本月中旬,小鵬汽車搶先宣布城市NGP功能在北京開放,這是業(yè)內首次。
北京因為特殊的政治地位,此前從未給車企開放過高階輔助駕駛,甚至當特斯拉被曝有視頻采集數(shù)據(jù)方面的安全隱患之后,各大機要單位一度禁止特斯拉入內,一時激起千層浪。
小鵬搶先起跑,而理想悄然出現(xiàn)在他身后。
本周,理想汽車開啟城市NOA的媒體試駕,理想城市NOA對于媒體來說并不陌生,但不同之處在于地點——北京順義理想研發(fā)總部到望京。這意味著,理想汽車即將開放北京高階輔助駕駛。這一消息也得到了理想方面證實,即將在本月末開啟北京和上海的城市NOA內測,早鳥用戶可以率先使用城市NOA功能,下半年將開放通勤NOA功能,并開放更多的城市NOA區(qū)域。
理想春風得意 卻被小鵬搶了先機?
曾經(jīng)被譽為新勢力三杰的蔚小理,不知不覺間拉開了差距,理想汽車銷量數(shù)據(jù)節(jié)節(jié)攀升,6月份穩(wěn)妥的超過3萬輛,而另外兩家還在萬輛生死線上掙扎。如果考慮到車型均價,那么37萬元的理想把他們甩的更遠了。
就在理想春風得意的宣布第40萬輛車下線、講述基于大模型時代AD MAX 3.0高速成長的前夕,小鵬突然宣布在北京開放城市NGP也就是高階輔助駕駛,在智駕方面成為了吃螃蟹的人。
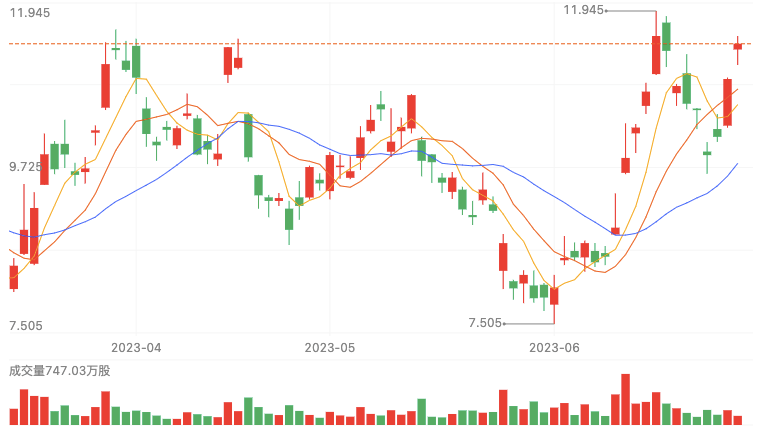
也正因如此,小鵬股價躍然而起,單日漲幅一度超過10.6%。說明這件事的積極意義得到業(yè)內和投資者的認可。
登場有先后,但在擂臺上,站到最后的才是強者。理想NOA和小鵬NGP都在搶占北京這座極富代表性的一線城市,他們誰更有希望成為最后的贏家?
要解決這個問題首先要看看他們有何不同。
理想NOA和小鵬NGP有何不同?
有幸的是,這兩款產(chǎn)品我們都體驗過了。首先從底層實現(xiàn)邏輯上,兩者有著明顯的區(qū)別,具體可以看下面的圖表。
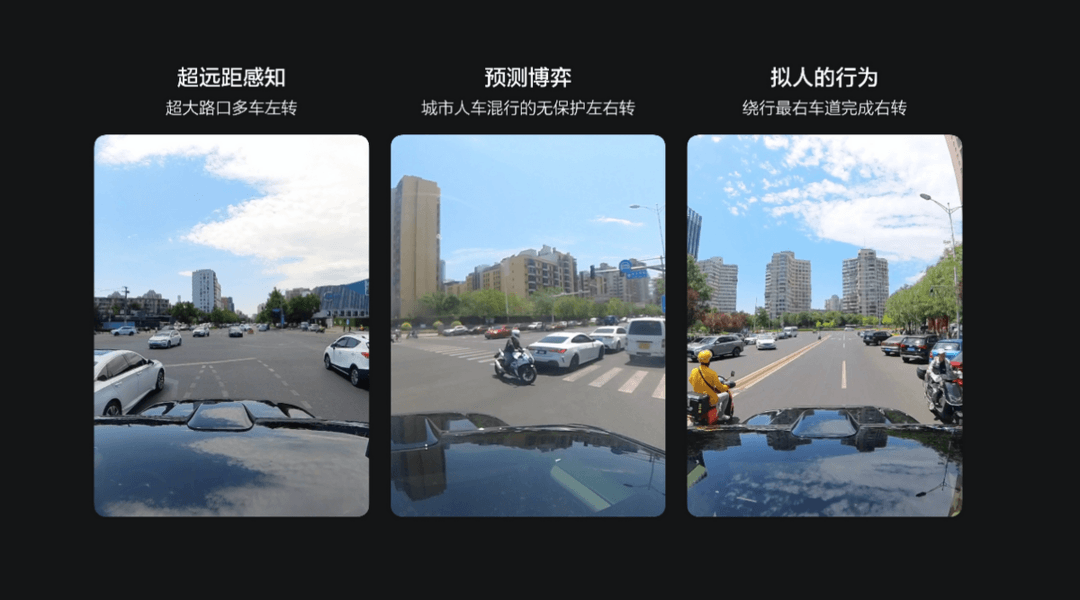
理想NOA:理想城市NOA技術架構有三個特點是:第一,使用NPN(神經(jīng)先驗網(wǎng)絡)特征和TIN(端到端的交通信息)網(wǎng)絡增強BEV大模型,聽起來很復雜,從結果上看就是開了俯視圖,做到不依賴高精地圖,;第二,使用模仿學習讓規(guī)控算法做出更加擬人的決策;第三,全自動、全閉環(huán)的訓練平臺支撐大模型持續(xù)進化。
從實際體驗的角度來說,從理想北京研發(fā)總部(順義)到望京的幾十公里復雜路況當中,需要經(jīng)過58個路口,多次轉彎,甚至還要穿過鄉(xiāng)村道路以及環(huán)島,還有大量施工路段。整個過程中,只有一次因為違章闖紅燈突然鉆出的騎行者,導致下意識的剎車接管(并非車輛自己取消),基本上全程車輛自己就可以完成通行。當然偶爾還是出現(xiàn)了兩次因為謹慎對待對向不明意圖車輛而導致的突然剎停,有點莫名其妙,但整體感覺超出預期了,尤其是在面對異形車輛和呼嘯而過的加塞車輛的時候,表現(xiàn)非常穩(wěn)健。
小鵬NGP:小鵬城市NGP(Navigation Guided Pilot),可以理解為將高速領航輔助系統(tǒng)搬入復雜的城市,在城市里也可以做到點到點無接管的程度,車輛可以實現(xiàn)自動識別紅綠燈通過路況、自動超車、自動限速調節(jié)、最優(yōu)車道選擇、自動切換高速公路、自動上下匝道、變道自動緊急避讓等功能,甚至還包括大車規(guī)避、夜間超車提醒、故障車輛避讓、擁堵道路超級跟車等。原本城市NGP是依賴于高精地圖的,但因為北京的特殊性,無法實現(xiàn)高精地圖覆蓋,所以城市NGP則無法使用高精地圖,只能依賴于普通地圖和視覺感知獲取道路信息。
由于只開通了環(huán)路和部分高速,所以在場景方面,小鵬城市NOA在北京的體驗場景不夠復雜,遇到的異常狀況也不多。同事對這套系統(tǒng)高度評價:這套系統(tǒng)是目前試過的邏輯和操作都屬于一流水平,跟車邏輯、變道相應以及彎道速度把控都是頂尖水平。除了側向監(jiān)測水平稍有不足,其他表現(xiàn)都很好。
雖然一個叫城市NOA一個叫城市NGP,理論上都是針對城市道路的高階輔助駕駛,看上去應該是同級競技,然而在了解了兩者實現(xiàn)邏輯和功能取向后,會發(fā)現(xiàn)他們并不對稱。理想這套基于視覺方案的NOA真正對應的是小鵬XNGP。
小鵬的確搶占先機,利用城市NGP率先撬開北京的大門。然而它的終極形態(tài)XNGP卻遲遲沒有動作,而XNGP真正的對手,理想城市NOA已經(jīng)開始試水了,頗有點后發(fā)先至的味道。雖然起跑晚了半個身位,腳步卻落在前面。
現(xiàn)在是跟時間賽跑的時候了
小鵬搶占先機,但是討了個巧,首先開放的是城市NGP,主要覆蓋范圍是環(huán)路,凡是生活在北京的參與路上交通的人,大多數(shù)會對環(huán)路有感知,而且他們已經(jīng)開始逐漸推送給用戶,毫無疑問的是小鵬會被更多車主感知到、體驗到。
然而,他們面臨最大的問題是如何從環(huán)路走下去?真正覆蓋城市大多數(shù)區(qū)域,只能等待XNGP有進展了。
根據(jù)小鵬此前的說法,XNGP會在2024-2025年的某個時間段登陸,還需要將近兩年的等待。
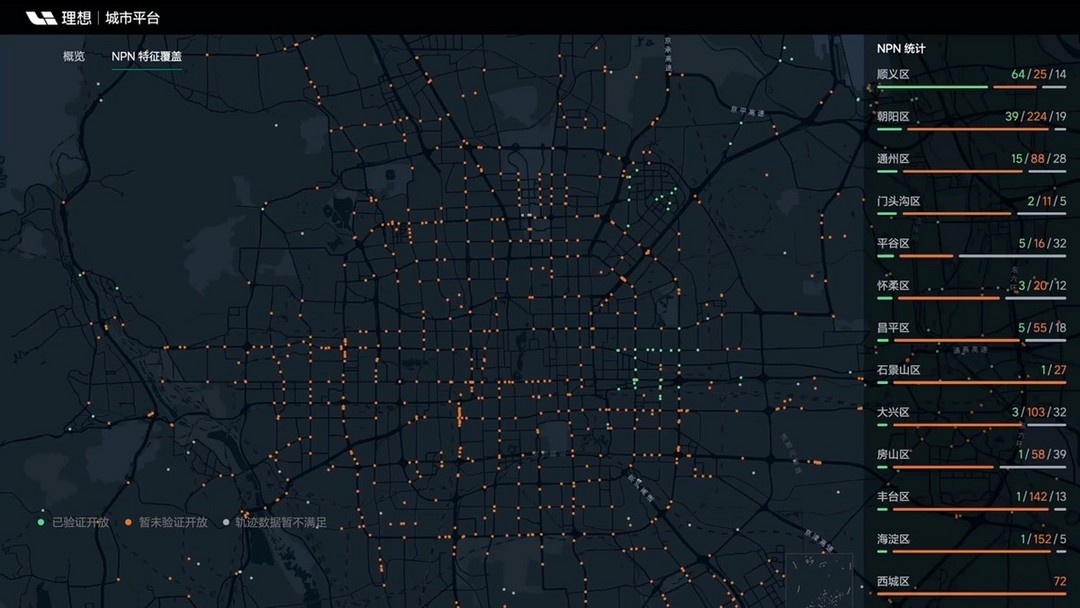
理想表示:今年3月開始,已經(jīng)在城市NOA的“早早鳥”和測試車輛上,開始運行NPN網(wǎng)絡,提取和存儲NPN特征。通過城市NPN覆蓋的研發(fā)平臺,可以查看現(xiàn)在的覆蓋情況。綠色代表已經(jīng)通過測試驗證,是可用狀態(tài);紅色代表有NPN特征但有待驗證;灰色代表沒有NPN特征。
現(xiàn)在內側推送給“早鳥”用戶,并發(fā)放任務,目的就是進一步推進城市NOA的不斷進化與學習,但最終什么時候可以呈現(xiàn)給普通用戶,還不得而知。
對于小鵬和理想,到了與時間賽跑的時候了。畢竟,競爭者可不止他們兩家。
理想留了一手——通勤NOA
就好像小鵬用城市NGP搶跑一樣,理想也留了一手,就是通勤NOA功能。
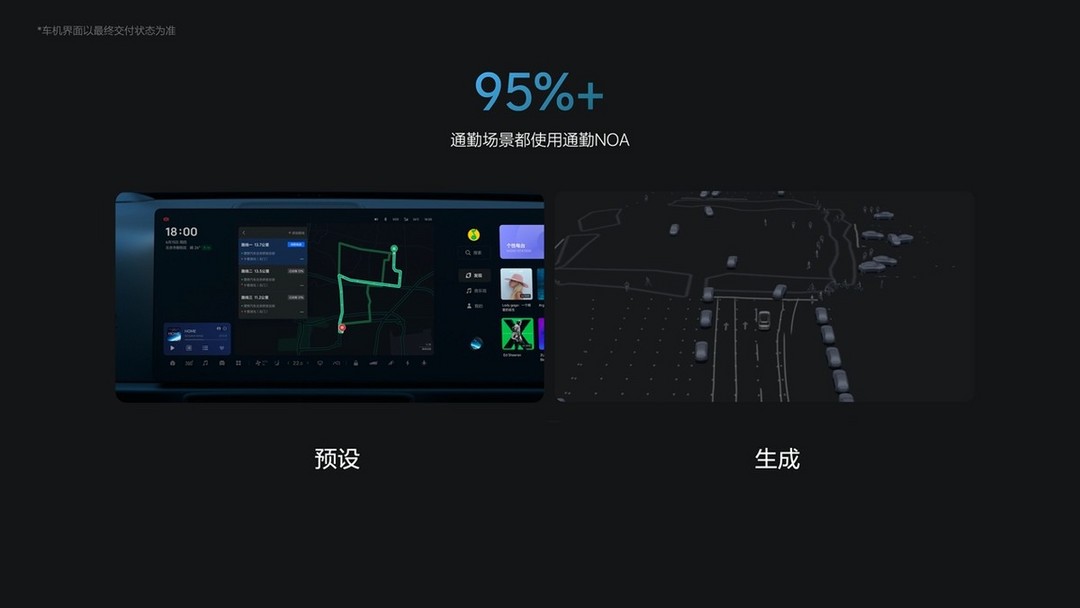
所謂的通勤NOA,就是用戶可以自己設定路線,比如從家到工作單位,開啟這個功能之后,通過每天上下班,自車學習NPN特征,開啟功能后會有進度條顯示,進度完成意味著車輛學成,之后就可以在上下班路線上使用NOA功能了。
城市NOA要等城市NPN特征訓練好才能開通,而有了通勤NOA,就不用等城市NOA。設定好自己的通勤路線后,相對簡單的路線,基本1周以內就可以完成激活,較為復雜的路線,預計2-3周也足以完成訓練。而且通勤道路距離目前還沒有限制。在通勤NOA使用過程中,各個模型仍會不斷地迭代訓練,越開越好用。
根據(jù)理想官方預估,通勤NOA功能可以覆蓋理想車主95%以上的通勤場景。雖然現(xiàn)階段還不能徹底解放雙手雙腳,也沒達到“配司機”的能力,但一定程度上可以緩解疲勞,增加智駕體驗。
小鵬XNGP、理想NOA或者別的什么智駕方案是最優(yōu)選擇?現(xiàn)在這個階段誰也無法得出結論。雖然他們都在努力,但在可以預見的未來,短時間內L3還是不能跨越到L4。
路況無邏輯,即便是走在最前面的企業(yè),也不能真正意義上解放車主的雙手雙腳,然而路況正在變得可以預測,所以智能駕駛才得以四處開花。
發(fā)令槍才剛響起,未來鹿死誰手,我們拭目以待。
來源:第一電動網(wǎng)
作者:卡卡落
本文地址:http://m.155ck.com/news/jishu/205559
本文版權為第一電動網(wǎng)(m.155ck.com)所有,未經(jīng)書面授權,任何媒體、網(wǎng)站以及微信公眾平臺不得引用、復制、轉載、摘編、以其他任何方式使用上述內容或建立鏡像。違反者將被依法追究法律責任。
版權合作及網(wǎng)站合作電話:17001180190
文中圖片源自互聯(lián)網(wǎng),如有侵權請聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經(jīng)成功提交我們稍后會聯(lián)系您進行報價!




 京公網(wǎng)安備
11010502033163號
京公網(wǎng)安備
11010502033163號