
6月22日,帝都終于下了一場綿長的好雨,暑氣略消。
新冠疫情緩解,線下活動正在恢復(fù)。《電動汽車觀察家》參加了理想關(guān)于L9 Max的媒體溝通會。
“國內(nèi)最拔尖的幾個人都在我們團(tuán)隊里。”
理想汽車整車電動副總裁劉立國,在講到理想L9 Max的CDC(連續(xù)可調(diào)阻尼減震器系統(tǒng))算法結(jié)構(gòu)設(shè)計時,說出如此“豪言”。
站在另一邊的李想,聞言扭頭看向劉立國,強(qiáng)忍笑意,得意之色溢于言表。
僅僅三年半的時間,曾經(jīng)最不被看好的理想汽車,憑借理想ONE一款車型證明了自己,牢牢占據(jù)新造車勢力頭部位置。銷量位居30-35萬元級整體汽車細(xì)分市場第一。
此時,所有人都開始正視售價高達(dá)45.98萬元理想L9 Max(下稱L9),李想“L9銷量妥妥超過理想ONE”的flag,可信度也大了起來。
理想汽車為什么能取得目前的成功?L9為什么呈現(xiàn)出驚人的吸引力和競爭力?
團(tuán)隊、技術(shù)都是表層,深層次的邏輯,在于李想帶領(lǐng)理想汽車,探索出的“蘋果式造車法”。
01
45萬的L9——高性價比車型
現(xiàn)在的新車發(fā)布會沒有金句是不行的。
6月21日,理想旗艦車型L9的發(fā)布會上,理想汽車創(chuàng)始人李想放言:“(L9的駕駛性能和乘坐舒適性)哪怕是與庫里南相比,我們也完全不怕。”
駕乘體驗到底如何,還需L9大規(guī)模交付之后消費者給出評判。但值得注意的是,無論是“500萬以內(nèi)最好用的家用SUV”,還是拉上奔馳GLS、寶馬X7,甚至庫里南來做競品,李想的核心目的并非在宣傳上抬高L9的身價,而是將理想“蘋果式高性價比”的產(chǎn)品邏輯亮在明面上。
“蘋果做的是——讓大家往上夠一下就可以買到一個過去奢侈品/高級別才能夠擁有的產(chǎn)品體驗和產(chǎn)品細(xì)節(jié)。”
李想認(rèn)為蘋果的核心產(chǎn)品理念:其一是將一個過去極致奢侈的產(chǎn)品變得普世化,眾人“夠得著”;其二是在體驗和技術(shù)上做出非常獨特的創(chuàng)新來獲取消費者多花一點錢的消費意愿。
“我們對于蘋果的理解是這樣的,我們也會堅持用這樣的方式去做。”
蘋果式性價比產(chǎn)品落地的特征之一是化繁為簡,從車型到配置都進(jìn)行簡化和標(biāo)配。

L9標(biāo)配空氣懸架
L9公布售價之后,大屏幕上滿滿當(dāng)當(dāng)?shù)貙懥?00項標(biāo)配配置。其中不乏諸如全車座椅電動調(diào)節(jié)、全景天幕和電動遮陽簾、空氣懸架、2160瓦功率的7.3.4全景聲音響等傳統(tǒng)豪車常用的選配項目。以及理想AD Max智能駕駛系統(tǒng)這樣新造車勢力的收費項目。
L9的選配項目僅有三個特別版車漆和電動踏板,“踏板這東西有的人個子高用不上,所以必須是選配。”李想說。
車型方面,四年兩款車型,且每款車型只有一個產(chǎn)品的布局速度絕對稱不上快。李想表示,未來將應(yīng)用蘋果式樣性價比邏輯,非常克制地打造產(chǎn)品。
“全系標(biāo)配”近年來已成為20-25萬元級及以下汽車產(chǎn)品打造性價比的一個重要手段。但在35萬元級及向上的豪華品牌核心價格帶,給用戶提供各式“選配”與品牌溢價一樣,是豪華品牌獲利和維護(hù)品牌門檻的商業(yè)模式,更有諸如保時捷、蘭博基尼等品牌會限制產(chǎn)品以維護(hù)奢侈品牌的稀缺性。
從這個角度來看,雖然售價進(jìn)入了45萬元的豪華價格帶,但理想并不是傳統(tǒng)豪華品牌高溢價的商業(yè)模式,而是希望通過規(guī)模化將奢侈級的高端配置變得普世化。
“我們認(rèn)為40萬以上的價格區(qū)間非常健康。我們使用的很多技術(shù)在早期非常昂貴,需要一款比較貴的車,并且把規(guī)模擴(kuò)大后降低成本,再往后推廣給我們不同價位的車,這是核心的一個選擇。”李想在采 訪中表示。
02
要規(guī)模化,家庭用車市場夠大嗎?
大規(guī)模標(biāo)配能走通的前提,是能夠?qū)⒏叨伺渲玫母叱杀居靡?guī)模化攤薄。而要實現(xiàn)規(guī)模化,根本上是要做出能夠滿足消費者需求的產(chǎn)品。
要討論45萬元的L9能夠月銷過萬,首先要必須考慮創(chuàng)始人的“出身”。
李斌長于資本運作,蔚來起手就舍得花五年后的錢,高舉高打,打造豪華品牌、產(chǎn)品和技術(shù)布局;
何小鵬的UC是當(dāng)年少有的自研內(nèi)核,小鵬汽車也第一個追隨特斯拉,走上全棧自研的道路;
李想的汽車之家掌握中國最全面、最一線的用戶需求,理想汽車首款產(chǎn)品就用不那么高精尖的增程式拿下35萬元的細(xì)分市場。
 理想L9售價看似高,卻有該級別極強(qiáng)的性價比
理想L9售價看似高,卻有該級別極強(qiáng)的性價比
“我不相信任何人在做市場研究的時候,能超過我在汽車之家時做的研究。”李想在采 訪中這樣解釋理想汽車定位家庭用戶群的原因:
“20萬以上價格區(qū)間內(nèi),89%是家庭用戶。如果我對著市場天天講高端,沒人理你,甚至團(tuán)隊都不知道怎么去做產(chǎn)品。但當(dāng)你講家庭的時候,團(tuán)隊會把每一分錢、每一份技術(shù)都圍繞家庭去打造。”
“我覺得這是不一樣的。這是定位的問題。”
03
花錢,打造非常獨特的創(chuàng)新
如何將定位轉(zhuǎn)化為規(guī)模化的銷量?李想的計劃是用“非常獨特的創(chuàng)新”。
理想ONE憑借六座大空間和增程式,打準(zhǔn)了家庭用車對能耗性價比的需求點。如今L9在空間和增程式的基礎(chǔ)上,玩起了炫酷的技術(shù)。
不懼庫里南的駕乘舒適性、語音/手勢的多維交互模式、落地標(biāo)配的高速領(lǐng)航甚至城市領(lǐng)航智能駕駛輔助能力,以及十萬公里誤觸發(fā)率已低到0.31次的AEB自動緊急制動系統(tǒng)等等。
但與時下絕大部分新車通過供應(yīng)商能力實現(xiàn)功能堆料不同,L9所應(yīng)用的一系列創(chuàng)新體驗背后是理想自有的團(tuán)隊和技術(shù)作為支撐。
“理想汽車有4支AI和算法團(tuán)隊獨立的在跑。”李想向《電動汽車觀察家》表示,最大的團(tuán)隊在智能駕駛場景;第二是智能座艙團(tuán)隊;第三是包括銷售、工廠系統(tǒng)在內(nèi)的內(nèi)部開發(fā)系統(tǒng);第四是車輛控制團(tuán)隊。
“工廠里機(jī)器人的控制程序都是我們拿AI算法來寫的,因為外采的控制程序做的太差,成本太高;增程器、增程的工作路況、懸架,電池故障各種的預(yù)測都是通過算法和人工智能來做的。”李想表示,
 理想L9在尺寸上比肩頂級SUV,但車內(nèi)空間更大
理想L9在尺寸上比肩頂級SUV,但車內(nèi)空間更大
“(AI和算法團(tuán)隊)這是我們過去三年一直在認(rèn)真儲備的。我們認(rèn)為智能電動汽車承載兩個重要的目的:一是能源可再生化;二是(推動)人工智能進(jìn)入三維世界。所以我們在人工智能和(通過人工智能)解決三維世界的問題上投入了大量的人、錢和精力。這是和傳統(tǒng)品牌很大的不同。”
2021年開始,帶有“摳門”標(biāo)簽的理想開始大力投入研發(fā),研發(fā)支出一路大幅翻番開始追上,甚至超過蔚來和小鵬。
“其實從2020年IPO以后,我們可以在研發(fā)上投入更多的錢.。”李想表示,“過去真的沒有錢,但是有錢以后真的往里投,現(xiàn)在可以看到像XCU、像各種各樣的主板都是我們自己來設(shè)計的。”
此外,理想還建立起了自己的供應(yīng)鏈體系。
此次L9所應(yīng)用的增程器出自理想控股的公司,電機(jī)和電池也是理想的合資公司。“(構(gòu)建自己的供應(yīng)鏈體系)一是實現(xiàn)技術(shù)可控,提升研發(fā)效率;二是把供應(yīng)能力掌握在自己手里,避免出現(xiàn)理想ONE那樣供應(yīng)商供貨不足導(dǎo)致的產(chǎn)能受限;第三也有一些成本優(yōu)勢。”李想表示。
04
如何不怕庫里南
針對不同場景獨立運行的AI和算法團(tuán)隊,加上自有的供應(yīng)鏈體系,為L9落地蘋果式的高性價比打下了基礎(chǔ)。
L9在駕乘舒適性方面喊出不怕庫里南的口號,是以車輛控制的一系列自研成果為基礎(chǔ)。
在L9上,理想自研了基于最新恩智浦芯片的車控域控制器XCU,以及其上的核心控制算法。
理想自研的XCU中央域控制器
劉立國告訴《電動汽車觀察家》L9上CDC相關(guān)算法的前期結(jié)構(gòu)設(shè)計是由國內(nèi)最頂尖的人才團(tuán)隊負(fù)責(zé),并且也與國際對頂尖的公司進(jìn)行合作;與此同時,CDC減震器的算法也并非從零開始,而是理想與保時捷工程一道進(jìn)行的白盒交付開發(fā),“我們和卡宴用一樣的架構(gòu)和算法,而且我們結(jié)合了更多的車內(nèi)傳感器使我們能夠精準(zhǔn)識別路面。”
更重要的是,雖然目前車上算法仍是被動控制,即基于車身對地面產(chǎn)生反饋后進(jìn)行的控制。而理想已經(jīng)在系統(tǒng)上,將車控域與視覺、激光雷達(dá)等傳感器實現(xiàn)了交互融合,以提前識別路面情況,打算主動控制的車控算法,“所有代碼和算法都在我們自己手里。”
不再直接交給國外大廠調(diào)校,而是自研車控算法將幫助理想積累汽車制造當(dāng)中門檻最高的核心Know how。
此外,理想還在更多傳統(tǒng)的外采領(lǐng)域?qū)崿F(xiàn)自研:L9座椅的人體工程是基于理想自研具備體表、肌肉、關(guān)節(jié)和骨骼的中國人體模型仿真數(shù)據(jù)設(shè)計;車內(nèi)空調(diào)也是基于中國地域特色和使用習(xí)慣的自研熱力模型仿真布置。
05
人格化的理想同學(xué)
如果說自研車輛控制、人體工學(xué)、車內(nèi)熱力模型等領(lǐng)域,是理想在追趕傳統(tǒng)汽車企業(yè)通過時間和金錢積累的領(lǐng)先優(yōu)勢。那么在智能座艙和智能駕駛領(lǐng)域,理想則希望處于時代的領(lǐng)先位置。
從目前的功能實現(xiàn)來看,L9目前車內(nèi)多塊屏幕之間的相互跨越、抬頭顯示替代儀表盤、手勢控制、語音交互等能力,與許多智能座艙能力較強(qiáng)的新老汽車品牌并沒有非常明顯的優(yōu)勢和不同。
但智能座艙背后的“理想同學(xué)”卻很有意思。

理想同學(xué)AI模型的進(jìn)化路線圖
理想同學(xué)目前還屬于一個由關(guān)鍵詞觸發(fā),能夠執(zhí)行語音/手勢/觸控命令的初級智能AI。按照計劃至2023年Q2,理想同學(xué)將處于軟件1.0的階段,主要基于工程師主動“喂養(yǎng)”的元數(shù)據(jù)圖譜進(jìn)行機(jī)器學(xué)習(xí),能夠基于車內(nèi)人命令觸發(fā)式的執(zhí)行各項任務(wù);
之后,理想同學(xué)則將逐步進(jìn)入軟件2.0時代(至2024年Q4),以通過數(shù)據(jù)驅(qū)動無監(jiān)督的自主學(xué)習(xí),能夠根據(jù)人\車\場景情況自發(fā)提供被要求,或未被明確要求,而是基于自身推理理解,得出的各類服務(wù);
至2025年年底,“理想同學(xué)”則將人格化,“更像你身邊的朋友或是家人”。理想汽車智能空間副總裁勾曉菲表示。
為實現(xiàn)理想同學(xué)AI模型的進(jìn)化能力,理想的智能座艙團(tuán)隊在軟硬件方面都做了諸多部署。
軟件方面,“理想同學(xué)”目前采用視覺和聽覺兩套感知體系。其中視覺感知構(gòu)建了基于深度學(xué)習(xí)的多目視覺融合網(wǎng)絡(luò),能夠在三維層面辨認(rèn)車內(nèi)人員的神態(tài)、手勢和動作;
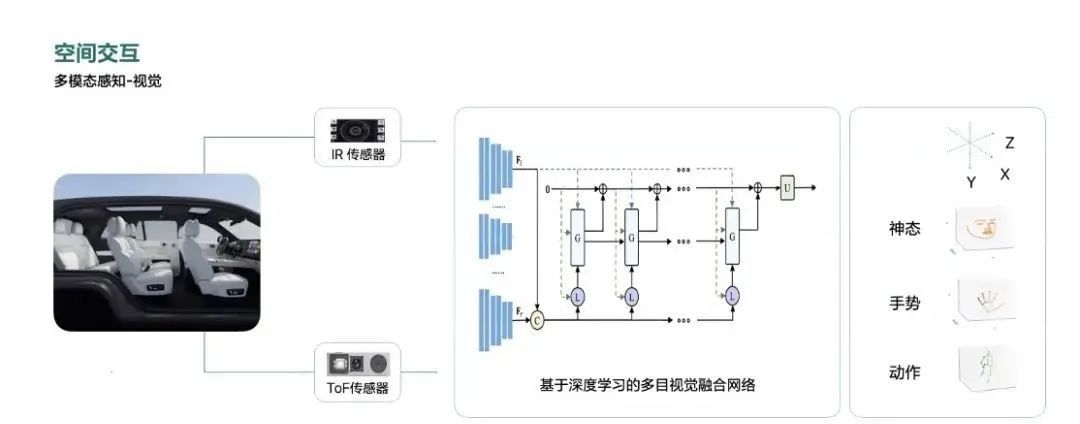
理想同學(xué)的視覺感知體系
聽覺感知則由一套基于多音區(qū)增強(qiáng)的深度卷積循環(huán)神經(jīng)網(wǎng)絡(luò)MIMO-NET執(zhí)行,相比傳統(tǒng)算法,音區(qū)定位準(zhǔn)確率提升20%,多人場景下識別錯誤率下降30%。
硬件方面,聽覺和觸控由多音區(qū)麥克風(fēng)和觸控設(shè)備完成,視覺則引入了IR紅外線傳感器和ToF傳感器協(xié)同。以及兩顆高通8155大算力芯片支持。
TOF是飛行時間(Time of Flight)技術(shù)的縮寫,即傳感器發(fā)出經(jīng)調(diào)制的近紅外光,遇物體后反射,傳感器通過計算光線發(fā)射和反射時間差或相位差,來換算被拍攝景物的距離,以產(chǎn)生深度信息,此外再結(jié)合傳統(tǒng)的相機(jī)拍攝,就能將物體的三維輪廓以不同顏色代表不同距離的地形圖方式呈現(xiàn)出來。

理想同學(xué)的聽覺感知體系
勾曉菲向《電動汽車觀察家》表示,基于這樣的軟硬件,“理想同學(xué)”能夠繪制一張完整的車內(nèi)3D圖像,深度可精確到1毫米。AI模型在這張圖像中進(jìn)行推理決策。“我們最終的感知一定是聽覺加視覺的融合感知,我們實現(xiàn)的功能,比如打開這個打開那個,就是視覺和聽覺的融合。”
06
理想AD Max跑得飛快
不過真正確定理想智能化水平的核心賽點,還是智能駕駛輔助能力。
在“蔚小理”當(dāng)中,理想在智能駕駛領(lǐng)域?qū)儆诤蟀l(fā)選手,直到去年年底才向用戶推送的NOA高速領(lǐng)航輔助功能,比蔚來和小鵬晚了一年多。但隨著NOA的推送,理想智能/自動駕駛技術(shù)研發(fā)也完成了從依賴第三方到全棧自研的模式切換。
按照理想智能/自動駕駛技術(shù)的邏輯計劃,2020年理想AD實現(xiàn)L2級的ADAS能力,2021和2023年,實現(xiàn)從第三方到自研高速NOA的能力,2024年實現(xiàn)城市NOA,2025年則實現(xiàn)城市FSD(完全自動駕駛)。

理想智能/自動駕駛能力規(guī)劃
這一過程伴隨著理想智能/自動駕駛技術(shù)體系能力的不斷建設(shè)完善:2020年實現(xiàn)數(shù)據(jù)回傳、2021年數(shù)據(jù)的自動標(biāo)注,2022年形成完成的數(shù)據(jù)閉環(huán)鏈路,2023到2024年全鏈路數(shù)據(jù)自動化迭代,2025年實現(xiàn)100億公里的智能/自動駕駛里程。
“要最終實現(xiàn)城市級的完全自動駕駛能力,最基礎(chǔ)一個數(shù)據(jù)是100億公里。需要在100億公里的場景中驗證我的自動駕駛能力達(dá)到根人類接近的水平。”理想汽車智能駕駛副總裁郎咸朋表示,“我們希望理想的自動駕駛團(tuán)隊是國內(nèi)首先達(dá)到FSD能力的團(tuán)隊。”
想要后發(fā)先至,理想從研發(fā)流程、算法和數(shù)據(jù)三個層面進(jìn)行投入。
1,研發(fā)流程
郎咸朋介紹,隨著理想AD Max的交付,理想AD完整自主學(xué)習(xí)鏈路已經(jīng)完全打通。
在產(chǎn)品研發(fā)階段采用人工測試驗證的方式,成本耗時巨大。目前,理想自動駕駛團(tuán)隊將這一過程升級為自主學(xué)習(xí)驗證模式,即讓整個算法/軟件功能自動發(fā)現(xiàn)問題,解決問題,由此大幅提升迭代效率。
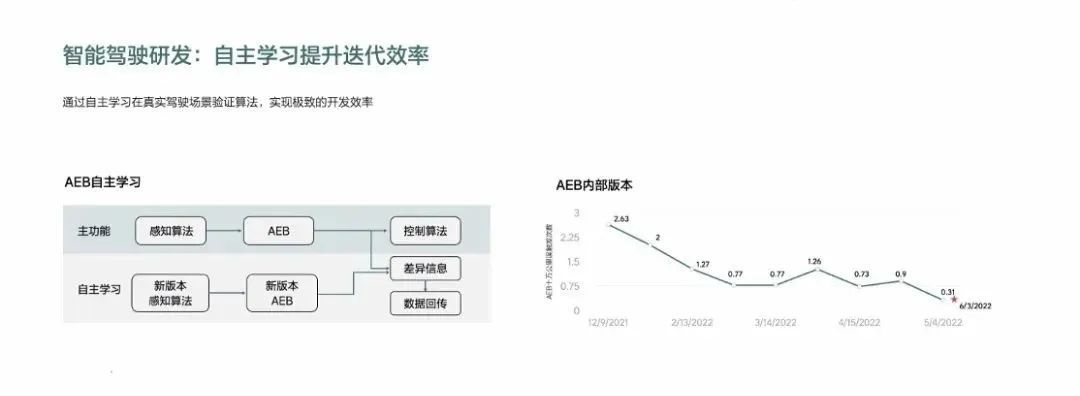
應(yīng)用自主學(xué)習(xí)流程后理想AEB的迭代情況
以理想的AEB功能迭代為例。通過在車輛上同時搭載新舊兩套AEB版本,老版本在車端執(zhí)行任務(wù),新版本則對照實際場景及老版本的操作結(jié)果,發(fā)現(xiàn)差異信息,進(jìn)行數(shù)據(jù)回傳后學(xué)習(xí)、修正“自己”,進(jìn)行迭代。最終,在短短6個月的時間里,理想AEB的每十萬公里誤觸發(fā)率從1次下降到0.31次。
郎咸朋還表示,在產(chǎn)品交付之后,理想還通過質(zhì)量工單和客戶在APP的反饋等多種渠道持續(xù)收集反饋數(shù)據(jù),用以迭代系統(tǒng)。
2, 算法架構(gòu)
理想AD Max的算法將采取強(qiáng)視覺感知與激光雷達(dá)、高精地圖融合的技術(shù)路線。而且為了增強(qiáng)安全性,理想AD Max還在主算法之外,增加了視覺安全和Lidar安全兩套算法作為冗余,其將單獨調(diào)用對應(yīng)的視覺和雷達(dá)感知系統(tǒng),參與主算法的4D環(huán)境建模工作。
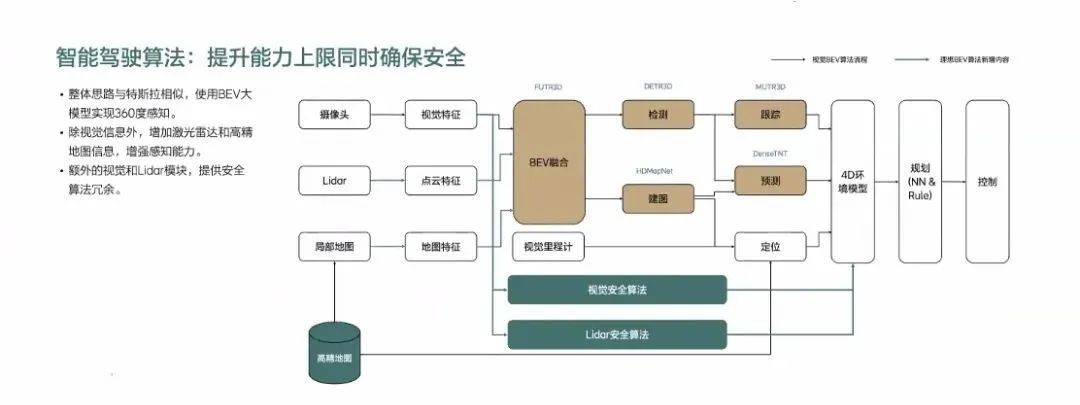
理想AD算法架構(gòu)
兩套安全冗余算法并不是理想AD Max唯一的獨創(chuàng)之處。
理想AD 系統(tǒng)包括FUTR3D BEV融合算法、DETR3D檢測算法、HDMapNet建圖算法、MUTR3D跟蹤算法和DenseTNT預(yù)測算法。
其中,基于BEV算法進(jìn)行視覺感知在業(yè)內(nèi)屬于少數(shù)。
BEVFormer 是基于Transformer和時序模型在鳥瞰圖視角下優(yōu)化特征的環(huán)視物體檢測方案,其在多視角攝像頭的3D目標(biāo)檢測任務(wù)上性能指標(biāo)脫穎而出。通過BEV算法,L9可以建立與特斯拉感知類似的360°全場景圖像。
在BEV基礎(chǔ)上,理想在業(yè)內(nèi)首次提出基于BEV進(jìn)行的感知融合算法FUTR3D。郎咸朋表示該融合算法的一大特點是可插拔,可任意替換和增減傳感器,不會影響算法架構(gòu)。
換而言之,即在有零個/一個/多個激光雷達(dá),和不同攝像頭的車輛上,F(xiàn)UTR3D都可輕易適配使用,為理想未來PRO\MAX不同版本的感知體系通用算法提供基礎(chǔ)。
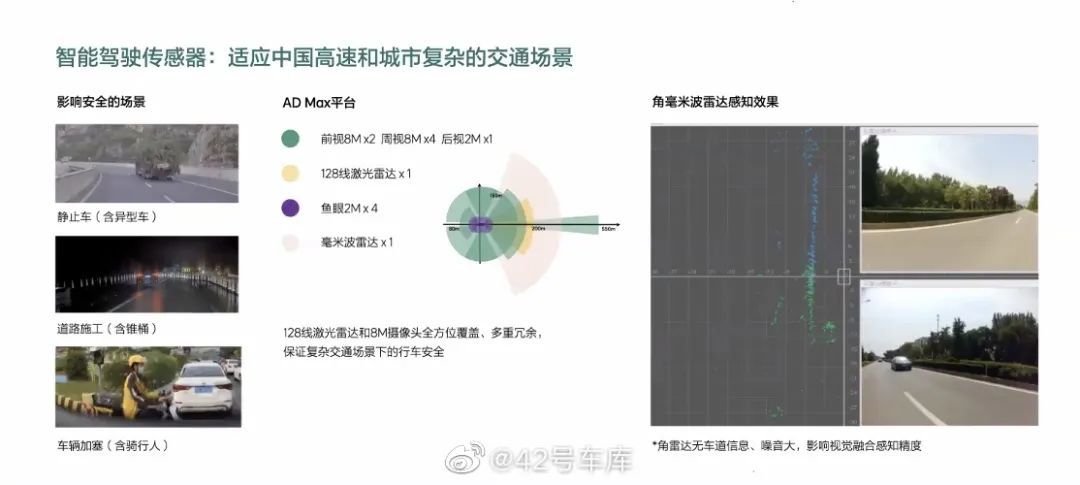
當(dāng)環(huán)視視覺能力很強(qiáng)之后,理想取消了效果不佳的角雷達(dá)設(shè)置
建圖算法則使理想AD Max在城市場景下邊走邊構(gòu)建實時的高清地圖,由此減少系統(tǒng)在城市場景下對高精地圖的依賴,更快落地更多城市。
理想AD的檢測、跟蹤、預(yù)算算法也都在近期的相關(guān)專業(yè)比賽中分別拿到了第一的成績。
與AEB一樣,理想AD也將在自主學(xué)習(xí)的研發(fā)模式下不斷迭代成長。
3, 數(shù)據(jù)
數(shù)據(jù)是各家自動駕駛競爭的核心戰(zhàn)場。
郎咸朋表示,得益于標(biāo)配NOA的商業(yè)決策,目前理想智能駕駛有效學(xué)習(xí)場景總里程已達(dá)到1.9億公里。有效學(xué)習(xí)樣本總量3.3億幀。
這些數(shù)據(jù)的取得一方面是基于理想ONE持續(xù)的熱銷,另一方面則得益于理想自建的自動數(shù)據(jù)標(biāo)注體系。
郎咸朋表示,理想數(shù)據(jù)表現(xiàn)類型超過150個。其中車端被觸發(fā)收集后,將標(biāo)注接管、特殊場景、異常等場景屬性。當(dāng)數(shù)據(jù)上傳到云端后,將會更加具體的標(biāo)注包括天氣、光照、道路條件等100多個標(biāo)簽。
由此,理想工程師可針對不同的優(yōu)化需求來檢索特定的場景強(qiáng)化“喂養(yǎng)”AI模型。
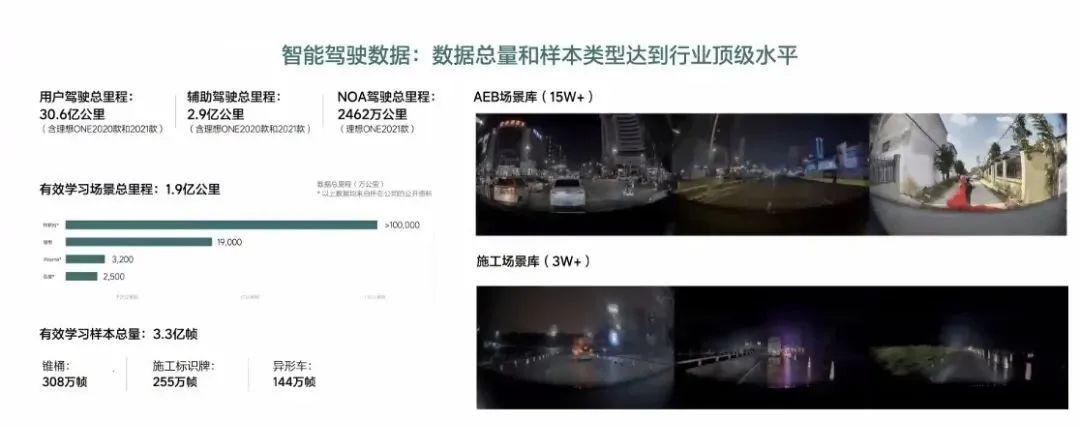
理想目前的智能駕駛數(shù)據(jù)情況
“我們車端有4DBEV框架的AI模型和自主學(xué)習(xí)的算法驗證框架;在云端有快速的自動數(shù)據(jù)標(biāo)注和算法訓(xùn)練的體系。由此,車端和云端有效結(jié)合進(jìn)行算法迭代,從而實現(xiàn)更高級別的自動駕駛。“
在采 訪結(jié)束時,李想就L9后綴的Max到底何意給出了答案。
理想的智能座艙和智能駕駛都將由MAX和PRO兩個版本。L9的智能座艙和駕駛系統(tǒng)都應(yīng)用MAX版本,因此后綴X。“當(dāng)兩個PRO組合的時候我們的車型就叫做PRO,特別簡單。”
——END——
來源:第一電動網(wǎng)
作者:電動汽車觀察家
本文地址:http://m.155ck.com/kol/178173
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請聯(lián)系admin#d1ev.com(#替換成@)刪除。


相關(guān)圈子


先估價再買車,買的放心開的安心
您的詢價信息
已經(jīng)成功提交我們稍后會聯(lián)系您進(jìn)行報價!


大牛說專欄作者")






 京公網(wǎng)安備
11010502033163號
京公網(wǎng)安備
11010502033163號