蓋世汽車訊 據外媒報道,加拿大多倫多大學(University of Toronto)的一組工程研究人員正專注于提升自動駕駛汽車等機器人系統的推理能力,以增強此類系統在不斷變化的環境中的可靠性和安全運行能力。
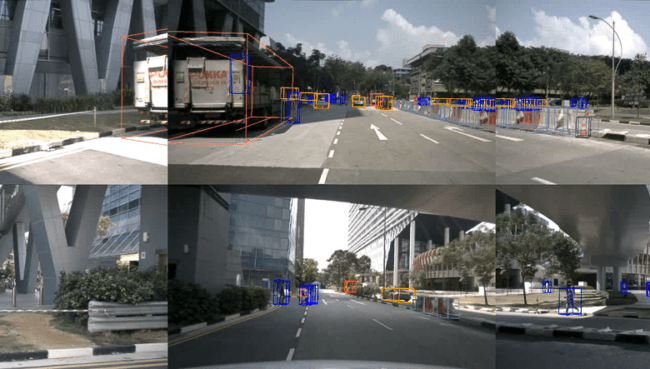
自動駕駛推理能力(圖片來源:多倫多大學)
多目標物體跟蹤是自動駕駛汽車領域中一個至關重要的問題,也是Steven Waslander教授領導的多倫多大學機器人與AI實驗室(UTIAS)的研究重點。機器人系統追蹤移動物體(包含其他車輛、行人和騎行者等)的位置和運動,從而在人口密集的地區規劃行進路徑。
追蹤信息主要從計算機視覺傳感器(2D攝像頭圖像和3D激光雷達掃描)中收集,并在每個時間戳處以每秒10次的頻率進行過濾,以預測移動物體的未來運動。
來源:第一電動網
作者:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/232327
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號