近年來,隨著汽車電子設備的不斷向前發展,以智能化、網聯化為重要特征的汽車科技創新為汽車產業帶來重大變革。人們對智能汽車提出不同的功能需求,如:ADAS輔助駕駛、自動駕駛、車載娛樂、車身監控,促使汽車制造商需要在車內部署眾多數量的ECU實現復雜的功能以滿足用戶需求,而大量ECU的使用需要高速、高帶寬、低延遲的車載網絡通信,但傳統CAN總線難以滿足高速、高帶寬以及低延遲的需求。因此,為了滿足智能化、網聯化的發展,在傳統以太網的基礎上,IEEE提出具有高速、高帶寬、低延時的傳輸特性的車載以太網,促使未來汽車網絡從現有CAN為通信基礎的網絡逐步過渡到以車載以太網為骨干網絡的通信網絡。因此,國內外大量優秀的企業在從事車載以太網技術的研發,如在國內,以赫千科技為代表企業正在聚焦車載以太網技術研發工作,加速以車載以太網總線為通信基礎的產品的量產進程。
CAN總線會被車載以太網總線完全取代嗎?
CAN是ISO國際標準化的串行通信協議,它是一種有效支持分布式控制或實時控制的串行通信網絡。相比于其它通信總線,CAN的技術特性使其在車載環境中特別有效,參見表1,例如:首先是其對噪聲的高容忍度,并得到 CAN 的物理層和協議的支持,CAN 支持原生多播和廣播,提供內置幀優先級, 100% 分布式運行,輕松支持數十英尺的長單總線等優點。
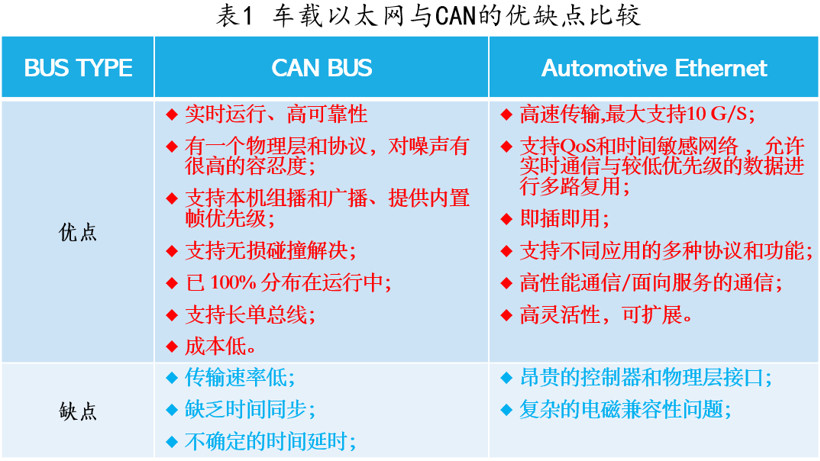
相比于CAN,車載以太網具備高速傳輸,通過光纖傳輸可支持10 G/s的傳輸速率,支持QoS和TSN,允許實時確定性的通信,支持多種不同的協議,支持面向服務SOA的通信并且可擴展。顯然,車載以太網與CAN在不同的應用場景有著不同的優勢。在目前階段,為了適配汽車智能化、網聯化的功能需求,汽車的E/E架構從傳統的分布式過渡為以區域為導向的E /E 架構,如區域包括:智能駕駛域、座艙域、車身域等。基于區域的E/E架構,在骨干網絡,采用高帶寬的車載以太網進行通信連接相應域控制器或區域網關,在區域網關或域控制器下,可通過多種不同總線CAN、LIN、分支車載以太網連接相應的傳感器和執行器。因此,E/E架構的實現需要將 CAN 和車載以太網結合起來一起使用,此外,對于許多傳統的汽車網絡用例,CAN 仍然更具成本效益。綜上所述,未來較長一段時間內,車載以太網與CAN并非是取代關系,而是相互共存。 CAN與車載以太網共存的車載網絡中,必然存在CAN ECU與車載以太網ECU的相互通信的需求,但是目前標準中尚未有CAN ECU與車載以太網ECU的數據包進行相互轉化的方案。
如何實現車載以太網的SOME/IP數據與CAN協議的數據相互轉化?
由于CAN總線與車載以太網總線在較長一段時間內將共存于車載網絡,因此需要構建CAN ECU與車載以太網ECU的通信橋梁,確保車載網絡的正常通信。為了尋求解決方案,我們通過在權威的專利數據庫進行查詢,發現上海赫千電子科技有限公司(HingeTech)較早提出一種CAN數據包與車載以太網的數據包的轉化方案(授權公告號為:CN111130676 B),其轉化方法如下:
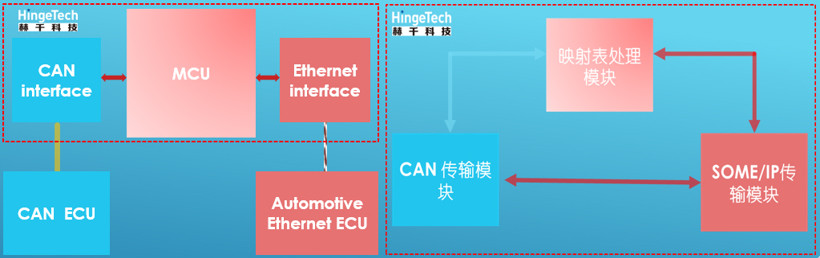
圖1 CAN數據與車載以太網的SOME/IP數據轉換示意
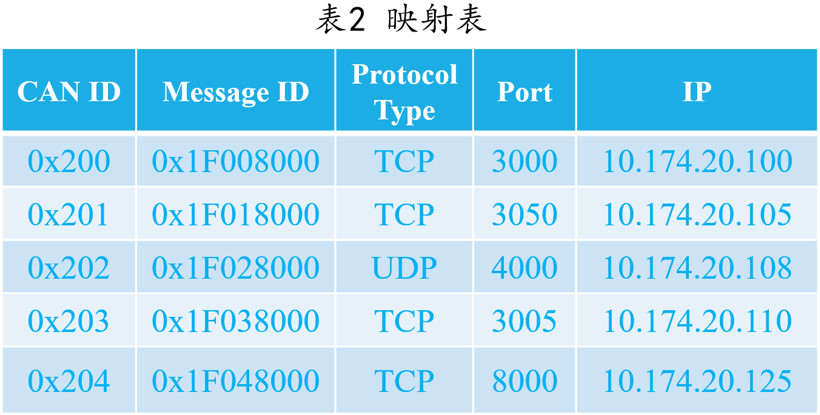
參見圖1以及表2,通過設置微處理控制器(MCU),在微處理控制器的兩端設置CAN接口和車載以太網接口,微處理控制器負責對CAN數據包、車載以太網數據包的解析,并根據需求封裝成對應CAN數據包或車載以太網數據包;微處理控制器包括SOME/IP傳輸模塊、CAN傳輸模塊、映射表處理模塊,映射表處理模塊連接SOME/IP傳輸模塊和CAN傳輸模塊,用于對SOME/IP協議的信號與CAN協議的信號之間的相互轉化進行解碼;映射表處理模塊包括CAN地址識別碼(CAN ID)與SOME/IP的Message地址識別碼(Message ID)對應映射表;映射表還包括SOME/IP的信息地址識別碼與傳輸終端的地址、服務端口號等信息。
車載以太網的SOME/IP數據包轉化CAN數據包的核心方法包括:SOME/IP傳輸模塊按照SOME/IP協議進行解包,解包過程包括對接收到的SOME/IP協議的信號進行解析并分離出信息地址識別碼(Message ID)和載荷信號;然后調用映射表處理模塊,解析出與Message ID對應的CAN ID;CAN傳輸模塊將CAN ID和載荷信號按照CAN標準協議進行封裝后通過CAN接口傳輸至CAN總線上。
CAN格式的數據包轉化車載以太網的SOME/IP數據包的核心步驟包括:CAN傳輸模塊按照CAN協議進行解包,解包過程包括對接收到的按照CAN協議進行傳輸的信號進行解析并分離出CAN地址識別碼(CAN ID)和載荷信號,然后調用映射表處理模塊,解析出與CAN ID對用的Message ID,通過Message ID,SOME/IP傳輸模塊捕獲Message ID以及對應的協議類型、端口和IP地址和載荷信號,按照SOME/IP協議的格式進行封裝后通過車載以太網接口發送至車載以太網總線上。通過內置的查找映射表,來實現載荷信號的轉發,從而連接了車載以太網網絡和CAN網絡,同時將車載以太網網絡節點和CAN網絡節點通過該裝置互聯。
由此可見,赫千科技通過提供車載以太網數據與CAN數據進行相互轉化的技術,使得以區域為導向的E /E 架構中CAN ECU與車載以太網ECU能夠正常通信。另外,車載以太網的SOME/IP的通信與CAN通信最大的區別在于SOME/IP通信時面向服務,CAN的通信是面向信號的。面向服務的通信能夠大大減少網絡負載,提高通信效率,因此汽車的Adaptive AUTOSAR采用SOME/IP作為通信中間件的SOA的軟件架構。赫千科技在車載以太網研究工作中,針對域控制器、智能座艙、儀表、ADAS輔助駕駛、自動駕駛等應用的SOME/IP通信成功量產了SOME/IP協議棧和自動化的Hinge-Matrix SOA Tool。如圖2所示。赫千科技提供的SOME/IP協議棧具備多種功能的支持,例如:支持SOME/IP-SD,SOME/IP,序列化與反序列化,Event, Field;具備高性能:CPU載荷<2%,請求&響應小于1ms;具備高穩定性。
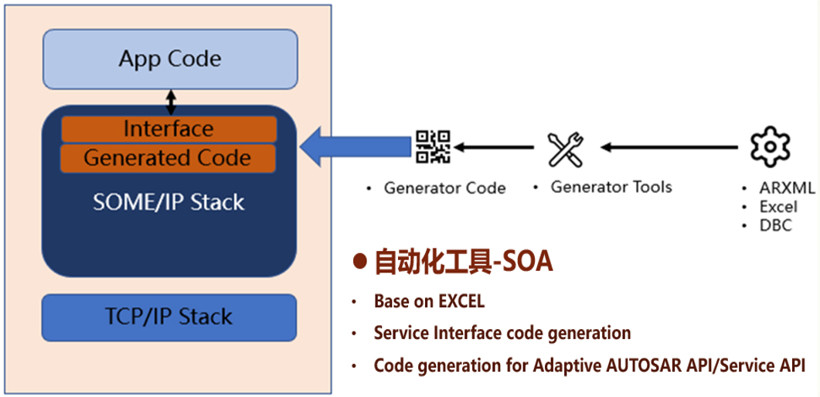
圖2 赫千科技SOME/IP協議棧和自動化SOA工具
鑒于當前面向SOA的服務API開發較為繁瑣,赫千科技提出Hinge-Matrix SOA Tool,可根據場景快速的定制化生成基于服務API。 Hinge-Matrix SOA Tool,基于多種不同格式的配置文件,如Excel格式文件,通過將Excel格式的配置文件導入Hinge-Matrix SOA Tool,自動產生服務代碼,將產生的服務代碼導入SOME/IP協議棧,快速完成Autosar API/Service API的開發,大大的縮短軟件的開發周期。
綜上所述,未來較長一段時間內,車載以太網與CAN網絡因各具不同優勢,將共存于車載網絡中,赫千科技提供的車載以太網的SOME/IP數據與CAN數據的相互轉化方法解決了車載網絡中車載以太網接口的ECU與CAN接口的ECU的相互通信,為區域為導向的E /E 架構運用奠定堅實的基礎,同時也提供相應的SOME/IP協議棧以及SOA快速代碼生成工具,從多個方面加快汽車的智能化、網聯化的發展進程。
來源:蓋世汽車
作者:赫千科技
本文地址:http://m.155ck.com/news/qiye/188138
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號