我之前在專欄文章:進軍Level 3,奧迪A8自動駕駛功能剖析中深度解讀過全新奧迪A8 L3級別的自動駕駛技術。除了自動駕駛功能外,奧迪A8L還有一些主動安全領域的黑科技。今天我從技術的角度來討論一下這些黑科技是如何實現的。
安全主要分為主動安全和被動安全;被動安全是指事故發生后保證乘客安全的措施,如安全帶、氣囊;主動安全是指在事故發生前,通過一系列的預警或預防措施,避免事故發生或降低事故的嚴重性,最常見的就是ESP。
奧迪A8L的具有多項主動安全技術,這里就不一一列舉了,我個人比較關注的技術有三種:
智能車身平衡系統
開門預警系統
夜視系統
奧迪A8L傳感器配置解讀
在解讀主動安全技術前,需要先對奧迪A8L的傳感器配置方案做一個簡單的介紹,這是后面技術解讀的基礎。下圖列出了全新奧迪A8L上的7種核心傳感器。

沒有對比基本看不出好壞。以下是市面上競品車型的傳感器配置對比圖,通過對比可以看出一些端倪。
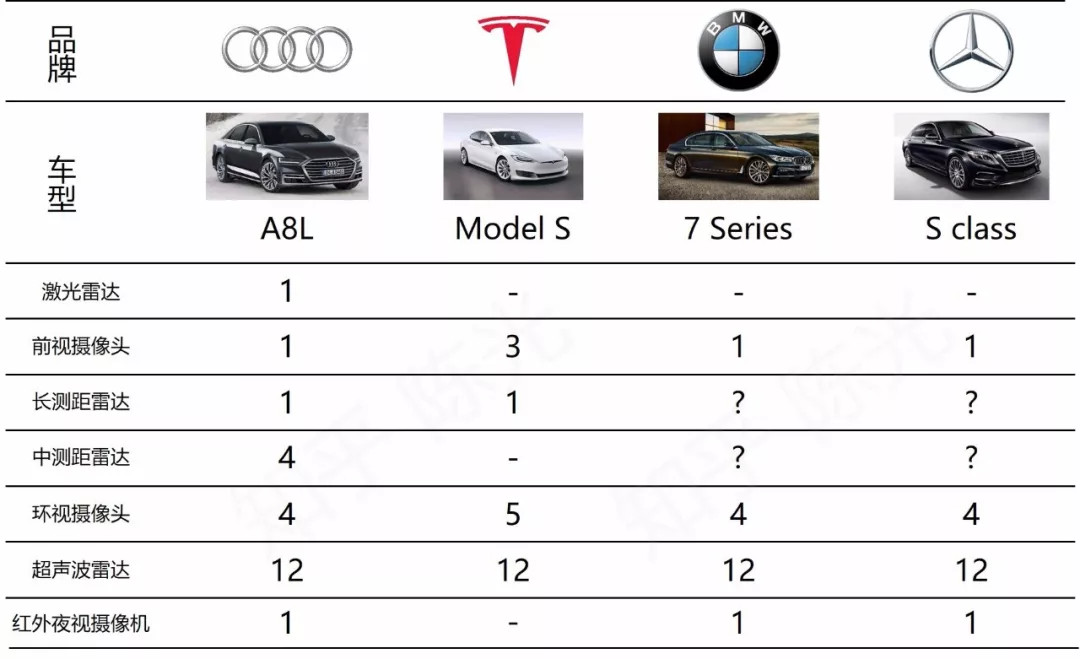
從傳感器配置上可以看出,奧迪A8L的傳感器配置是所有量產車型中最為豐富的,不僅有完備的長短距離的毫米波雷達和前置攝像頭,以及復雜路況自動駕駛不可或缺的激光雷達,還有和主動安全息息相關的4路高清環視攝像頭、超聲波雷達和紅外夜視攝像頭。
與自動駕駛技術強相關的傳感器分別是激光雷達、前視攝像頭、長距離雷達。剩下的四種傳感器——角雷達、環視攝像頭、超聲波雷達和紅外夜視攝像機是奧迪主動安全技術必不可少的元素,也是后文的主角。
智能車身平衡系統
智能車身平衡系統的官方描述是這樣的:如即將發生側面碰撞,被撞擊一側的車身瞬間抬高最多80毫米,以更堅固的底盤部分承受撞擊。
看個視頻能有更為直觀地了解。(視頻大小:4M)
智能車身平衡系統這個概念,我只在幾年前的汽車創意比賽中見過,沒想到奧迪能這么快地將其技術實現且應用在量產車上。目前應該還沒有第二家車廠將此技術投入到量產中。
智能車身平衡系統需要感知系統提前對汽車側面撞來的障礙物做感知。從奧迪A8L的傳感器配置來看,僅有兩款傳感器能夠檢測車輛側方的障礙物,分別是超聲波雷達和環視攝像頭。它們的感知范圍如下圖:

通過觀察超聲波波雷達和環視鏡頭的感知范圍,可以看出超聲波雷達僅能感知到前后輪處的障礙物,而正側方撞來的障礙物只有環視攝像頭能檢測到。
有人會有疑問,圖中的環視感知范圍如此小,是否來得及檢測?
其實環視攝像頭所用的鏡頭都是魚眼鏡頭,魚眼鏡頭意味著通過該相機采集到的圖像范圍是足夠大的,真是的感知范圍比圖中所繪制的大很多。只不過魚眼圖像存在畸變,會造成計算障礙物距離、速度不準確等問題。如下圖所示,安裝在左右后視鏡下方的左右側環視攝像頭所拍攝到的畫面,地下的棋盤格是由多個相同大小的正方形組成的。
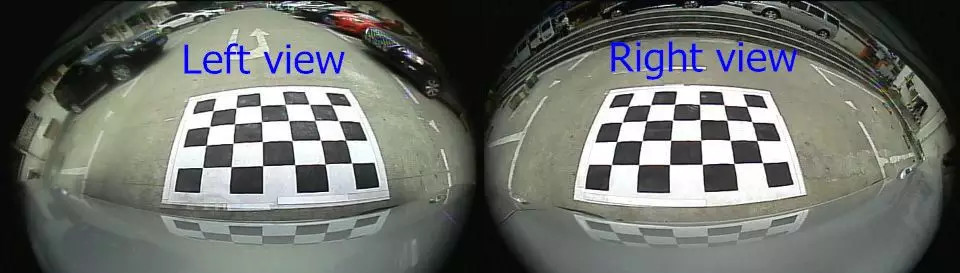
由圖可以看出,左右側的魚眼圖像至少可以檢測到20米外的障礙物,因此當側方有障礙物(尤其是汽車這種特征明顯的障礙物)撞過來時,對系統來說有足夠的檢測和反應時間,做出保護車側面的提升動作。

總的來說,這項技術的實現無論是對環視圖像的感知技術,還是對車身控制的及時性都有較高的要求。奧迪A8L所使用的域控制器zFAS,不僅要實現復雜的L3級別的自動駕駛功能,同時還是支撐各種主動安全技術的感知能力。不得不說zFAS確實是一款計算能力十分強大的域控制芯片。
開門預警系統
開門預警是一項能極大提升乘客“安全感”的功能,作為豪車,乘客當然不希望開門下車時發生意外。
開門預警系統所依賴三種傳感器:后向角雷達、超聲波雷達和環視攝像頭。它們的感知范圍如圖:

開門預警系統針對不同的障礙物,所用到的傳感器是不一樣的。
汽車等高速障礙物
對于汽車等高速運動的障礙物,需要有足夠高的測距和測速精度才能保證預警的準確性和及時性。因此針對此類障礙物,需要感知范圍足夠遠,且距離測量精度足夠高的后向角雷達。
后角雷達的感知范圍和感知原理如下動圖所示:

后向角雷達實際上是頻率為24GHz的毫米波雷達。毫米波雷達有著對金屬、運動物體極其敏感的特性,因此像汽車、摩托車這種金屬質感明顯的障礙物,用角雷達的檢測效果是極好的。
有關毫米波雷達的更多介紹,可參看本公眾號之前發布的文章無人駕駛技術入門(七)| 量產必備的毫米波雷達。
行人、自行車等低速障礙物
對于行人、自行車這些低速的障礙物,后巷角雷達可能存在漏檢的情況。為了確保近處的障礙物依然能夠被準確檢測,需要依賴前面提到的兩款傳感器——超聲波雷達和環視攝像頭。
安裝在汽車后保險杠上的4個加上車身后側面的2個超聲波雷達,即可完成汽車后0~2.5米的感知范圍需求。當運動中的行人經過此區域時,系統有足夠的時間告知乘客汽車后方有障礙物靠近。
對于超過2.5m的近距離障礙物,比如自行車等低速障礙物,可以通過后向的環視攝像頭進行檢測。安裝在后向的環視攝像頭與側向類似,雖然測距和測速不夠在準確,但是具有足夠大的感知范圍,完全可以應對開門預警這種功能。下圖為后向環視攝像頭的感知范圍。

開門預警系統需要多傳感器的配合,取長補短。魚眼攝像頭能夠識別障礙物的類型,但是對障礙物的位置和速度估計較差;而角雷達僅對距離、速度估計較為準確,在判斷類型上無能為力。因此要實現汽車后方0~40米范圍內的障礙物的穩定感知,對奧迪工程師的融合算法有較大挑戰。
夜視系統
前段時間的Uber無人車在夜間撞死流浪漢的事情鬧得沸沸揚揚。其實夜間行人、動物的檢測問題早就有紅外夜視相機解決。
紅外夜視相機的與視覺傳感器有所不同,它是通過檢測范圍內的溫度變化,獲取圖像信號的。
下圖為紅外夜視相機實際拍攝的夜間圖像。

由圖可以看出,溫度越高的地方(人臉)表現出來的圖像越亮,溫度越低的地方(地面)則圖像亮度越暗。這種輪廓清晰的圖像信息,對工程師設計障礙物檢測算法有著很大幫助。夜視相機的實際檢測效果如下。
紅外夜視相機穩定的感知范圍是15~90米,即系統能夠至少90米提前感知到前方的行人、動物等障礙物,并作出預警提示。如果當初Uber的車上裝有夜視相機作為司機的提醒備份,那么Uber就可以避免這場悲劇了。
結語
上面僅對我個人比較關注的主動安全技術做了技術解析。更多地諸如后方通行警示系統、左轉輔助系統等主動安全技術,基本上都是在上述傳感器的功能基礎上做了擴展,有興趣的小伙伴可以到他們的官網上去了解。
自動駕駛+自主泊車+主動安全如此多的黑科技集一身,無論是對汽車工程師、交互工程師還是軟件工程師都是一項很大的挑戰。相信接下來的兩年里會有越來越多的黑科技出現在其他量產車上,拭目以待。
來源:第一電動網
作者:自動駕駛_陳光
本文地址:http://m.155ck.com/kol/70399
本文由第一電動網大牛說作者撰寫,他們為本文的真實性和中立性負責,觀點僅代表個人,不代表第一電動網。本文版權歸原創作者和第一電動網(m.155ck.com)所有,如需轉載需得到雙方授權,同時務必注明來源和作者。
歡迎加入第一電動網大牛說作者,注冊會員登錄后即可在線投稿,請在會員資料留下QQ、手機、郵箱等聯系方式,便于我們在第一時間與您溝通稿件,如有問題請發送郵件至 content@d1ev.com。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!








 京公網安備
11010502033163號
京公網安備
11010502033163號