Apollo開放平臺正在全球范圍內掀起一場自動駕駛界的行業協同浪潮。美國時間3月8日,百度Apollo自動駕駛開放平臺正式加入加州大學伯克利DeepDrive深度學習自動駕駛產業聯盟(Berkeley DeepDrive),并發布了Apollo數據及前沿技術品牌Apollo Scape,正式開放Apollo Scape大規模自動駕駛數據集。

自動駕駛的飛速發展將學術界和企業前所未有地緊密聯系在一起。加州大學伯克利DeepDrive深度學習自動駕駛產業聯盟是由加州大學伯克利分校領導的研究應用于汽車領域的計算機視覺和機器學習前沿技術的產業聯盟。包括了英偉達、高通、通用、福特等20家全球自動駕駛領域最為頂尖的企業,研究項目覆蓋感知、規劃決策、深度學習等自動駕駛關鍵領域。Apollo開放平臺加入DeepDrive聯盟,將與全球自動駕駛領先企業以及頂級學術研究機構攜手,通過共享研究成果、交流經驗,進一步壯大自動駕駛研發力量。百度副總裁,AI技術平臺體系(AIG)總負責人、百度研究院院長王海峰表示:“百度和伯克利的合作,將依托Apollo開放平臺的產業化資源和伯克利頂尖的學術團隊,加快自動駕駛的技術創新、理論創新、以及落地應用的進程。”
發布會上,百度ApolloScape重磅發布了自動駕駛開放數據集。自動駕駛開發測試中,海量、高質的真實數據是必不可缺的“原料”。但是,少有團隊有能力開發并維持一個適用的自動駕駛平臺,定期校準并收集新數據。Apollo開放平臺此次發布的ApolloScape不僅開放了比Cityscapes等同類數據集大10倍以上的數據量,包括感知、仿真場景、路網數據等數十萬幀逐像素語義分割標注的高分辨率圖像數據,進一步涵蓋更復雜的環境、天氣和交通狀況等。
從數據難度上來看,ApolloScape數據集涵蓋了更復雜的道路狀況(例如,單張圖像中多達162輛交通工具或80名行人),同時開放數據集采用了逐像素語義分割標注的方式,是目前環境最復雜、標注最精準、數據量最大的自動駕駛數據集。
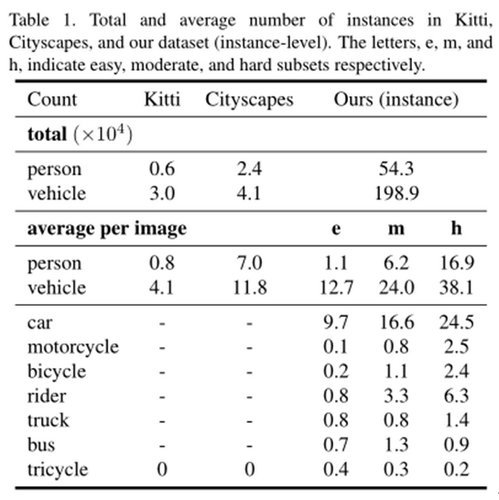
Kitti,CityScapes和ApolloScape關于數據實例的對比
ApolloScape發布的整個數據集包含數十萬幀逐像素語義分割標注的高分辨率圖像數據,為便于研究人員更好的利用數據集的價值,我們在數據集中定義了共26個不同語義項的數據實例(例如汽車、自行車、行人、建筑、路燈等),并將進一步涵蓋更復雜的環境、天氣和交通狀況等。
此外,ApolloScape還將進行更多關于仿真的前沿技術研究,目標是打造真實世界還原度最高、場景最豐富的仿真平臺;現階段,基于Apollo仿真平臺,ApolloScape計劃同時將數十輛自動駕駛車輛投入到同一個路網中行駛,可以模擬真實的復雜駕駛場景和多車博弈過程,是目前最先進的智能駕駛仿真技術之一可以幫助研發人員有效檢驗并優化預測、決策和路徑規劃等算法,顯著提升自動駕駛的測試多樣性。
創新沒有國界,科技亦沒有國界。從巨頭企業到頂級學府,從中國到全球,百度Apollo開放平臺積聚了全行業的頂尖力量,掀起了世界范圍內的合作協同。據悉,Apollo開放平臺還將與加州大學伯克利分校在CVPR(IEEE國際計算機視覺與模式識別會議)期間聯合舉辦自動駕駛研討會(Workshop on Autonomous Driving),并將基于ApolloScape的大規模數據集定義了多項任務挑戰,為全球自動駕駛開發者和研究人員提供共同探索前沿領域技術突破及應用創新的平臺。
來源:蓋世汽車
本文地址:http://m.155ck.com/news/qiye/64267
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號