對于所有談及自動駕駛的人來說,自動駕駛等級幾乎是完全繞不開的詞。
從LL0到5的6個等級,就像是考試的分數一樣,代表著由低到高的自動駕駛水平,不管是從業者還是圈外人士,都在使用這項標準對復雜的自動駕駛系統進行理解和區分。
不過,這套發布了數年并至今已更新至第三版的自動化系統分類和定義的標準,囊括的內容遠不止只是簡單劃分的6個等級,它同樣也為同級別系統間的比較提供了參考的方法。
其中,比較重要的三個參數是設計行駛區域(ODD)、動態駕駛任務(DDT)和動態駕駛任務支援(DDT Fallback)。為什么同級別自動駕駛系統之間差異巨大?為什么不同級別系統之間的實際體驗與等級不完全相符?透過這三個要素的對比,很多都能一窺端倪。
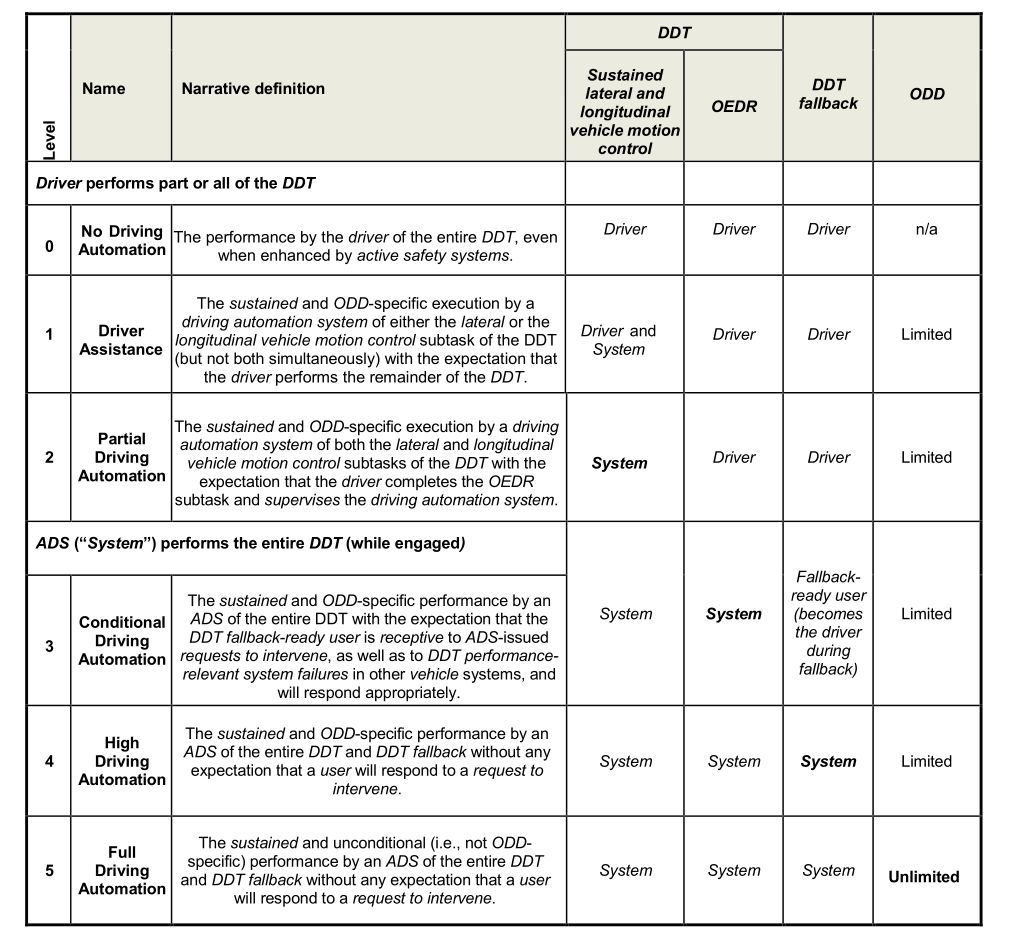 *截圖源自SAE J3016《道路機動車自動駕駛系統相關術語分類和定義》
*截圖源自SAE J3016《道路機動車自動駕駛系統相關術語分類和定義》
如果再對硬件和成本進行比較,那么一套自動駕駛系統到底“水平如何”,就能相對客觀地分辨出來。
值得一提的是,目前已經量產或短期內即將量產的自動駕駛功能,仍屬于限定條件或場景下的自動駕駛,歸屬于L2-L4級別,并非完全無限制的無人駕駛。而這些功能實際發揮出的效果,也與上文所提的三個要素緊密相關。
那么,到底怎樣的自動駕駛方案比較OK呢?不妨從這四個方面看看。
ODD全稱為Operational Design Domain,即設計行駛區域,指的是自動駕駛汽車安全工作的環境。它通常包括車輛自動駕駛時的速度、地形、路面情況、環境、交通狀況、時段等。
簡言之,ODD即是自動駕駛的適用范圍。因為高速還是低速,平原還是山地,直路還是彎路,天氣狀況如何,基礎設施怎樣,交通情況簡單還是復雜,處于白天還是晚上……這一系列的條件都會對自動駕駛的表現產生決定性的作用。

ODD是否全面細致,可以一定程度上反映出自動駕駛方案是否成熟;而ODD設定的條件寬松與否,也能一定程度上反映出同級別方案的水平高低。如果只能在嚴格限制的范圍內使用,那么車輛的“智能化”程度可能就相對較低,實際使用時的場景也相對較少、體驗稍差。
目前市場上的L2+及以上的自動駕駛方案中,對于車道線狀況、速度區間、駕駛員手扶方向盤等情況都有不同程度的限制,這些方面的體驗有待進一步的提升。比如,有的車輛只能在高速路段和限定的速度范圍內開啟功能,或者還要求路段覆蓋有高精地圖、駕駛員手扶方向盤,那么它的自動駕駛適用范圍也就相對較差。
而像Nullmax前裝方案中的高速代駕、擁堵跟車功能,因為不依賴高精地圖、允許駕駛員手離開方向盤、支持全速度段開啟等特點,所以具有較好的使用體驗和普適性。
DDT全稱Dynamic Driving Task,即動態駕駛任務,指的是在道路上駕駛車輛需要做的操作和決策,包括對車輛進行橫向運動和縱向運動方向的操作,對車輛周圍環境的監測和執行對應操作,等等。
簡單來說,DDT可以理解為自動駕駛方案實現的若干具體功能。在現今已量產的輔助駕駛、自動駕駛車型中,比較常見的跟車行駛、自適應巡航、緊急制動,以及極少數車型配備的撥桿換道、主動超車,便都是典型的動態駕駛任務。

不過即使是名字相同的功能,因為技術指標的不同,所能達到的性能也是不盡相同。以彎道車道保持為例,有的車輛只能應對一些不太急的彎道,比如遇到半徑小于250m的彎道,很可能就需要駕駛員操控。而在Nullmax的方案中,車輛可以支持曲率小得多的彎道,并且支持自動并線。
再比如撥桿換道,有的車型需要駕駛員確認路況,有的要求撥桿換道時達到一定速度以上。而不支持撥桿換道的車型,則需要駕駛員轉動方向盤執行換道。在Nullmax的方案中,車輛在駕駛員撥桿后可以自行判斷路況決定換道時機。
除了這些市面上可見的功能外,自動駕駛還能完成很多其他的DDT,比如橫向避讓。一般來說,汽車的車道保持通常設定為車道中心線行駛,不過考慮到鄰近車道可能存在不規范行駛的情況,所以讓車輛臨時在安全距離內偏離車道中心線,避讓旁側壓線車輛,能有效降低危險性、提高用戶體驗。這是Nullmax方案中的一項特色功能。
DDT Fallback全稱Dynamic Driving Task Fallback,意為動態駕駛任務支援,是指自動駕駛系統在設計的時候,要考慮系統性的失效或者出現系統運行設計范圍之外的情況,給出最小化風險的路徑。
在當前的量產方案中,分級預警是較為常見的DDT Fallback操作,雖然各家的最小風險狀態設計不盡相同,但減速停車是較為常見的設計。此外還有進入蠕行狀態、緊急呼叫等等其他的處理機制。

以Nullmax的方案為例,系統在檢測到需要駕駛員接管時,會分級發出接管提示。如果限定時間內駕駛員沒有響應一級提示,那么會發出二級提示,提示強度全面升級。在超出時間仍未接管的情況下,車輛將進入最小風險狀態,降低車速并停車。
此外,Nullmax的方案也可以配備運營中心,以支援駕駛中遇到的各種狀況,包括處理車輛發出的緊急求救。
受限于車規和成本問題,激光雷達目前只是在極少量產車型中有所應用,而主流的自動駕駛量產方案,更多地還是使用攝像頭、毫米波雷達、超聲波雷達這些成熟的硬件。計算平臺的選擇同樣如此,除了性能之外,也需要符合車規級標準和控制成本。
目前常見的自動駕駛產品,因為實現的功能和側重點各有不同,所以有的車型的配置會比較穩健保守,有的則會相對激進一些。整體來說,功能越豐富、越智能,硬件配置則會要求越高,成本也就會相應上升。
正是考慮到這些因素,所以Nullmax的前裝方案可根據需求提供不同的硬件配置。車輛既可以選擇高端配置實現全部的功能,將硬件成本控制在萬元以內;也可以選擇基于低成本芯片的經濟配置,實現按需的自定義功能,將硬件成本再大幅降低。
此外,在充分挖掘軟硬件潛力的情況下,車輛也可以做到以更優的成本實現同等的體驗。比如在Nullmax的一些定制化方案中,就可以不使用環視攝像頭的情況下,通過角雷達和傳感器融合來實現側后方和側前方的障礙物感知。
目前,市場上各類的L2+及以上的自動駕駛套裝,價格大都處于數萬元的區間范圍,實際體驗上各有不同,雖然相似之處頗多,但相去甚遠之處也有。
自動駕駛汽車非常復雜,如果僅僅只是使用L0-L5的等級來進行區分和評判,這還不夠全面。
如果再結合產品的適用范圍、核心功能、動態駕駛任務支援、硬件配置和成本等等情況,那么就可以相對客觀地判斷一套方案“是好是壞”。
來源:紐勱科技
本文地址:http://m.155ck.com/news/jishu/105381
以上內容轉載自紐勱科技,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號