蓋世汽車訊 據外媒報道,德國烏爾姆大學(Ulm University)的研究人員近日開發出一個新框架,旨在實時識別車輛周圍的潛在威脅,從而提高自動駕駛汽車在城市和高度動態的環境中的安全性。
圖片來源:Henning
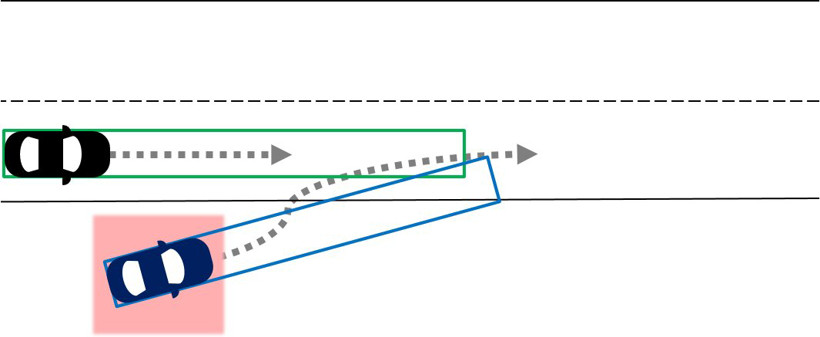
研究人員之一Matti Henning表示:“我們研究的核心理念是將感知資源僅分配給與當前情況相關的自動駕駛汽車周圍的區域,而不是簡單的360°感知領域。這種方式可以節省計算資源,從而提高自動駕駛汽車的效率。”
當自動駕駛汽車的感知范圍有限時,其安全性可能會大幅下降。例如,如果一輛車只認為其周圍的特定區域是“相關的”,它可能無法檢測到其他區域的潛在威脅物體。如果支持車輛功能的算法被編程為僅考慮和處理道路的特定區域,則可能會發生這種情況。
來源:蓋世汽車
作者:劉麗婷
本文地址:http://m.155ck.com/news/jishu/180989
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號