“想要做好操作系統,就一定要有‘殺手級’的應用。”
2024年3月16日,中國電動汽車百人會論壇上,在談到車載操作系統時,地平線創始人兼CEO 余凱表達了如上觀點。余凱認為,整個行業要誕生大的操作系統必須要依賴殺手級應用,而智能電動汽車時代的殺手級應用目前可見的有兩個:大模型和智能駕駛。

此前業內的常規思路都是以操作系統或者平臺思維去做平臺,但余凱認為,要通過應用來“裹挾”操作系統,只有足夠大的應用才能培養出一個世界級操作系統。
按照這個邏輯順延,余凱認為,在大模型和智能駕駛加持下,中國很有機會在智能汽車的產業發展窗口期誕生世界級的操作系統和計算方案公司。
圓周智行19
基于大模型和智能駕駛 中國有望誕生世界級公司
縱觀電子消費市場,計算方案與操作系統一直都在緊密耦合。PC時代的Wintel聯盟(Windows+Intel)、智能手機時代AA聯盟(安卓和RAM)都是典型的軟件硬件協同的案例。
在智能汽車時代,整個行業都需要思考一個問題:傳統的計算平臺,軟件、硬件以及生態會呈現什么樣的格局?
余凱的答案是,在人工智能和大模型,端到端Transfomer時代,未來自動駕駛跟智能座艙、智能交互不會完全統一,而是走向以AI計算為核心、以AI計算和操作系統作為中臺,然后支撐上面百花齊放的應用,智能駕駛、智能座艙、交互只是上面的應用之一。這時候行業就會誕生一個全新的計算架構和操作系統,過去的架構和操作系統是以軟件為核心,現在是以人工智能計算、以數據流的處理為核心。
在電腦時代,當個人電腦的性能提升到達一定閾值之后,用戶對性能的需求趨于穩定,并不會隨著時間增加。
智能手機同樣存在這樣的規律。當手機性能不能滿足用戶對性能需求的時候,軟件要足夠高的去適配硬件,才能夠去獲得相對的性能競爭優勢;而當性能超越用戶需求時,軟硬件會發生解耦。
微軟Windows支持RAM芯片,Servers支持高通RAM,蘋果macOS跟Power PC結合,macOS支持X86芯片都在呈現這樣的規律。當性能超過需求的時候,軟件就沒有必要去強行捆綁軟件。
余凱認為,從操作系統入手做操作系統很難成功,但是從垂直應用切入去做操作系統就存在這樣的可能性。這樣的案例已經在PC和手機時代反復上演。
PC時代,Office的需求帶來了Windows的成功;手機時代,GMS三件套( Google的Search、Google的Gmail、Google的YouTube)等一系列Google的垂直應用帶來了安卓的成功。這些事實都印證了余凱的觀察,從平臺入手做平臺都做不成平臺,從應用入手做平臺往往有大成。
智能汽車時代要誕生大的操作系統,只能通過應用來“裹挾”操作系統,只有足夠大的應用才能統一操作系統。而大模型和智能駕駛就是兩個有利的抓手。
車企搶跑大模型
目前,不管智能駕駛還是智能座艙,大模型已經是行業共識,整個行業也已經在大模型上加速奔跑。
百度智能云汽車行業解決方案總經理肖猛在百人會上表示,2024年是座艙大模型的元年,語音的滲透花了八年的時間到80%,座艙大模型可能一半的時間都用不了,國內的主機廠今年都會上線座艙大模型的能力,無非強弱之分,2025年國內新車的滲透率會達到80%以上。
在百度自有品牌極越上,百度早已將大模型能力帶上車。理想、蔚來也都已經將大模型帶上車。吉利系極氪、銀河等品牌也明確表示會在今年將大模型能力帶上車。
而在智駕大模型上,行業的步伐并沒有那么快。
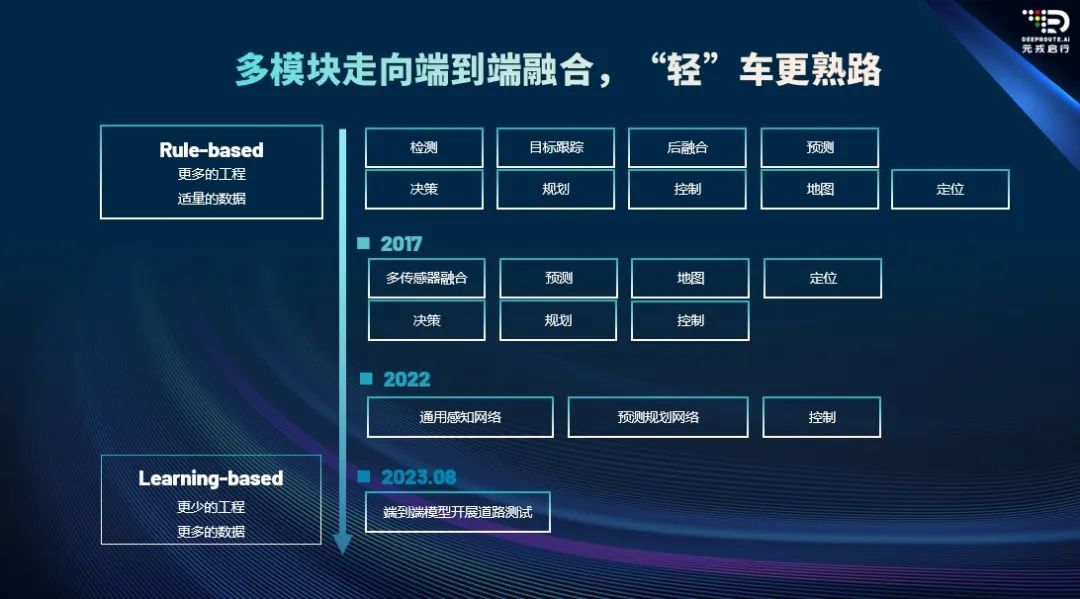
目前國內智能駕駛系統仍然采用模塊化模型,將感知、預測、規劃分別為三個獨立的模型。每個模型的技術棧差異較大,處于下游的規劃模型需要依賴工程師編寫大量代碼去制定行駛規則。在模塊化的技術架構下,信息的傳遞會出現減損,系統的維護難度大,無法從容應對復雜路況。
端到端大模型的思路是將感知、預測、規劃三個模型融為一體,無需程序員編寫冗長的代碼去制定規則,而是用海量數據去訓練系統,賦予機器自主學習、思考和分析的能力。并且端到端模型不會出現信息傳遞減損,能夠更好地處理復雜的駕駛任務,解決了模塊化模型存在的所有“痛點”。
雖然整個行業還處于比較初級階段,但頭部企業依然是卷字當頭,并且出現了多個“業內首個”的有趣現象。
百人會上,小鵬汽車董事長何小鵬表示,今年二季度,小鵬汽車將實現 “AI大模型上車”,官方稱它會是汽車行業首個量產落地的車用人工智能和車用認知引擎。
何小鵬希望通過大模型的通用化能力降低自動駕駛的綜合成本,惠及小鵬旗下聚焦10-15萬元的第二品牌。
自動駕駛公司元戎啟行CEO周光表示,智能駕駛端到端模型將會成就一位“超級AI司機”,元戎啟行已經將端到端模型適配到量產車上,該批量產車將于今年投入消費者市場。元戎啟行是國內第一家能夠將端到端模型成功上車的人工智能企業。
與元戎啟行不同,毫末智行CEO顧維灝表示,毫末在以循序漸進的方式落地大模型,此前毫末發布了行業首個自動駕駛生成式大模型DriveGPT雪湖·海若。
顧維灝介紹,毫末自動駕駛會在云端實現感知大模型和認知大模型的能力突破,并將車端各類小模型逐步統一為感知模型和認知模型,同時將控制模塊也 AI 模型化。隨后,車端智駕系統的演進路線也是一方面會逐步全鏈路模型化,另一方面會逐步大模型化,即小模型逐漸統一到大模型內。然后,云端大模型也可以通過剪枝、蒸餾等方式逐步提升車端的感知能力,在通訊環境比較好的地方,大模型甚至可以通過車云協同的方式實現遠程控車。最后,在未來,車端、云端都會是端到端的自動駕駛大模型。
在大模型能力上,車企們都在加速狂飆。
智能駕駛從好用到愛用還有距離 但行業前景光明
而在輔助駕駛方面,整個行業也在快速上量。2023年輔助駕駛的裝配率已經超過50%。其中NOA高等級自動駕駛在20萬到30萬級裝配率也在不斷提升。何小鵬表示,今年將會把高等級自動駕駛帶向15萬級別。
隨著技術的不斷演進,高級輔助駕駛裝配率朝著100%去演進是必然趨勢。
但必須承認的是,今天的高等級自動駕駛還存在很多問題:成本高和體驗差是消費者較為直觀的兩個反饋。
余凱提出了智能駕駛技術的3個衡量標準,分別是可用、好用、愛用。
他認為,現階段高速NOA已經跨越了可用,來到好用階段。因為在高速以及高封閉的城區道路,系統基本上可以做到全程無接管,現在已經到好用或者剛到好用的階段,但是不是消費者愛用,恐怕要打一個問號。
而在城區智駕方面,目前整個行業還在攻克可用難題。何小鵬提到,城區自駕有可能鬧事區100公里接管10次都有可能,技術仍處于初始階段。
智駕系統可用與成本、速度、接管率等指標強相關。但是好用要與用戶的真實使用需求掛鉤。比如在上班早高峰時間,如果輔助駕駛做不到安全,效率和體驗,那就不能稱之為好用。因為用戶上班要趕時間,但又不能因此犧牲安全和體驗。屬于典型的既要、又要、還要,如果有其中一項不滿足,智能駕駛就談不上好用。
過去智能駕駛的技術開發主要遵循兩個邏輯:擴大ODD范圍和無人駕駛。
盲目擴大ODD范圍,不注重質量帶來的一個問題就是智能化水平低下;而在等級足夠高的無人駕駛方面,系統又會被限定在一個固定區域,比如Robotaxi。
目前整個行業需要攻克的難題是通向全場景的高階自動駕駛。自動駕駛水平既要上限足夠高,又要ODD、運營領域足夠寬。
沿著這個邏輯,余凱認為,下一代駕駛系統應該從三個維度來衡量:標準場景的通過率、通行效率、駕駛舒適性。
目前整個行業高階自動駕駛在安全性上已經沒有太大,下面一步就是舒適和擬人的問題。
地平線的解題思路是更先進的軟件開發能力和軟硬件協同能力。
2023年,地平線發表了研究界第一個端到端大模型的自動駕駛模型UniAD;最近,地平線又提出了Sparse4D算法,彌補傳統的BEV算法的不足。
地平線希望通過這些軟件這些算法的創新能力不斷設計創新的計算平臺架構,使硬件架構能夠高效支持新一代軟件算法。同時,軟件算法全棧的研發也會去支持車企多快好省地開發高階自動駕駛系統。
反映在產品端,地平線今年會推出基于全新技術架構打造的征程6系列計算平臺,并且基于它打造高階智駕樣板間。
在期待統一操作系統之前,賽道里的所有玩家需要先跑贏智駕和大模型的戰役。
來源:第一電動網
作者:圓周智行
本文地址:http://m.155ck.com/kol/223028
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!






 京公網安備
11010502033163號
京公網安備
11010502033163號