據外媒報道,英國拉夫堡大學(Loughborough University)與捷豹路虎提出了ADAS系統的協作式動作管理控制架構(coordinated control architecture for motion management)理念,旨在提升所有車輛的安全性及舒適性,適用于所有ADAS規格。
如今,在應用的ADAS系統種類繁多,該類系統通常都能為用戶提供特色功能,可借助車載系統的新增控制件來實現,例如:制動或轉向系統。ADAS系統通常被用作駕駛員的輔助工具,但不得被用于代替駕駛員完成車輛的駕駛操控。
ADAS系統的物理建模與控制架構是利用MATLAB/Simulink來執行的,該類開放性平臺可供各方開展進一步的研發工作。有一支團隊預計到,在動態模式下,該架構不易受細節變化的影響。
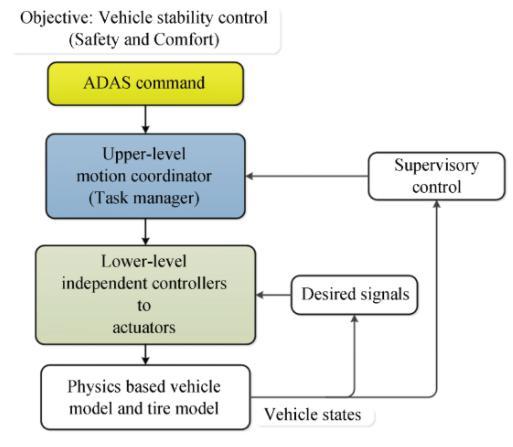
該款協作式動作管理控制架構分為四個層級:最頂端為ADAS級,負責生成作為指令的理想行駛軌跡(ideal trajectory)。第二層級為高級別(任務管理器,task manager)的動作協調器;第三層為低級別的協作式動態控制器;最后一層為底層的車輛動力學模型(vehicle dynamics model)。
研究團隊在模擬器上運行各類綜合性信息,旨在分析在車輛變道時,各獨立系統是如何影響車輛行駛軌跡(vehicle trajectory)的。
他(她)們發現,轉向系統將導致模擬車輛脫離目標,而制動系統的制度幅度過大(overshot)。
研究人員將繼續致力于拓展系統控制架構體系,從而更好地研發ADAS協作式控制。他們將會檢驗新系統是如何與當前系統進行干涉,以便全面了解該系統的控制性能及穩定性。
該研究獲得了拉夫堡大學模擬創新項目的支持。
來源:蓋世汽車
本文地址:http://m.155ck.com/news/jishu/67109
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號