近日,百度發布了國內首個L4級自動駕駛純視覺城市道路閉環解決方案——百度Apollo Lite。
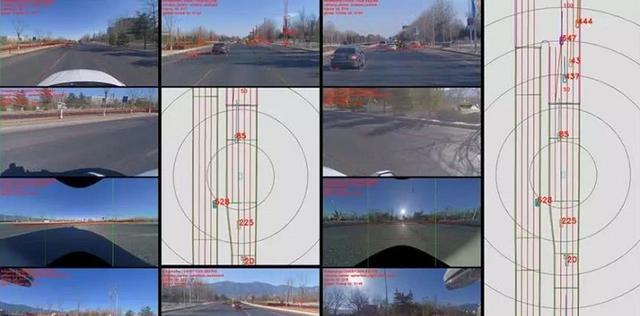
據百度方面介紹,Apollo Lite經過前期研發和今年上半年的路測迭代,已經可以做到10路攝像頭、200幀/秒數據量的并行處理,單視覺鏈路最高丟幀率低于5%,360°實時環境感知,以及前向障礙物的穩定檢測視距達240米。簡單來說,基于Apollo Lite的10路攝像頭感知系統,百度無人車已經可以在不依賴高線數旋轉式激光雷達的情況下,實現端到端閉環自動駕駛。
而且相較于旋轉式激光雷達感知方案,因攝像頭是相對成熟的從傳感器,且價格低、符合車規,所以視覺感知方案的成本更低。與此同時,攝像頭獲取的圖像與人眼感知的圖像最為接近,較三維點云數據更為直觀,對算法、數據積累量、研發投入等的要求也比較低。
除此之外,百度Apollo技術委員會主席王亮還表示,“百度一直堅持走多傳感器融合的技術路線,因為在L4級自動駕駛傳感器選型上,激光雷達和攝像頭是同等重要且不可替代的,而不是排它或者從屬關系。因此,研發Apollo Lite并不代表百度會放棄現有的激光雷達技術方案。”
而實際路測結果顯示,Apollo Lite的性能足以與全球最大的ADAS供應商Mobileye的純視覺解決方案媲美。
來源:鎂客網
本文地址:http://m.155ck.com/news/qiye/93369
以上內容轉載自鎂客網,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號