新勢力們攪渾汽車市場這潭水,也不全是壞事。
最起碼,保守甚至躺平的傳統車企們,也知道時不時地展望一下未來,放下身段去斬獲一些關注熱度了……
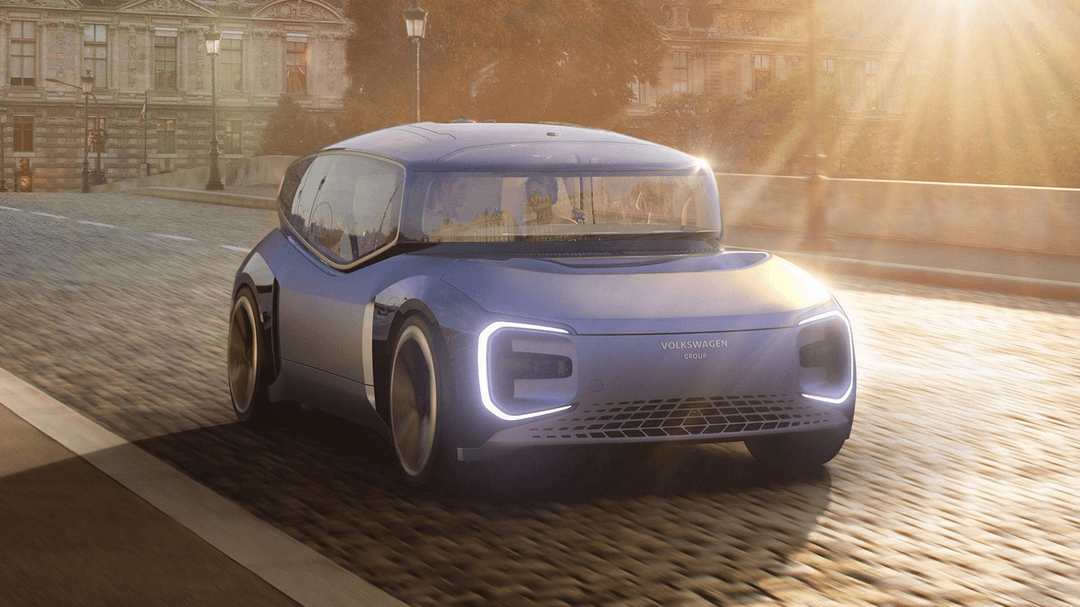
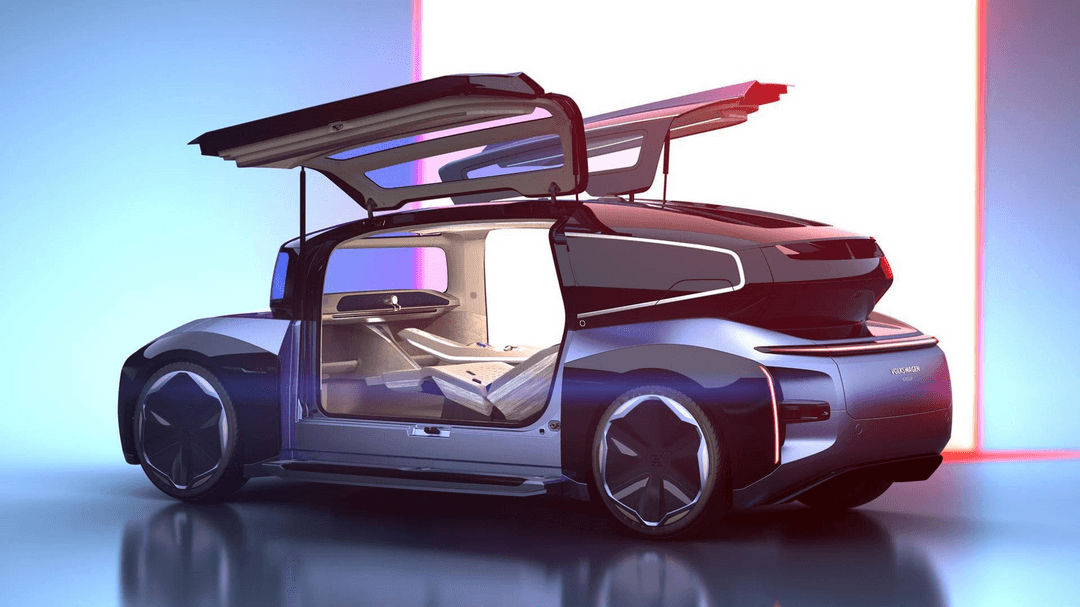
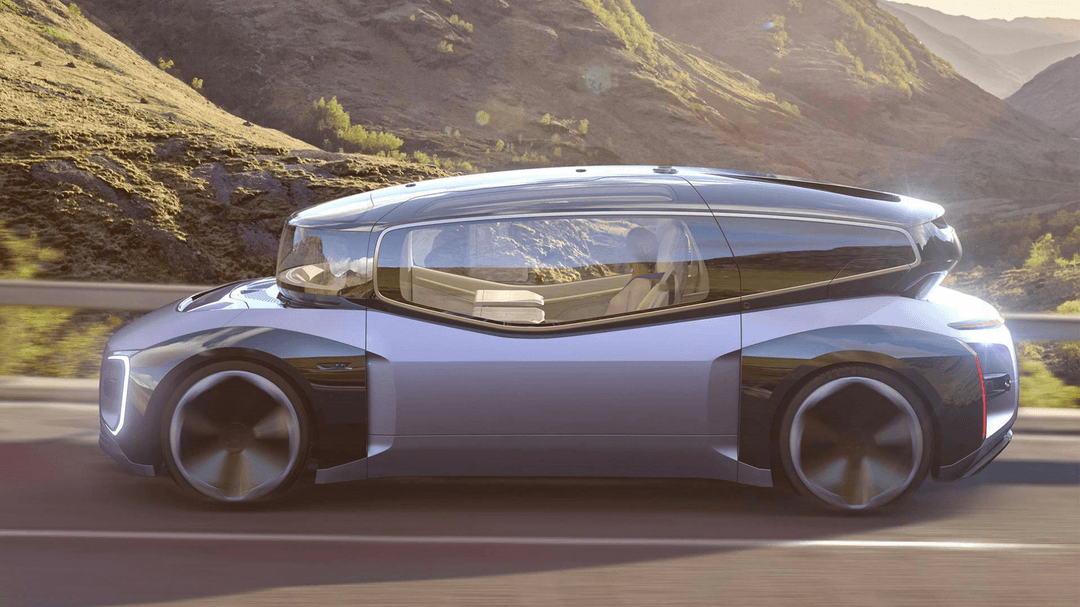
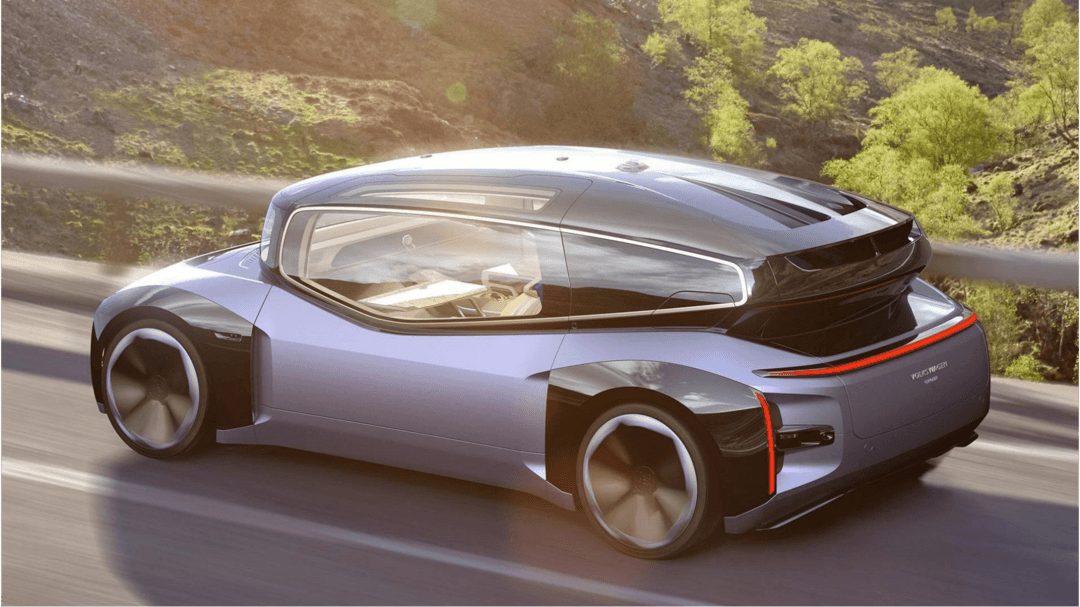
就比如,在智能化技術上已經保守相當一段長時間的大眾,近日發布了一組GEN.TRAVEL的官圖。
零排放、零壓力的出行方式是其主打的展望賣點,L5級別的輔助駕駛和電驅動是技術核心。
那么,大眾想象的這種未來產品究竟還離我們多遠?
技術上,又需要工程師們做出哪些突破呢?
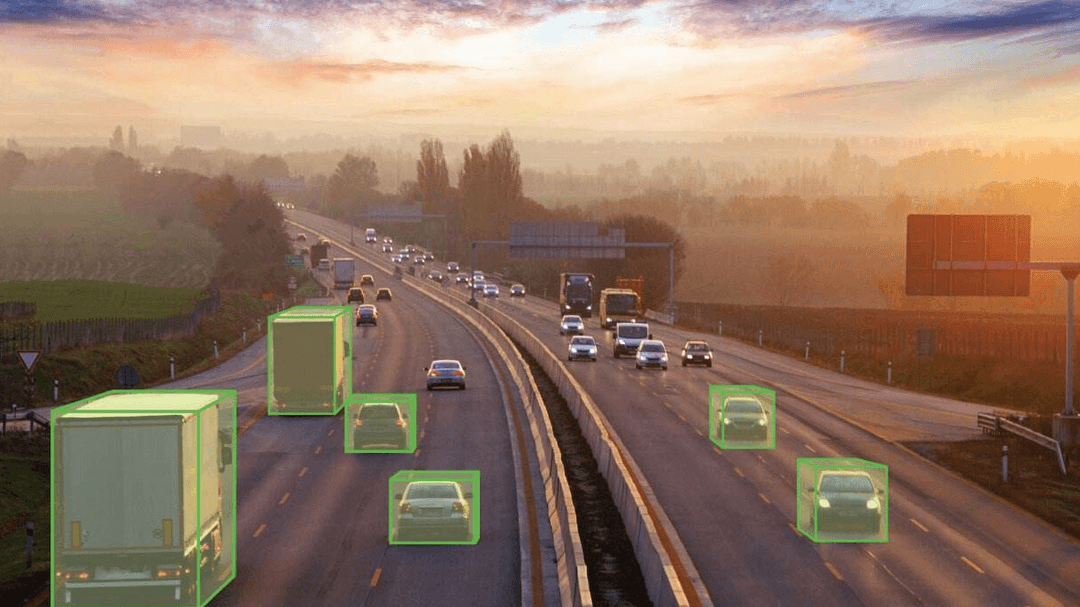
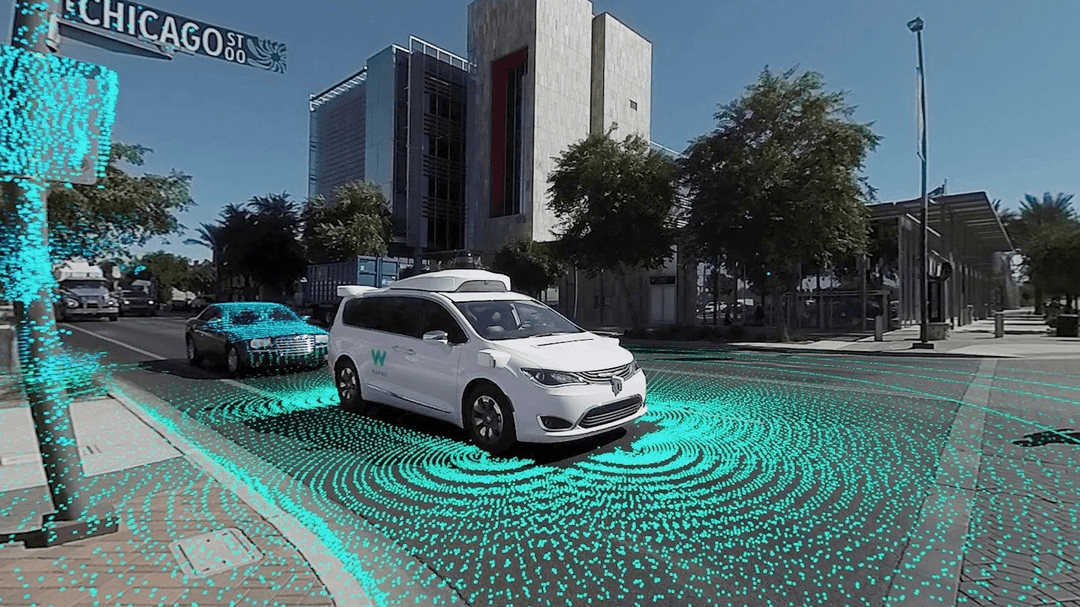
感知,是第一道坎
與真實的人學駕駛證需要視力體檢一樣,如何最大程度地感知環境,仍然是不少車企頭痛的關鍵問題,盡管當下各種雷達和攝像頭等已經在汽車上普及。
這種感知并非簡單地判斷一些相當明顯的環境,對全工況下的環境判斷才是工程師們關注的重點。
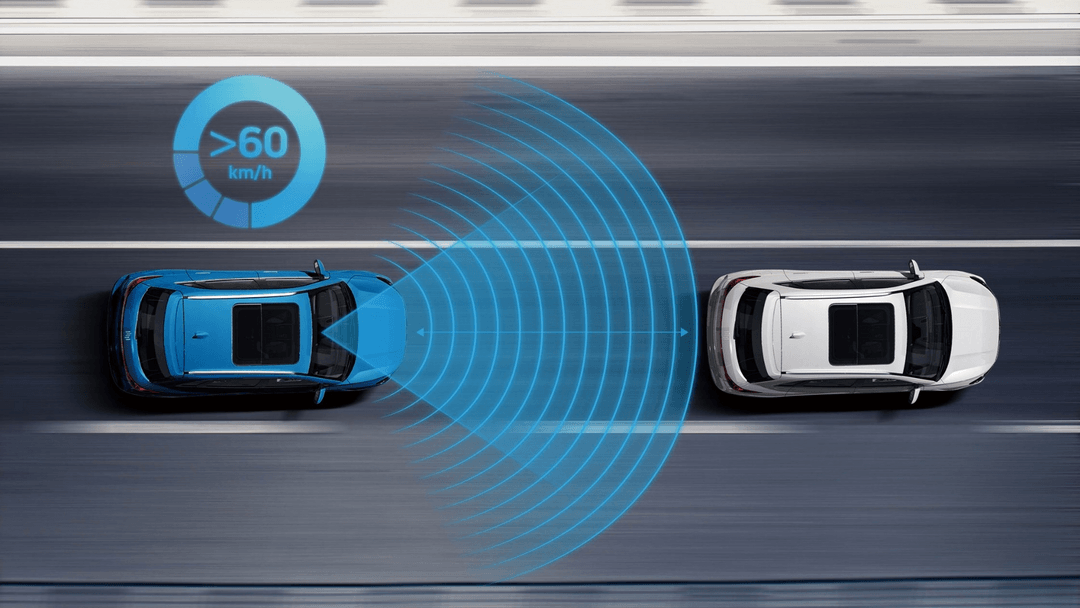
比如,在大雨場景行駛中,以攝像頭為主的視覺方案已經開始概率失效,毫米波雷達成了很好的補充。
又比如,在需要快速做出避障及緊急制動的場景下,激光雷達的優勢又盡顯,傳感器的迭代,顯然是進無止境的過程。
其次,在接收到如雷達、攝像頭、GPS、陀螺儀等多種傳感器信息之后,豐富度是有了,但考慮到有著上限的處理器,如何融合一樣是個不小的坎,畢竟直接無視某一傳感器上報的信息顯然太過不合理,對安全也是不小的挑戰。
算法和平臺,很關鍵
L5自動駕駛的第二點,就是算法。
這點不用過多解釋。
在當前,汽車產品已經喊出了軟件定義汽車的口號,在接收到關鍵信息之后如何保證安全和誤報率的情況下做決斷一樣需要很多算法工程師“禿頭”,一定程度上,這點也是當前算法工程師動輒百萬年薪的因素之一。
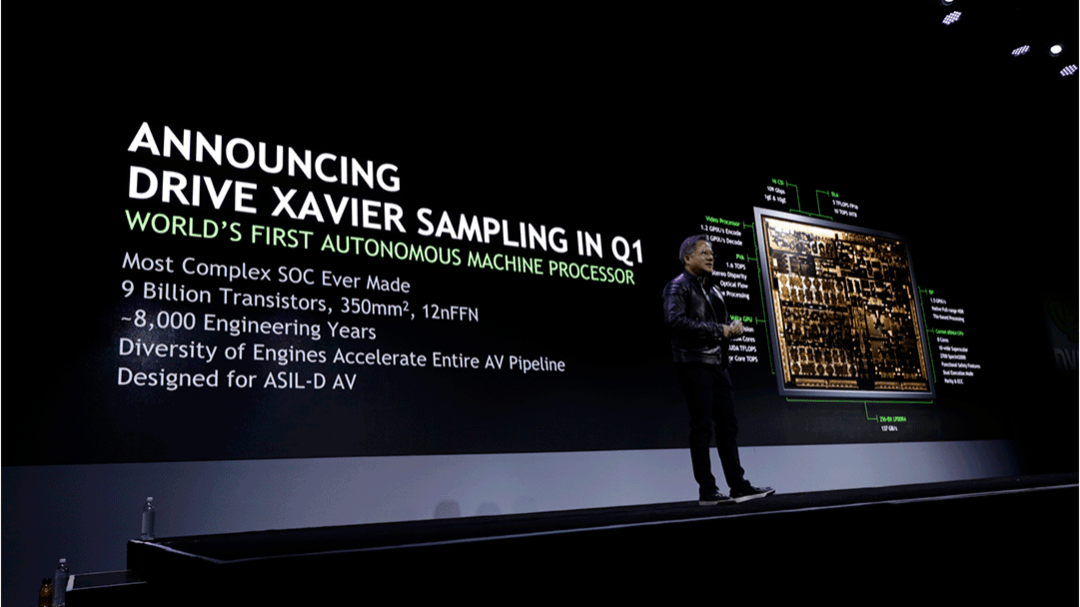
另外,算法完成之后,如何在處理器上讓這些代碼跑起來同樣是OEM頭痛的重點。
無論是英偉達的計算平臺,還是國內的地平線,算力一直是自動駕駛的瓶頸。
為了無限增大場景覆蓋度,代碼可以有很多行,但不管是神經網絡還是其他的智能算法,總是要有算力來支撐,這些理解起來并不難。
帶頭吃螃蟹?是要有膽量的
最后,即便是算法開發完成,硬件平臺也在成本的支撐下達到門檻,感知系統也通過堆料做到了豪華。
但是否敢放到市場,也是極其考驗膽量的,不光是對車企,對政府來說也是一樣。
當前自動駕駛大多數卡在L2級別的關鍵是,在輔助駕駛過程中出了事故責任人在駕駛員,L3則是輔助駕駛系統開始承擔部分責任,在L4就已經是輔助駕駛系統承擔全部責任。
也就是說,一旦L4或者L5級別的智能駕駛產品遇到相當特殊的場景而發生事故之后,車企需要對所有損失買單,這對任何一個品牌來說都是堪稱存亡的挑戰,有這種底氣的OEM顯然相當有限。
同時,敢于改變這種判罰標準的政府智庫,想要改變的壓力也是相當龐大的。
結束語
作為汽車行業的一員,對于大眾GEN.TRAVEL暢想的“未來”,顯然我們對其成為現實是持正向態度的。但其最終落地的時間點,可能要比我們想象的長得多,一方面是技術的開發,一方面是利益和責任的權衡,何時能達到所有的完美?可能要到5年或10年之后,才能有答案。
來源:第一電動網
作者:二師兄玩車
本文地址:http://m.155ck.com/kol/186061
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!









 京公網安備
11010502033163號
京公網安備
11010502033163號