自動(dòng)駕駛是否需要利用現(xiàn)有的技術(shù)把輔助駕駛做到「更好用」,這個(gè)答案是肯定的。2020 年就車企而言,重心應(yīng)該都會(huì)放在怎么樣實(shí)現(xiàn)更高級(jí)別的輔助駕駛,目前傳統(tǒng)車企以及新造車基本都是這樣的一個(gè)方向。
特斯拉長(zhǎng)續(xù)航版已公布售價(jià),新造車頭部企業(yè)已交付產(chǎn)品續(xù)航普遍也都可以做到了 500 km,對(duì)于續(xù)航方面的 PK 似乎正在接近目前電池技術(shù)的天花板。
而智能輔助駕駛現(xiàn)在能夠?qū)崿F(xiàn)什么樣的能力,直接決定著消費(fèi)者能體驗(yàn)到什么樣的功能,智能化也是車企之間競(jìng)爭(zhēng)的一個(gè)主戰(zhàn)場(chǎng),相比之下新造車普遍在智能化這塊,表現(xiàn)的要更為激進(jìn)。

而預(yù)熱了挺長(zhǎng)時(shí)間的小鵬 P7 也將在 4 月發(fā)布,對(duì)于這款車的除了官方宣稱的 706 km 續(xù)航,最為讓人關(guān)注的就是輔助駕駛了,為此我們聯(lián)系到了小鵬自動(dòng)駕駛產(chǎn)品總監(jiān)黃鑫,來(lái)了解一下小鵬在自動(dòng)駕駛的思路。
首先是 L3 這個(gè)級(jí)別,自從奧迪放棄了 L3 級(jí)別輔助駕駛后,似乎車企所堅(jiān)持的循序漸進(jìn)路線正在瓦解,而小鵬顯然不是這么認(rèn)為,就像黃鑫說(shuō)的,L3 其實(shí)很抽象,它只是工程上的定義,對(duì)于消費(fèi)者而言 L3 是什么或許并不關(guān)心,而且傳統(tǒng)意義上的「配置」已經(jīng)不再是讓消費(fèi)者盲目出錢的因素了。
也就是說(shuō)汽車發(fā)展到現(xiàn)在,用戶已經(jīng)被市場(chǎng)所教育,現(xiàn)在車企不光要解決功能的有和沒(méi)有,最核心的是有了之后它的使用體驗(yàn)會(huì)是怎么樣?消費(fèi)者更會(huì)在乎你實(shí)現(xiàn)了什么功能。
在工程定義下的 L3,你能做到和做好哪些能力,才是車企應(yīng)該思考的,而不能是叫高級(jí)別輔助駕駛但只能在園區(qū)或者封閉區(qū)域才能使用。

那小鵬怎么區(qū)別于市面上的其他 L3 級(jí)別的車,這些區(qū)分點(diǎn)在哪里?
黃鑫也解答了小鵬的解決思路,從消費(fèi)者的角度來(lái)看:
就是使用的「連續(xù)性」問(wèn)題,把輔助駕駛打開的時(shí)候,怎樣讓車主更少地介入,更少地去調(diào)整它。
對(duì)于消費(fèi)者端的「連續(xù)性」怎么理解就比較重要,如果使用過(guò)輔助駕駛功能的人會(huì)知道,在輔助駕駛開啟的狀態(tài)下,如果路況良好,行車秩序比較好,那么輔助駕駛會(huì)一直保持開啟的狀態(tài),但如果遇到路面有警示牌或者警示物被識(shí)別,它就會(huì)退出讓人來(lái)接管車輛,這也是廠商的標(biāo)準(zhǔn)做法。
要肯定的是這個(gè)邏輯是對(duì)的,這個(gè)時(shí)候讓人接管可以避免一些危險(xiǎn),但這里是有改進(jìn)的空間的。
突出的就是中國(guó)的路況問(wèn)題,道路修路情況很多,但有些時(shí)候雖然這些路在修也有警示牌,但在你駕駛經(jīng)過(guò)的時(shí)候其實(shí)真實(shí)路況非常好,但輔助駕駛依舊會(huì)給你退出,而遇到連續(xù)修路,你就會(huì)連續(xù)進(jìn)入和自動(dòng)退出。
這種體驗(yàn)就非常不好,而小鵬就會(huì)針對(duì)這樣的情況作出優(yōu)化。
黃鑫也為我們舉了例子:
其實(shí)現(xiàn)在的 ACC(自適應(yīng)巡航)、ALC(自動(dòng)變道)、LCC(車道保持)都是標(biāo)準(zhǔn)化的功能,但這些標(biāo)準(zhǔn)化的功能,消費(fèi)者在實(shí)際使用中會(huì)遇到一些細(xì)節(jié)問(wèn)題困擾,但車輛自身是不能解決的。而小鵬就是要根據(jù)實(shí)際能遇到的無(wú)數(shù)場(chǎng)景下,把這些標(biāo)準(zhǔn)化功能變得更「中國(guó)化」。
比如 ACC 在高速行駛沒(méi)有問(wèn)題,但在擁堵時(shí)候,因?yàn)橐话愀嚲嚯x就算調(diào)到最近,實(shí)際你發(fā)現(xiàn)還是非常遠(yuǎn),那這個(gè)時(shí)候如果開啟輔助駕駛你就會(huì)被加塞到崩潰;還有就是當(dāng)你正常行駛時(shí),旁邊車輛小角度變道過(guò)來(lái),能不能及時(shí)識(shí)別判斷,從而改變行車速度等,但并不需要退出輔助駕駛。

而 P7 通過(guò)車前攝像頭與雷達(dá)的配合以及車側(cè)攝像頭能夠可以做到短距離跟車以及車側(cè)無(wú)盲點(diǎn)監(jiān)測(cè),并且可以模仿真人駕駛,快速提速/減速緊跟前車,在保證安全之下,可以緊跟前車,避免被「中國(guó)式加塞」煩惱。
還有就是說(shuō) LCC 使用的時(shí)候,如果旁邊有大貨車,按標(biāo)準(zhǔn)做法就是只要兩車都保持車道行駛,就會(huì)與大貨車并行,但人的話一般是想盡快遠(yuǎn)離它的,而小鵬 P7 的做法就是如果探測(cè)到大型貨車,就會(huì)規(guī)避與它的并行,這就是輔助駕駛在模仿人的駕駛行為。
注意并不是說(shuō)遇到危險(xiǎn)不退出,而是在當(dāng)時(shí)行駛環(huán)境下,沒(méi)有危險(xiǎn)的情況下,車輛怎么對(duì)自身進(jìn)行調(diào)整,而這種調(diào)整更加符合人性化需求。
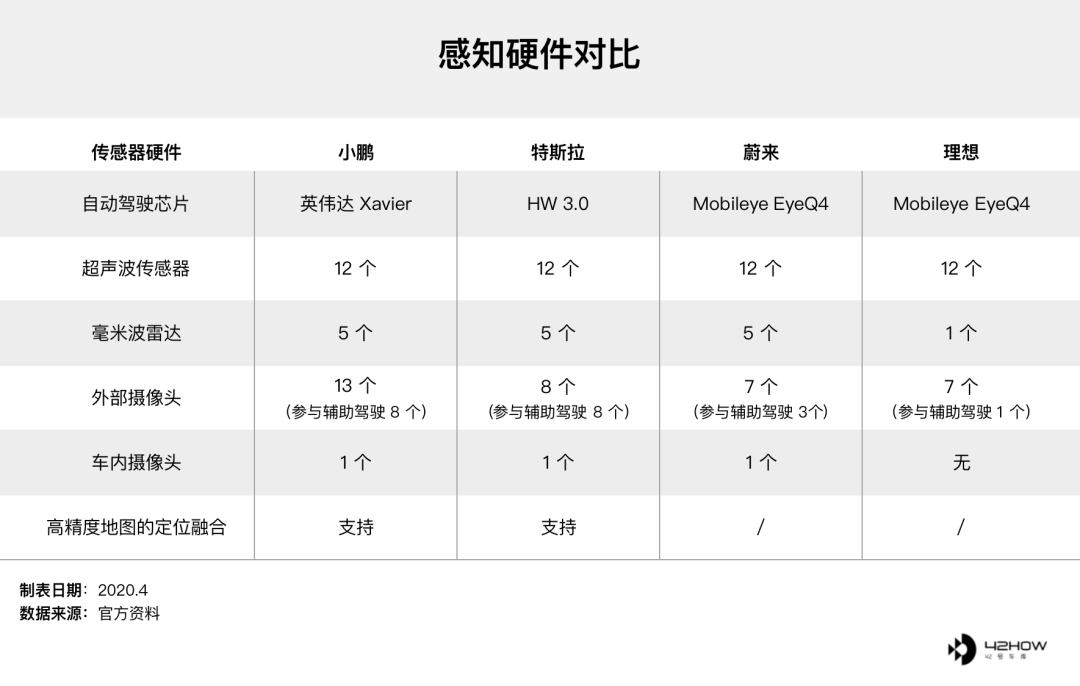
為了要實(shí)現(xiàn)這一目標(biāo),小鵬在硬件的使用可以用夸張來(lái)形容:
而且小鵬 P7 在第四季度也會(huì)實(shí)現(xiàn) NGP 功能的開放。
NGP 是什么?它是一種高精度地圖與定位融合的導(dǎo)航輔助駕駛能力,與特斯拉 NOA 實(shí)現(xiàn)的功能類似。
實(shí)際體驗(yàn)就是,當(dāng)開啟輔助駕駛后車輛自己會(huì)根據(jù)你所定位的目的地自己行駛,并且會(huì)根據(jù)路況實(shí)現(xiàn)變道超車,比如你行駛在三車道的高速路上,并在中間車道行駛,如果你定位的目的地出口在右邊,它會(huì)提前根據(jù)路況向右邊變道。
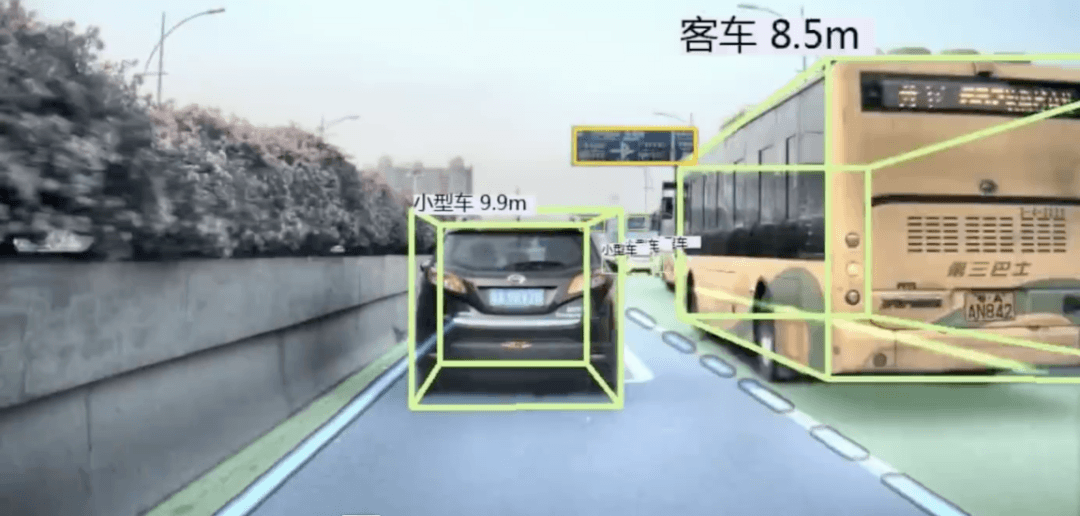
在自動(dòng)駕駛的感知層面,小鵬與特斯拉還是比較相似的,包括都是視覺感知為主。
而黃鑫也表達(dá)了小鵬與特斯拉的區(qū)別:
首先就是功能實(shí)現(xiàn)上,小鵬會(huì)和特斯拉看齊不會(huì)減少,當(dāng)然也不會(huì)隨意去增加。但是在功能使用上,小鵬則有自己的思考。
黃鑫說(shuō),就比如識(shí)別雪糕筒,現(xiàn)在行業(yè)也似乎把能識(shí)別雪糕筒作為輔助駕駛能力的一種體現(xiàn)。而問(wèn)題是識(shí)別雪糕筒后,能干嘛?這是一個(gè)問(wèn)題,這背后是一種什么樣的功能邏輯?
他說(shuō)特斯拉的視覺感知能力很強(qiáng),識(shí)別雪糕筒也是為了避免警示物帶來(lái)危險(xiǎn),但他體驗(yàn)的特斯拉會(huì)出現(xiàn),在遇到雪糕筒后輔助駕駛退出,連續(xù)遇到雪糕筒就會(huì)有連續(xù)人為進(jìn)入,自動(dòng)退出的情況,可其實(shí)當(dāng)時(shí)的路況,按人的判斷是非常好的,沒(méi)車,路面也寬(這里所指人不主動(dòng)打燈變道,會(huì)退出)。

黃鑫表示,其實(shí)這是非常典型的中國(guó)路況,對(duì)于小鵬而言,看重的就是這一類的場(chǎng)景,而且不是說(shuō)當(dāng)你開著輔助駕駛識(shí)別到了高速路或者城市路的雪糕筒系統(tǒng)就會(huì)退出,你人為接管避開,而是識(shí)別后能不能在安全的情況下,自動(dòng)變道或者慢行避開,并不需要退出系統(tǒng)。
所以這就產(chǎn)生了高速 NGP 產(chǎn)品的「中國(guó)式」需求,我們想要做根據(jù)用戶在使用過(guò)程中的一些需求去做一些特定的研發(fā)。
其次是特斯拉的激進(jìn)的做法,黃鑫也說(shuō)了此前他開了一輛剛升級(jí)到 HW3.0 的特斯拉,在過(guò)一個(gè)收費(fèi)站的時(shí)候,在進(jìn)入收費(fèi)站的時(shí)候車輛是開著輔助駕駛跟著前車而行,因?yàn)楦咚倜赓M(fèi),前車快速通過(guò),前車目標(biāo)已經(jīng)丟失,收費(fèi)站車道線也已經(jīng)沒(méi)有,這個(gè)時(shí)候特斯拉居然選擇不退出,在到限高桿的時(shí)候儀表已經(jīng)報(bào)警,特斯拉依舊沒(méi)有退,黃鑫表示,這樣太過(guò)激進(jìn),就他個(gè)人會(huì)覺得有點(diǎn)過(guò)了。
而小鵬理解的輔助駕駛是要在心理預(yù)期之上,但又符合情理之中的一種功能,不能是超越「人」內(nèi)心恐懼紅線的,因?yàn)槟菢涌赡軙?huì)帶來(lái)更大的危險(xiǎn)。
而且我們從黃鑫那也了解到,針對(duì)中國(guó)道路交通標(biāo)識(shí)與雪糕筒之類的警示物,小鵬做了大量的優(yōu)化,關(guān)于可識(shí)別的交通標(biāo)識(shí),他沒(méi)有說(shuō)具體的數(shù)字,但他表示比博世還會(huì)多很多。
其實(shí)不止如此,此前我們體驗(yàn)過(guò)特斯拉在下大雨的路況下,那個(gè)時(shí)候幾乎人眼已經(jīng)都很難看清路面,而特斯拉依舊沒(méi)有退出輔助駕駛,我們?cè)儐?wèn)了小鵬 P7 能否完成。
首先在強(qiáng)極端條件下,肯定是不建議開啟,但黃鑫說(shuō),小鵬 P7 此前的確遇到過(guò)非常大雨的極端天氣,并且依然能夠?qū)崿F(xiàn)行駛,而這個(gè)時(shí)候并不是攝像頭在工作,因?yàn)閿z像頭已經(jīng)致盲,P7 則是依靠毫米波雷達(dá)和高精地圖實(shí)現(xiàn)駕駛。
上面我們可以看到小鵬的思路其實(shí)是場(chǎng)景功能優(yōu)先原則在,從橫向來(lái)看小鵬與其他廠商一樣,該有的功能都會(huì)有,這也是向行業(yè)看齊,也就是所謂的標(biāo)準(zhǔn)功能,但在此基礎(chǔ)上小鵬的第一原則就是「用戶」,用戶在中國(guó)那么他就深化「中國(guó)式」場(chǎng)景,做到功能優(yōu)化,也就是「你無(wú)我有,你有我優(yōu)」。
在和黃鑫溝通中我們也拋給了他一個(gè)靈魂拷問(wèn),「特斯拉和 P7 都開過(guò)后這二者的差距或者區(qū)別在哪?」
黃鑫的回答首先是肯定了特斯拉的優(yōu)秀,并表示目前 P7 和特斯拉會(huì)有一些差距,按前年他在北美試駕的特斯拉 AP ,和現(xiàn)在特斯拉向中國(guó)推送的 AP 現(xiàn)在的進(jìn)步非常大,做了很多人性化的優(yōu)化,而 P7 現(xiàn)在的能力則和去年 7 月的特斯拉差不多,雖然有差距但他覺得今年第四季度 P7 就會(huì)像現(xiàn)在的特斯拉一樣。
我們也向黃鑫詢問(wèn)了更多關(guān)于 P7 的輔助駕駛的能力,問(wèn)題如下:
問(wèn):關(guān)于 G3 跑的數(shù)據(jù),由于傳感器的變化,數(shù)據(jù)能否復(fù)用?
答:P7 和特斯拉一樣,除了 G3 上面數(shù)據(jù)可以復(fù)用,那就是他也會(huì)用攝像頭去收集實(shí)時(shí)的數(shù)據(jù)。因?yàn)?G3 在架構(gòu)上和 P7 還是有較大區(qū)別,整個(gè)數(shù)據(jù)雖然并不能完全還原到 P7 可以提供一個(gè)比較好的輸入,因?yàn)榫脱邪l(fā)而言,并不需要單個(gè)數(shù)據(jù),而是要群體數(shù)據(jù),比如說(shuō)自動(dòng)泊車的垂直車位和平行車位,它的分別的占比和使用成功率以及效率是完全可以復(fù)用。
問(wèn):有些車企開發(fā)了非常多的功能,但開放需要一些限定條件,小鵬有沒(méi)有相關(guān)的一些開啟條件就是能夠覆蓋多少種場(chǎng)景?
答:首先來(lái)說(shuō)在第一批開放的場(chǎng)景里面基本上會(huì)向整個(gè)行業(yè)的一個(gè)標(biāo)準(zhǔn)水平看齊;第二步的話,會(huì)把這些場(chǎng)景和研發(fā)能力相結(jié)合,進(jìn)一步去做到更好的覆蓋。比如說(shuō)在一些隧道這種沒(méi)有信號(hào),GPS 信息的區(qū)域,不會(huì)對(duì) NGP 做降級(jí),我們會(huì)保證這樣的場(chǎng)景也能安全行駛通過(guò)。
問(wèn):還有就是有些功能開啟,誤判率會(huì)很高,本來(lái)沒(méi)事他就會(huì)發(fā)出警報(bào),特別影響體驗(yàn),小鵬怎么規(guī)避,正確報(bào)警和誤報(bào)?
答:第一就是沒(méi)事別出來(lái),有重要的事你再出來(lái),但有救命的事你一定要出來(lái),安全是第一是原則,首先通過(guò)數(shù)據(jù)去看,比如說(shuō)像車道偏離預(yù)警,此前有過(guò)數(shù)據(jù),很多用戶手動(dòng)關(guān)掉了,但有些人因?yàn)橹形玳_車犯困不建議關(guān)掉,所以在交互上小鵬的處理是可能先默認(rèn)關(guān)掉,但可以根據(jù)傳感器監(jiān)測(cè)駕駛員的疲勞,關(guān)聯(lián)這個(gè)功能,監(jiān)測(cè)到疲勞了他就會(huì)開啟,就類似于這樣的邏輯。
問(wèn):此前有 P7 的視頻在高速上可以多條標(biāo)示線的正確識(shí)別這是怎么做到的?
答:首先要看,干擾線是一開始就有還是突然出現(xiàn),它如果是突然出現(xiàn)的,所以車輛會(huì)根據(jù)原來(lái)正確的時(shí)候的車道線,它去反推車道線出現(xiàn)的位置和出現(xiàn)的時(shí)機(jī),然后和這條車道線在整個(gè)車道線中央的一個(gè)規(guī)律,去把這樣的一個(gè)這是不正常的東西做剔除。所以判定邏輯并不是顏色。
寫在最后
我們梳理一下小鵬在自動(dòng)駕駛的思路,首先為了安全以及冗余需求,硬件架構(gòu)堪稱豪華,而且為了后續(xù)更好的系統(tǒng)匹配以及較大的自主權(quán),選擇自研視覺感知系統(tǒng)。
其次是在功能方面,也是小鵬自動(dòng)駕駛核心的邏輯點(diǎn),縱向來(lái)看,P7 會(huì)在發(fā)布后分階段去開放功能,首先會(huì)開放 G3 上已經(jīng)有的并且會(huì)在 P7上進(jìn)行優(yōu)化,然后預(yù)計(jì)到今年第四季度 NGP 功能開放。橫向來(lái)看,開放的功能基本會(huì)向友商看齊,達(dá)到市場(chǎng)主流水平。
最后就是小鵬會(huì)根據(jù)「中國(guó)式」需求進(jìn)行功能優(yōu)化,簡(jiǎn)單理解就是文中我們說(shuō)的,這些功能都是標(biāo)準(zhǔn)化的功能,如何在廠商之間做差異化,那就是考驗(yàn)廠商對(duì)「用戶」需求的敏感程度了,和黃鑫聊完明顯感覺針對(duì)中國(guó)場(chǎng)景下的功能優(yōu)化會(huì)是小鵬關(guān)注的重點(diǎn)。
P7 會(huì)進(jìn)一步優(yōu)化自動(dòng)泊車功能,這項(xiàng)功能依舊會(huì)是 P7 非常大的亮點(diǎn),小鵬使用的視覺泊車識(shí)別系統(tǒng),不需要像傳統(tǒng)泊車使用側(cè)視攝像頭,等車輛開過(guò)車位后才能發(fā)現(xiàn),而可以利用特有的側(cè)前向攝像頭提前發(fā)現(xiàn)前方車位。
攝像頭保證了功能開啟時(shí)的成功率,并且可以對(duì)于停車場(chǎng)的空間進(jìn)行數(shù)據(jù)建模并記錄。對(duì)于沒(méi)去過(guò)的停車場(chǎng),一般經(jīng)過(guò)三次數(shù)據(jù)的收集即可實(shí)現(xiàn)這個(gè)場(chǎng)景的覆蓋,而且數(shù)據(jù)會(huì)被上傳云端分享給其他小鵬車主,也就是說(shuō)沒(méi)來(lái)過(guò)的小鵬車主通過(guò)數(shù)據(jù)共享也能實(shí)現(xiàn)精準(zhǔn)泊車。
來(lái)源: 42號(hào)車庫(kù)
本文地址:http://m.155ck.com/carnews/xinche/114171
以上內(nèi)容轉(zhuǎn)載自 42號(hào)車庫(kù),目的在于傳播更多信息,如有侵僅請(qǐng)聯(lián)系admin#d1ev.com(#替換成@)刪除,轉(zhuǎn)載內(nèi)容并不代表第一電動(dòng)網(wǎng)(m.155ck.com)立場(chǎng)。
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請(qǐng)聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價(jià)再買車,買的放心開的安心
您的詢價(jià)信息
已經(jīng)成功提交我們稍后會(huì)聯(lián)系您進(jìn)行報(bào)價(jià)!

 京公網(wǎng)安備
11010502033163號(hào)
京公網(wǎng)安備
11010502033163號(hào)