蓋世汽車訊 攀爬機器人在現實世界中可能有許多有價值的應用,從完成屋頂或其他高層建筑的維護任務到為難以到達的地點運送包裹或救生包。然而,為了成功部署在現實世界中,這些機器人應該能夠有效地感知和繪制周圍環境,同時準確預測它們在地圖環境中的位置。
據外媒報道,廣東工業大學的研究人員最近開發出新方法,可以增強雙足攀爬機器人在攀爬桁架(即由直互連元件組成的三角形系統,可以是橋梁、屋頂或其他人造結構)。相關研究論文發表于期刊《Robotics and Autonomous Systems》,詳細介紹了基于同步定位與建圖(SLAM)算法。
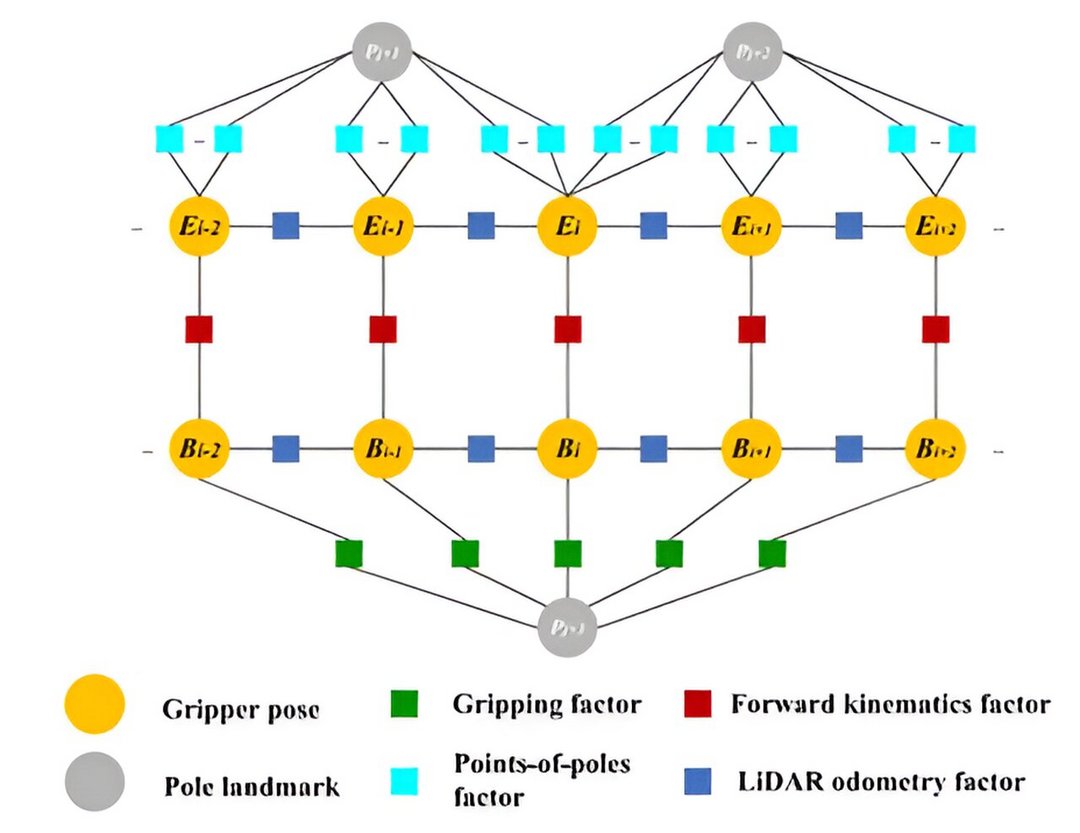
圖片來源:期刊《Robotics and Autonomous Systems》
“我們最近的工作將SLAM方法部署到一個特定的雙足攀爬機器人(BiCR)上,該機器人由我們的實驗室(名為仿生和智能機器人實驗室)開發,”該論文的合著者陳偉楠表示。
“BiCR是一種類似于移動機械手的機電系統,能夠通過兩端的夾具進行移動并通過多個關節進行旋轉。該機器人可用于高空和高風險環境中的安裝、維護和檢查,例如作為建筑工地腳手架和電力塔。”
來源:第一電動網
作者:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/225996
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號