蓋世汽車訊 脈沖激光掃描是自動駕駛和機器人移動出行的核心技術,此種技術的原理即定向光脈沖被反射物體向后散射,并利用脈沖發射和探測到脈沖之間間隔的時間來計算深度。此類返回激光脈沖的直接飛行時間(d-ToF)測量結果使得復雜場景的三維成像成為可能。
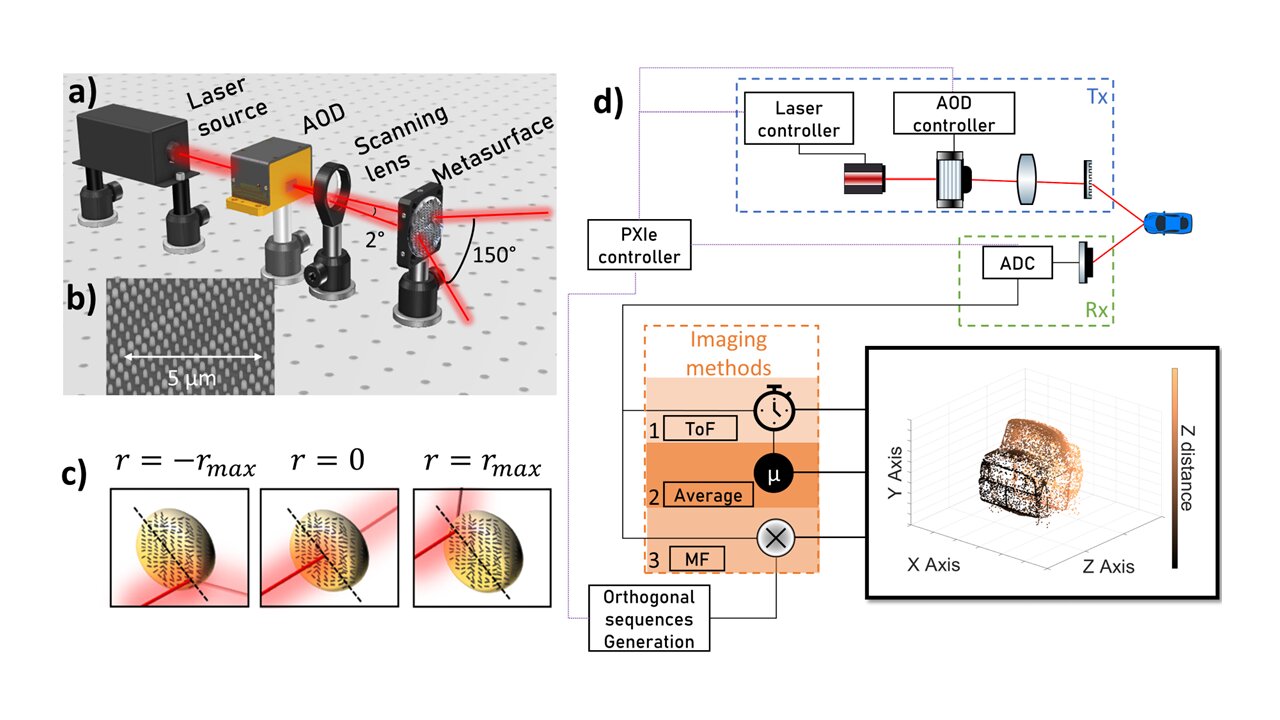
超快高視場超表面激光雷達的架構(圖片來源:蔚藍海岸大學)
目前,激光雷達技術還需要得到大量的發展,包括提升高角度分辨率的觀測視場(FoV),改進成像幀率,通過降低信噪比(SNR)擴大模糊范圍,降低制造成本和組件尺寸,從而讓其在全球市場上實現大規模工業化應用。
法國蔚藍海岸大學(Université C?te d'Azur)Patrice Genevet研究小組提出了一個創新解決方案,以解決激光雷達技術的一些限制,并滿足汽車激光雷達的苛刻要求。
來源:蓋世汽車
作者:Fairy
本文地址:http://m.155ck.com/news/jishu/206963
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號