蓋世汽車訊在自然界中,飛行動物能夠感知周圍環(huán)境的變化,包括突然出現(xiàn)的湍流,并迅速做出調(diào)整以確保安全。設計飛機的工程師希望飛行器也具有同樣的能力,能夠預測即將到來的干擾并做出適當?shù)姆磻J聦嵣希绻w機具有這種自動感知和預測能力,并結合穩(wěn)定飛行器的機制,就可以避免飛機因湍流而發(fā)生的危險。
據(jù)外媒報道,來自加州理工學院(Caltech)自動駕駛系統(tǒng)和技術中心(CAST)和英偉達(Nvidia)的研究團隊取得新研究突破,為無人駕駛飛行器(UAV)開發(fā)的一種控制策略,稱為FALCON(Fourier Adaptive Learning and CONtrol,傅立葉自適應學習和控制),并發(fā)表于期刊《npj Robotics》。
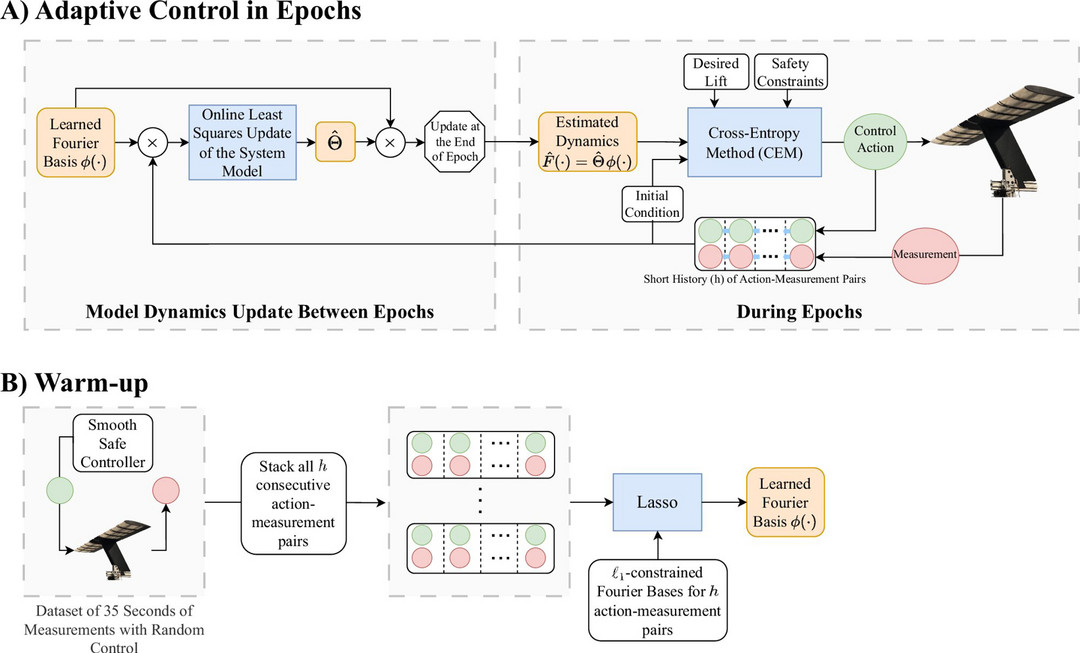
圖片來源:期刊《npj Robotics》
該策略使用強化學習(一種人工智能)來自適應地學習湍流風如何隨時間變化,然后利用這些知識根據(jù)實時體驗來控制無人機。
“自發(fā)湍流對從民用飛機到無人機等所有事物都有重大影響。隨著氣候變化,導致此類湍流的極端天氣事件正在增加,”航空和醫(yī)學工程漢斯·W·利普曼(Hans W. Liepmann)教授、CAST布斯-克雷薩(Booth-Kresa)領導主席、新論文作者Mory Gharib表示。“極端湍流也出現(xiàn)在兩種不同剪切流之間的界面上——例如,當高速風在高層建筑周圍遇到停滯時。因此,城市環(huán)境中的無人機需要能夠補償這種突然的變化。FALCON為這些飛行器提供了一種了解即將來臨的湍流并做出必要調(diào)整的方法。”
FALCON并不是第一個使用強化學習的無人機控制策略。然而,以前的策略并沒有嘗試學習真正代表湍流風如何運作的底層模型。相反,它們都是無模型方法。這類方法專注于最大化獎勵函數(shù),而這些函數(shù)無法用于處理不同的設置,例如不同的風況或車輛配置,因為它們只關注一種環(huán)境,所以需要重新訓練。
來源:第一電動網(wǎng)
作者:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/250215
以上內(nèi)容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯(lián)系admin#d1ev.com(#替換成@)刪除,轉載內(nèi)容并不代表第一電動網(wǎng)(m.155ck.com)立場。
文中圖片源自互聯(lián)網(wǎng),如有侵權請聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經(jīng)成功提交我們稍后會聯(lián)系您進行報價!

 京公網(wǎng)安備
11010502033163號
京公網(wǎng)安備
11010502033163號