在剛剛召開的上海車展上,智能化已然成為全場關注的焦點。
無論是合資品牌、自主品牌,還是國內(nèi)新勢力,都在借這個窗口展示其智能化發(fā)展成果,不僅有海量新產(chǎn)品發(fā)布,還帶來了不少改款車型,完美呼應了這次車展「擁抱汽車行業(yè)新時代」的主題。
與此同時,這也帶動著智能駕駛供應商們紛紛「煥新」,激光雷達廠商就是其中之一。
這里有一大背景是,激光雷達正在迎來上車大爆發(fā)。
2022 年,禾賽、速騰、圖達通、探維科技等頭部激光雷達公司紛紛拿下主機廠的項目定點,宣告行業(yè)正式進入量產(chǎn)階段。
隨之而來的挑戰(zhàn)是在滿足性能指標、車規(guī)可靠性和量產(chǎn)交付質(zhì)量一致性等諸多前提約束下達成成本控制目標,尤其是在車市價格戰(zhàn)異常激烈、智能駕駛開始回歸理性的當下,激光雷達廠商被要求「做的更多」。
「現(xiàn)在要求激光雷達不僅做到『能用』(過車規(guī)),更要『好用』(性能強),還要『用起來便宜』,」一位業(yè)內(nèi)人士表示,這就像是一個充滿悖論的「不可能三角」,怎么也解不開。
探維科技 CEO 王世瑋博士發(fā)布「光變計劃」
有難題就有破局者,作為最具前瞻性的激光雷達公司,探維已經(jīng)將不可能變成可能,這次車展上,探維重磅發(fā)布了「光變計劃」,提出用光改變『視』界,基于ALS 平臺、硬件前融合技術(shù),打造極致性價比,實現(xiàn)感知一體化,支持車企完成中高級別的自動駕駛。
車展現(xiàn)場,探維還公布了與第二家乘用車客戶的量產(chǎn)新能源平臺項目。
01、「光變計劃」:算法、硬件、場景全打通,最終實現(xiàn)感知一體化
4 月 19 日,探維科技 CEO 王世瑋掀開了「光變計劃」的神秘面紗。
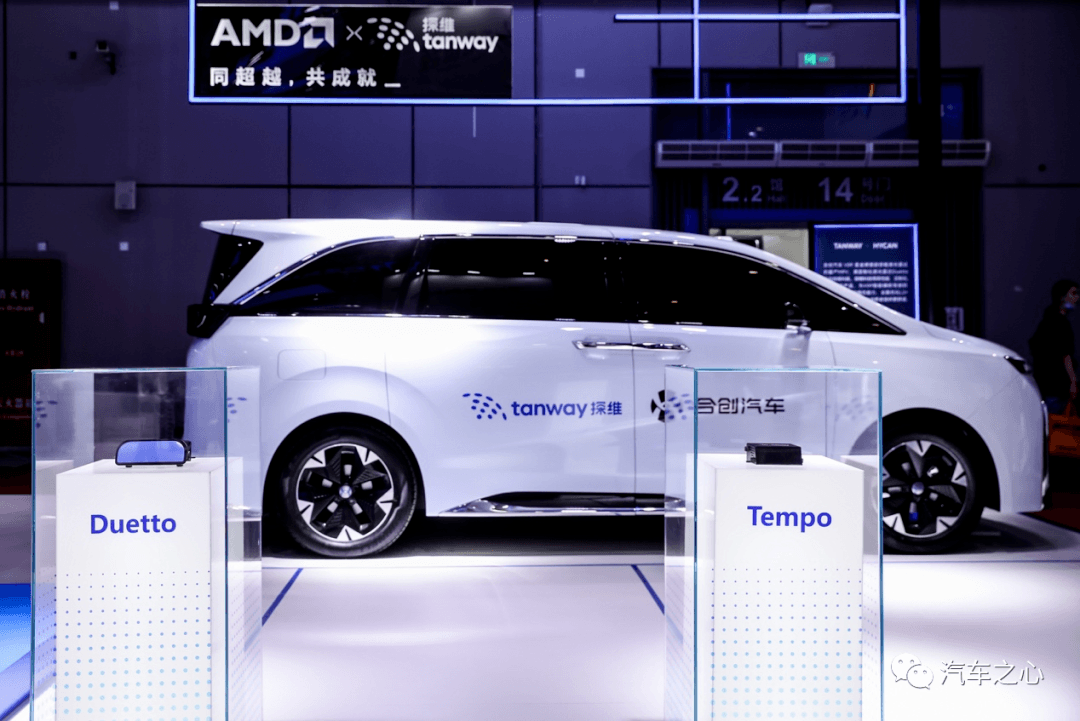
汽車之心了解到,「光變計劃」由三條產(chǎn)品線組成,分別為Tempo 系列、Duetto 系列以及New Scope 系列。
旗艦級車載激光雷達 Tempo
其中 Tempo 系列主打「超高清、超視界」,這是一款等效 192 線的混合固態(tài)激光雷達,擁有120°×25°的超寬視野,和 0.16°×0.13°的超高分辨率,最遠探測距離達到 300 米,能適應 L2+/ADAS,L4 Robotaxi/Robotruck,V2X 車路協(xié)同,智慧城市等的需求;
車載激光雷達Duetto
Duetto 系列則追求性能與成本的極致平衡,具備 120°×25°的超大視場角,在 ROI 區(qū)域擁有 0.09°x0.19°的圖像級分辨率,同時由于采用單光子器件,極大提升了探測距離,10% 反射率能達到180 米,可用于 L2+/ADAS,L4 Robotaxi/Robotruck 等場景;
New Scope 系列面向補盲場景,提供大視場、高分辨率的感知方案,在 2024-2025 年將以 Flash 純固態(tài)的方案呈現(xiàn)。
Tempo 系列今年將落地3 個定點,在 2024-2025 年將推出下一代 Tempo Pro 智能感知系統(tǒng)套件,性能方面線數(shù)將提升一倍以上,F(xiàn)OV、測遠提升 30%,基于探維點云特性提供圖像前融合算法方案 Smart Sensor Set,后者具備客制化(依據(jù)客戶的視覺方案定制)、跨平臺(不限算法平臺使用)、零遷移成本(LiDAR 方案替換無縫隙)等特性。
此外,Duetto 系列在 2023 年 Q4 搭載合創(chuàng)旗艦級純電 MPV V09 開啟大規(guī)模批量交付,在 2024 年會基于極致平衡的產(chǎn)品戰(zhàn)略,尺寸縮小 50%,單價降至200 美元,在未來還會率先搭載硬件級的圖像前融合系統(tǒng)。
搭載 Duetto 激光雷達的合創(chuàng) V09
全球首款搭載激光雷達的 MPV 合創(chuàng) V09,選擇的就是 Duetto 系列,其遠距離、高精度的探測能力能夠讓合創(chuàng) V09 輕松實現(xiàn)更安全、更舒適的 L2+智能輔助駕駛功能,如高速領航 NOA、LCC、ACC 等,并為高階輔助駕駛功能提供了更全面的保障。
探維三條產(chǎn)品線將在 2025-2026 年匯聚成一個終點——感知一體化解決方案,通過多傳感器軟硬融合以及極致性價比的產(chǎn)品戰(zhàn)略,打造、實現(xiàn)感知一體化。
事實上,在芯片、算法等智能駕駛細分領域,都在朝著更精簡的一體化方向發(fā)展,例如座艙芯片開始和智駕芯片融合,做跨域計算,泊車域控與行車域控兼并,形成行泊一體,甚至艙駕一體,而在激光雷達領域,同樣的事情也正在發(fā)生。
作為給智能汽車提供最底層感知功能的硬件,激光雷達要加速智能駕駛的發(fā)展,不能僅僅依靠改良掃描模式、收發(fā)模組等實現(xiàn),而是必須開啟真正的技術(shù)革命。
感知一體化正是這場革命的主題,激光雷達除了要在分辨率、探測距離等性能方面做好,還需要在結(jié)構(gòu)上與更多的傳感器融合,并優(yōu)化感知系統(tǒng)的整體性價比,最終為客戶提供更好的產(chǎn)品服務和成本。
「系統(tǒng)方案的整合一定會是最優(yōu)解。」王世瑋表示,「探維通過 Tempo pro(搭載 Smart Sensor Set)提供算法領域的融合方案,Duetto 提供硬件領域的融合方案,New Scope 提供場景層面的融合方案,為客戶提供整套感知解決方案。」
目前,「光變計劃」正在結(jié)出「量產(chǎn)之花」,除了合創(chuàng)外,探維在 2023 年 Q1 里程碑式地拿下第二家乘用車客戶的量產(chǎn)新能源平臺項目,預計在 2024 年量產(chǎn)。
02、激光雷達量產(chǎn)「不可能三角」,已經(jīng)被攻破
一直以來,激光雷達行業(yè)存在一個「不可能三角」問題,即感知性能、車規(guī)穩(wěn)定和成本控制三者之間是此消彼長的關系,而不能同時滿足條件。
舉例來說,激光雷達在測距方式上,可分為 TOF(飛行時間)和FMCW(調(diào)頻連續(xù)波)兩種路線,其中 FMCW 在抗干擾能力、信噪比上均高于 ToF 方案,且可獲取多一維度的速度信息,因此理論上來說,感知性能更優(yōu)。
然而,F(xiàn)MCW 激光雷達技術(shù)并不成熟,難以滿足車規(guī)穩(wěn)定,且由于對前端光學器件和后端電子器件要求嚴苛,接收器的整體成本比 TOF 更高,直到目前,市場上也還沒有一家廠商成功將該技術(shù)推向量產(chǎn)階段。
OPA(相控陣固態(tài)激光雷達)也是如此,遲遲未能達到上車的基本工程化要求,成本曲線也不及預期,逐漸淡出主流。
一邊是看似難以破解的行業(yè)「不可能三角」,一邊卻是市場對于高性能、低成本、易量產(chǎn)車規(guī)級固態(tài)激光雷達的急迫需求,探維通過多重創(chuàng)新,成為了其中的「破局者」。
正如前文所說,激光雷達方案可根據(jù)激光波長、測距方案、掃描方式等分為多條路線,探維所做的便是在其中做好取舍平衡。
為了追求車規(guī)級環(huán)境穩(wěn)定性,探維在激光雷達掃描上采用單軸掃描鏡,由于只需在一維方向上掃描,運動部件非常少,由此帶來失效概率很低。
「不過單軸也有很大的問題,需要在控制體積的同時做到『多線』,實現(xiàn) 3D 效果。」王世瑋指出,這需要在其他部分做更多創(chuàng)新。
探維的做法是在收發(fā)模組層采用陣列化的集成器件,通過這樣的方式,將以往激光雷達量產(chǎn)最復雜的調(diào)光程序大大簡化,并具備了無間隙掃描的特性,在探測小物體上能夠做到不遺漏。
滿足了車規(guī)穩(wěn)定和感知性能,探維還在成本上進一步壓縮,自研 TOF 算法和通過芯片化設計,進一步提升系統(tǒng)方案的集成度,降低對高端信號處理芯片的依賴,大幅降低硬件成本。
「在當前高性能、控成本、保證車規(guī)等邊界條件下,探維做出了前向探測激光雷達的最優(yōu)解。」
探維把上述技術(shù)統(tǒng)一到一個叫做Array-based Line Scanning(ALS)的平臺,并基于此打造出無須拼接,就能實現(xiàn) 120°水平掃描,滿足車規(guī)級要求的高線數(shù)混合固態(tài)激光雷達產(chǎn)品,覆蓋了 16 線——192 線。
探維早在 2017 年便確立了 ALS 平臺路線,最早將其應用在混合固態(tài) 3D 激光雷達 Tensor 上。據(jù)了解,Tensor 在 CES 2019 上剛一推出,就吸引了業(yè)內(nèi)的關注,依靠獨有技術(shù)方案和 1000 美元以內(nèi)的高性價比優(yōu)勢,一舉成功殺入強手如云的市場。
而 Tempo 系列和 Duetto 系列也是基于 ALS 平臺研發(fā)而成,并根據(jù)國內(nèi)市場 L2-L3 智能駕駛需求,進行了升級和優(yōu)化設計,例如 Duetto 系列自研設計的收發(fā)與掃描結(jié)構(gòu)組合,可以讓 ROI 區(qū)域達到圖像級分辨率。
此外,Duetto 系列還具備極致平衡、極致性價比的特點,其內(nèi)部通過雙模組優(yōu)化的方式進一步降低了成本,2024 年-2025 年會降至200 美元的價格區(qū)間。
除了在產(chǎn)品設計上打破「不可能三角」,探維在量產(chǎn)制造上也極力尋求新的突破。2021 年 Q4,探維蘇州量產(chǎn)基地投入使用,占地 3000 平米,從來料檢驗、到組裝標定、出廠測試,全部按照車規(guī)級標準打造,實現(xiàn)全自動化,可以在工程領域快速切入車規(guī)量產(chǎn)階段,提速規(guī)模化,保障產(chǎn)品量產(chǎn)質(zhì)量穩(wěn)定與供應鏈安全。
03、硬件級圖像前融合成趨勢,探維率先開啟激光雷達 3.0 時代
隨著智能駕駛往復雜場景和更高階方向發(fā)展,多傳感器融合正在成為行業(yè)的共識。以當前大熱的城市 NOA 為例,激光雷達基本成為玩家們進入這一市場的「標配」裝備。
盡管當前也有號稱用「純視覺、4D 毫米波雷達將要取代激光雷達」的聲音,但從實際表現(xiàn)上來看,激光雷達在探測精度、探測范圍及穩(wěn)定性等多維度,仍然擁有前兩者無可比擬的優(yōu)勢,尤其是在夜間環(huán)境或者遇到異形物等 Corner Case 條件下,能夠比攝像頭和毫米波雷達看得更遠、識別更準確。
王世瑋認為,各個傳感器有不同的環(huán)境適應性,并非存在替代關系,而是優(yōu)勢互補走向融合,為用戶帶來更高的安全屏障和更極致的智駕體驗。
不過,多傳感器融合也分為前融合和后融合。所謂后融合指的是先感知再融合,即攝像頭生成圖像的數(shù)據(jù),激光雷達、毫米波雷達各自生成點云數(shù)據(jù),分別做感知算法,再把結(jié)構(gòu)化的數(shù)據(jù)進行融合,通過系統(tǒng)層作綜合判斷和決策,這種做法容易因為關鍵信息的丟失、誤檢等,給智能駕駛帶來風險。
盡管如此,由于技術(shù)難度較低,市面上絕大多數(shù)融合方案采用的仍是后融合方式。「智能駕駛技術(shù)要走向更成熟,前融合是必然趨勢。」王世瑋在創(chuàng)立探維之初便提出,前融合才更加貼近人類駕駛員感知世界的模式,
不過,要實現(xiàn)前融合并非易事,在開發(fā)中會遇到很多技術(shù)難題,例如與前融合數(shù)據(jù)相適配的感知算法過程中,要通過系統(tǒng)標定達到 100 米外3~5 厘米的融合精度,就十分具備挑戰(zhàn)性。
針對于此,探維并沒有選擇死磕,而是轉(zhuǎn)換了一種解題思路——硬件級圖像前融合。這與探維創(chuàng)始團隊的背景有關,其源自清華大學精密儀器系,早在 2008 年時,就開始研發(fā)用于遙感衛(wèi)星的激光雷達元件,而彼時,他們正是基于前融合的架構(gòu),整合了圖像和激光點云的數(shù)據(jù)。
如今,這一技術(shù)和經(jīng)驗被應用到了智能汽車領域。具體來說,探維直接把圖像 CMOS 器件裝到了激光雷達產(chǎn)品中,同步在固態(tài)發(fā)射和接收系統(tǒng)中接收環(huán)境光和激光回波,在空間上達到 100 米外 3 厘米的融合精度;通過圖像快門和激光觸發(fā),輸出時間同源的數(shù)據(jù),達到微秒級同步精度,由此一下解決了圖像與激光雷達的同步和融合問題。
在硬件級圖像前融合方案下,識別微小物體時,由于激光點云稀疏,主要倚重攝像頭;遠距離探測時,由于圖像能力測距有限,可以用激光雷達實現(xiàn);而在中等距離感知時,攝像頭和激光雷搭配使用,可以達到超過人眼感知的效果。
「相當于在各個傳感器之間建立了一種嚴絲無縫的『時空同步協(xié)作機制』,利用不同優(yōu)勢做好智能駕駛感知。」
這由此也帶來另一個好處:硬件級前融合方案極具性價比,智能駕駛方案商無需投入多余算力,對多傳感器數(shù)據(jù)進行融合修正和補償,此外僅僅依靠一般的激光雷達產(chǎn)品,就能達到十分優(yōu)秀的感知效果。「相當于只用一個 128 線的激光雷達和普通攝像頭,就能夠?qū)崿F(xiàn) 800 萬高清圖像的效果,大大降低了激光雷達上車的成本壓力。」
王世瑋補充道:「前融合方案看似增加了攝像頭,但因為我們整合了硬件,整車的成本例如之前攝影頭單獨要耗費的接口成本省下來了,從而帶動整車成本得到下降。」
硬件級圖像前融合方案更具意義的一點是,開啟了激光雷達發(fā)展的新階段。
探維將激光雷達的發(fā)展劃分為三個時代:
1.0 時代是機械式激光雷達時代,當時激光雷達主要用在自動駕駛汽車(Robotaxi)上充當核心傳感器;
2.0 則是車規(guī)量產(chǎn)時代,也是當前的階段,核心是工程問題,包括過車規(guī)、整合供應鏈降成本等,而在形態(tài)上,「基本上是以混合固態(tài)為主的主雷達來負責前向的遠距離探測,再通過更低成本的補盲雷達去實現(xiàn)車身 360 度的環(huán)視」,探維認為激光雷達 2.0 時代的技術(shù)路線變數(shù)并不多。
真正具備革命性的是 3.0 時代,硬件級圖像前融合方案通過高效準確的感知,進一步提升車載的安全性,能讓用戶明顯感受到激光雷達上車的價值,同時又因量產(chǎn)成本低,大幅擴大了汽車對于這一傳感器的使用,為更廣泛用戶帶來更高階的智駕體驗。
目前,行業(yè)正在明顯收斂朝著激光雷達 3.0 時代演進,而作為行業(yè)唯一具有硬件級圖像前融合技術(shù)的探維,無疑具備了先發(fā)優(yōu)勢。
王世瑋在發(fā)布會上表示,激光雷達的技術(shù)場景在延伸,功能在迭代,價值探索永無止盡,而「光變計劃」就是提前看到趨勢,布局未來,「探維將繼續(xù)創(chuàng)造卓越的激光雷達,改變智能駕駛生態(tài)。」
來源:第一電動網(wǎng)
作者:汽車之心
本文地址:http://m.155ck.com/kol/200784
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經(jīng)成功提交我們稍后會聯(lián)系您進行報價!

大牛說專欄作者")





 京公網(wǎng)安備
11010502033163號
京公網(wǎng)安備
11010502033163號