蓋世汽車訊 人類可能是全自動駕駛汽車進入城市街道的最大障礙之一。機器人必須能夠預測附近駕駛員、騎自行車的人和行人的行為,才能在波士頓市中心安全地駕駛車輛。然而行為預測問題很難解決,當前的人工智能解決方案要么過于簡單(可能假設行人總是走直線),要么過于保守(為了避開行人,機器人只是把車停在公園里),或者只能預測一個代理的下一步動作(道路通常同時承載許多用戶。)
據外媒報道,麻省理工學院(MIT)的研究人員設計出一種看似簡單的解決方案,通過將多智能體行為預測問題分解成更小的部分并單獨處理每個部分,使得計算機可以實時解決這一復雜任務。
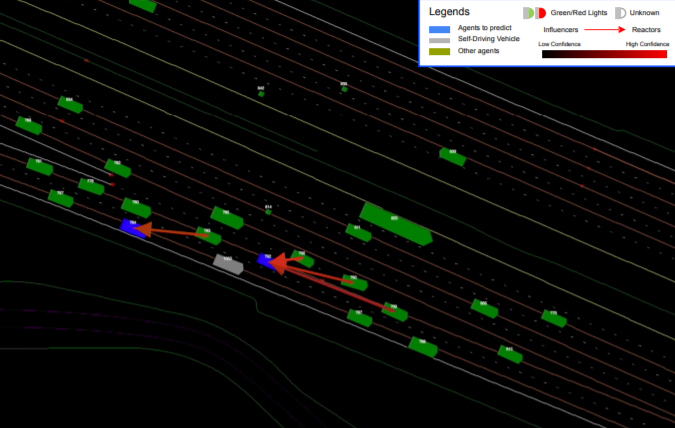
圖片來源:arxiv
研究人員的行為預測框架首先會猜測兩個道路使用者之間的關系,哪輛車、騎自行車的人或行人擁有通行權,以及哪個代理會讓路,并使用這些關系來預測多個代理的未來軌跡。
研究的共同主要作者Xin "Cyrus" Huang表示:“將我們的模型與該領域的其他最先進模型比較,如Waymo的模型,我們的模型在這個具有挑戰性的基準測試中取得了最佳性能。”
多個小模型
研究人員將該機器學習方法稱為M2I,需要兩個輸入:汽車、騎自行車的人和行人在交通環境(例如十字路口)中交互的過去軌跡,以及帶有街道位置、車道配置等的地圖。
使用此信息,關系預測器可推斷出兩個代理中哪一個首先擁有通行權,并將一個分類為通過者,一個分類為讓行者。然后一個預測模型(邊際預測器)猜測通過代理(獨立運行)的軌跡。
第二個預測模型,稱為條件預測器,會根據通過代理的動作猜測讓行代理的動作。該系統為讓行者和通過者預測許多不同的軌跡,分別計算每個軌跡的概率,然后選擇發生可能性最高的六個聯合結果。
M2I輸出預測這些代理將如何在接下來的8秒內通過路口。在一個示例中,研究方法使車輛減速,以便行人可以過馬路,然后在行人通過交叉路口時再加速。在另一個示例中,車輛等到幾輛汽車通過后才從一條小街轉向繁忙的主干道。
雖然這項初步研究側重于兩個代理之間的交互,但M2I可以推斷許多代理之間的關系,然后通過連接多個邊際和條件預測變量來猜測它們的軌跡。
真實世界的駕駛測試
研究人員使用Waymo Open Motion數據集訓練模型,該數據集包含由安裝在公司自動駕駛汽車上的激光雷達(光檢測和測距)傳感器和攝像頭記錄的數百萬個涉及車輛、行人和騎自行車者的真實交通場景。研究人員特別關注具有多個代理的案例。
為了確定準確性,研究人員將每種方法的六個預測樣本(按置信度加權)與場景中汽車、騎自行車者和行人所遵循的實際軌跡進行了比較。結果顯示,他們的方法是最準確的。該方法還在被稱為重疊率的指標上優于基線模型;如果兩條軌跡重疊,則表明發生了碰撞。M2I的重疊率最低。
M2I的另一個優點是,因為它將問題分解成更小的部分,因此用戶更容易理解模型的決策。研究人員表示,從長遠來看,這可以幫助用戶更加信任自動駕駛汽車。
但是該框架無法解釋兩個代理相互影響的情況,例如兩輛車在四向停車時各自向前輕推,因為駕駛員不確定誰應該讓步。
未來,研究人員計劃解決該問題。此外,他們還希望使用該方法來模擬道路使用者之間的真實交互,從而可用于驗證自動駕駛汽車的規劃算法或創建大量合成駕駛數據,進而提高模型性能。

來源:蓋世汽車
作者:劉麗婷
本文地址:http://m.155ck.com/news/jishu/173299
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號