分享 | 郭繼舜整理 | 閆小瑜
6月8日晚,「X研講」第一季第一期邀請均勝電子副總裁郭繼舜分享,本文來自郭繼舜分享的部分內容節選。
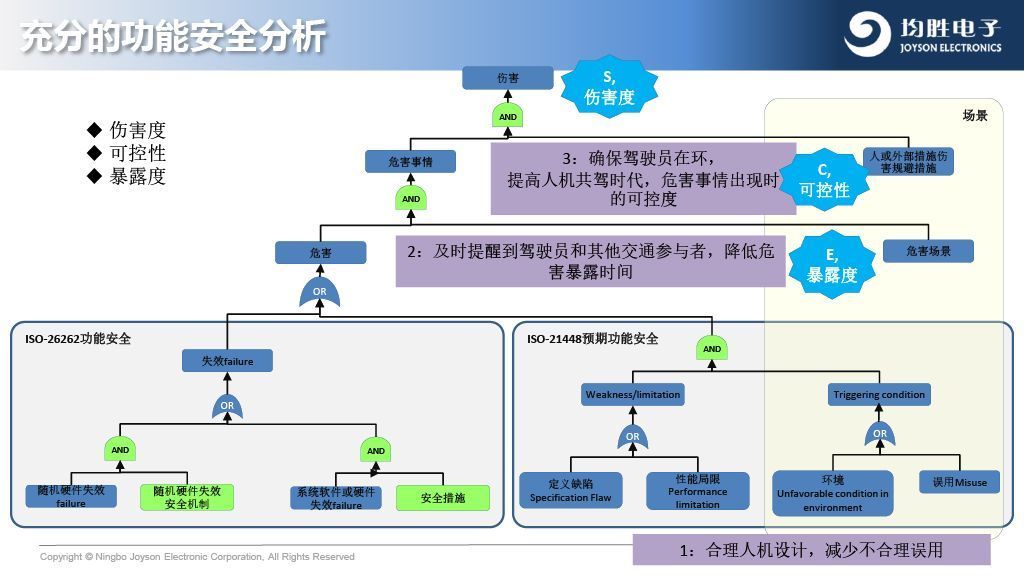
核心觀點:
產品定義包括目標、邏輯、結構、功能,系統設計包括功能模塊、實體設計、邏輯關系、核心架構。
我們要為可能的所有用戶設計安全的產品,為目標用戶設計舒適度更高的產品。
L3智能駕駛不是一個好的產品形態,L2++及L4將長期共存。
首先,要知道產品定義是做什么,系統設計怎么做。
產品定義與系統設計是相輔相成的。在實際過程中發現無法孤立地先做產品定義,再做系統設計,特別是在軟件定義汽車階段,原因在于有非常多的想法和創意。
例如一鍵超車功能功能,它可能是一個比較好的產品定義,但它在系統設計方面非常難做,尤其是在安全性、人機交互、穩定性等方面。
因此,我們將產品定義和系統設計做成一個循環,一方面由產品經理提出產品定義,另一方面系統工程師和工作安全工程師對于系統設計做一個推演之后重新回溯給產品工程師,最后形成可行方案。
那么如何設計智能駕駛產品?
運用馬斯洛需求理論,從底層的生理需求到安全需求、社交需求、尊重需求、自我實現需求,最終實現讓智能駕駛產品有持續成長性。
產品定義之后是系統設計。
需要注意的是,系統設計在生命周期里處在相對前期,后續可能還有OTA 升級,但在 OTA 升級過程中,我們更多時候是在前期進行充分的硬件預埋和接口預留。同時需要重新走一遍系統設計過程。
在智能駕駛產品生命開發過程中,分為三個方面的需求:
需求挖掘,目的是讓系統工程師看得懂;
系統需求定義,主要是讓測試人員看得懂;
系統架構設計,讓程序員看得懂。
不懂產品設計的系統架構師不是好的程序員。
程序員想要了解產品功能是如何實現的,需具備一些系統架構和軟件架構的知識。系統架構工程師要了解產品設計,包括用戶心理、人機交互的一些認知和分析。
智能駕駛功能設計的第一性原理:盡量減少人在路上(車上)的時間,如果做不到,那就讓他輕松快樂。
TJA就是L2,TJP就是L3,并不太合理,全速功能不可少;
高級別泊車更能提升用戶體驗,因為低速封閉場地,更容易和行車級別錯配搭載;
L4大規模應用時,內容生態會有新的增長支撐。
原則1:信息充分和信息過載
L4 級Robotaxi車可以充分展示路況,用戶獲得的行駛信息越多,安全感就會越強。這個方式同時也達到了法律免責的目的,就是已經把相關信息都給到了人。但容易出現信息過載。
例如,用戶經常抱怨車的預警功能聲音過于頻繁,系統顯示退出時紅色太刺眼等系列問題。換言之,人們理解結構化信息需要一個思考的過程,太多的結構化信息會讓人們焦慮。

所以我們在不斷地尋找用戶的信息充分認知和信息過載之間的一個平衡點。
原則2:為什么樣的用戶設計?
為可能的所有用戶設計安全的產品。傳統汽車在設計智能駕駛功能時,都把智能駕駛功能盡量設計得不那么容易被誤觸發。
為目標用戶設計舒適度更高的產品。特斯拉只為目標用戶設計服務,比如都是相對容易嘗鮮并有一定認知能力的年輕人,設計一些功能安全考量相對不那么嚴格的產品。
所以,我們該用什么樣的思考維度去設計這個產品,也是現在面臨的問題。
在保證安全的前提下,我們要學習特斯拉的設計理念和設計方式,從目標用戶著手去進行系統設計。
原則3:人工智能的智能駕駛的恐怖谷理論
隨著人工智能體越來越像人,人們對于它的好感度會增加。比如工業機器人,它的好感度就不如像人的機器人。但是,隨著機器人越來越像人,越來越逼近人,也會讓人產生一些恐懼。
對于智能駕駛而言,從 L0 開始其實不算逼真性,應該叫做智能性,就是機器營造的安全感和人類安全感之間的一個對比。從 L0開始,那么它的智能性不太夠,主要是幫助人來剎一腳,AEB就是典型的L0 的功能。L1能夠減少人的一部分的這個疲勞感。
我認為L2 ++是比較好的一個狀態。
L3會造成人們對這個系統不信任,因為當他失去注意力的時候,他認為把自己的生命安全交到了一個還不完備的系統手里。同時法律責任以及對于車輛的管理權在人和車之間不斷地切換。一旦報警,人就要接管,然后一旦正常行駛車還要再去控制車輛。
所以 L3 現在是一個大家信任度最低的狀態,到了 L4、L5 其實它的狀態會提升。
人工智能的智能駕駛恐怖谷理論存在兩種兩種矛盾:
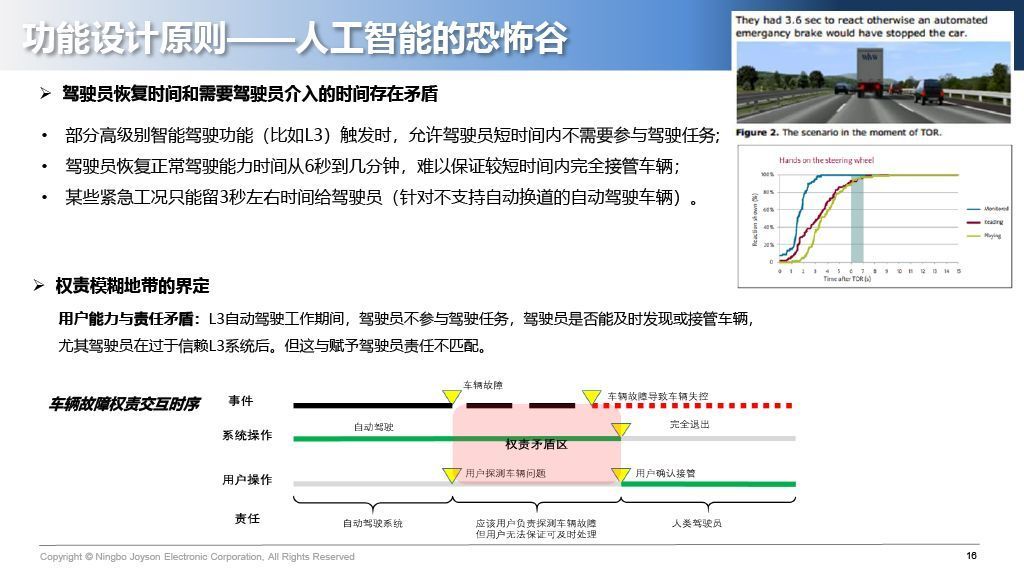
一是,駕駛員恢復時間和需要駕駛員介入的時間存在矛盾。
部分高級別智能駕駛功能(比如L3)觸發時,允許駕駛員短時間內不需要參與駕駛任務;
駕駛員恢復正常駕駛能力時間從6秒到幾分鐘,難以保證較短時間內完全接管車輛;
某些緊急工況只能留3秒左右時間給駕駛員(針對不支持自動換道的自動駕駛車輛)。
二是,權責模糊地帶的界定。
用戶能力與責任矛盾上,L3自動駕駛工作期間,駕駛員不參與駕駛任務,駕駛員是否能及時發現或接管車輛,尤其駕駛員在過于信賴L3系統后。但這與賦予駕駛員責任不匹配。
原則1:硬件復用的設計原則
功能安全只能向下兼容;
算力資源的使用,重要度大于時序
原則2:易用和安全的天然矛盾
現階段,功能上能實現的AVP,在大規模應用過程中往往會被設計成HPA。
智能駕駛的降級必然、兜底必然和收斂必然是我們最近討論出來的結果。
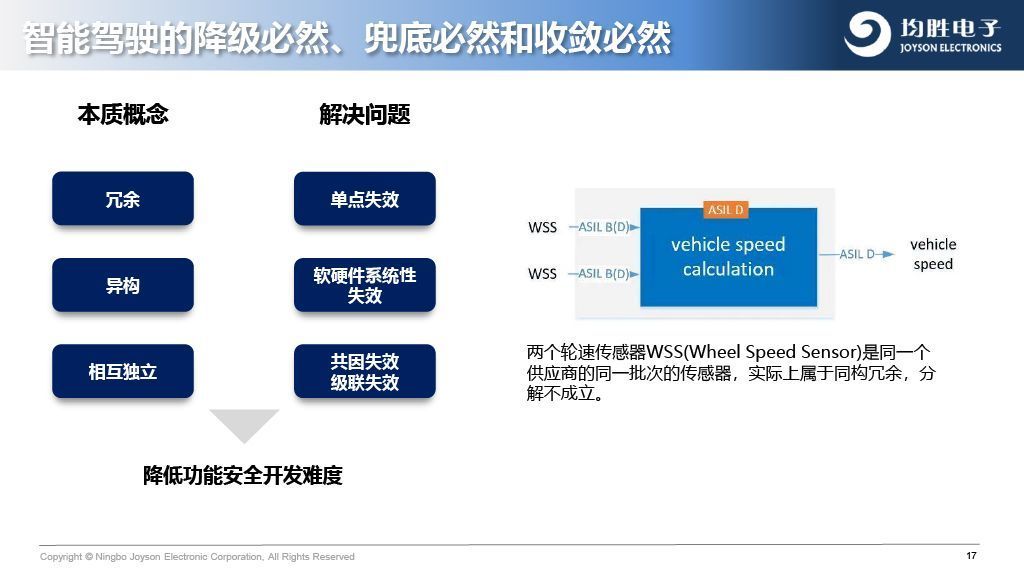

這三者本質是冗余、異構、相互獨立的系統,主要解決的是單點失效、軟硬件系統性失效、公因失效等問題。誠然,這三者的最終目的是降低功能安全開發難度。
結論:
1. 即使OEM定義和主導開發,Tier 1依然不會沒有生存空間,不同OEM的協同方式是不同的;
2. 做全棧,但不見得賣全棧;
3. 從經濟的角度來說,Tier 2做交付是不劃算的。
OEM、Tier 1、Tier 2它們是如何賺錢的?
OEM:用標準化模塊做個性化邏輯連接。
Tier1:用模塊化產品提供標準化服務。
Tier2:用標準化高技術產品形成壁壘。
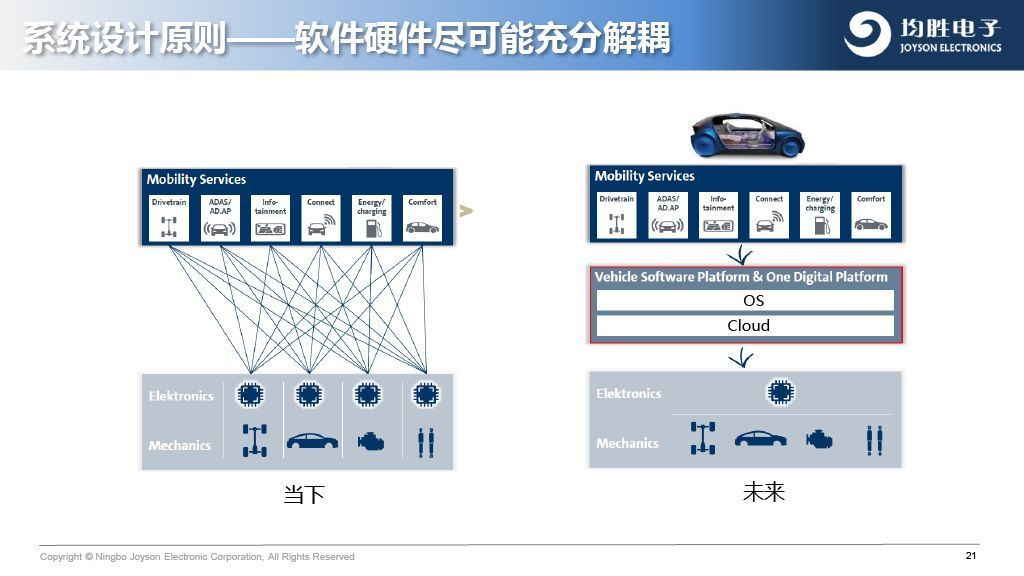
以NVIDIA 為例,軟硬件盡可能充分的解耦,才能使軟件層部分功能更好地遷移到不同的硬件上。簡言之,硬件平臺化、軟件模塊化,同時軟硬件能夠充分地解耦。
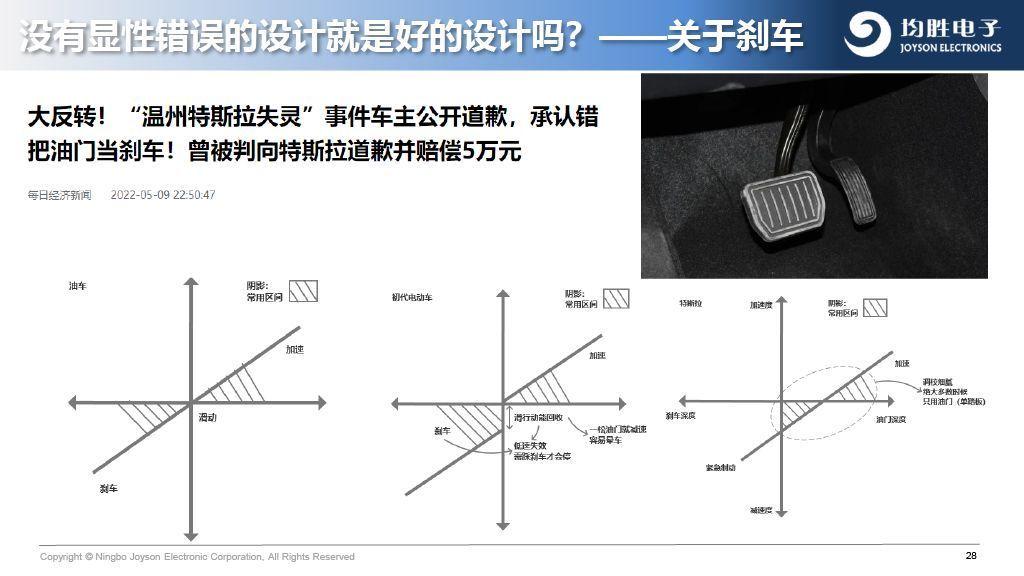
沒有顯性錯誤的設計就是好的設計嗎?
比如關于剎車,前段時間特斯拉車主公開道歉,說承認把油門當成剎車。但問題在于特斯拉是沒有責任的,單踏板模式是否是對的。
在我看來是是因為它的能量回收設計的太明顯了,一松油門就停,使大家已經不會踩剎車了。因此容易讓人造成誤解。
一鍵直達是好的設計嗎?
例如關于智能駕駛使能,是不是一次性開啟一個功能就是好的設計,到底誤觸發會不會有風險?這個是我們后續在功能設計里面應該思考的問題。

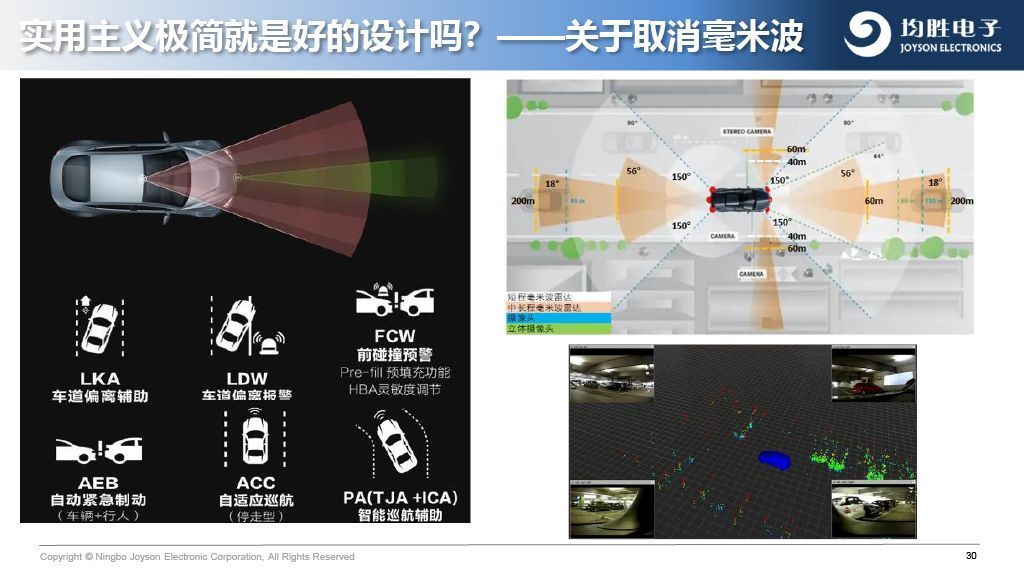
實用主義極簡是好的設計嗎?
例如關于取消毫米波雷達,在 ADAS使用方面主要依靠攝像頭,現在確實毫米波雷達的使用權重很低。因為毫米波雷達對金屬物體過分敏感,可能也不是那么好的一種置信度高的信號。
但是因為傳感器的異構冗余等特點,我們依然認為毫米波雷達不應該被取消,就是激光雷達、毫米波雷達、攝像頭應該充分地在該系統上形成冗余。
來源:第一電動網
作者:HiEV
本文地址:http://m.155ck.com/kol/178294
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!







 京公網安備
11010502033163號
京公網安備
11010502033163號