專業智能汽車咨詢機構“睿思齊”曾做過一次調研,結果顯示親自體驗過智能駕駛的消費者,認為“自己身邊喜歡使用輔助駕駛的人”占比要遠高于尚未接觸過智能駕駛的消費者,對智駕功能的發展趨勢也更為樂觀。
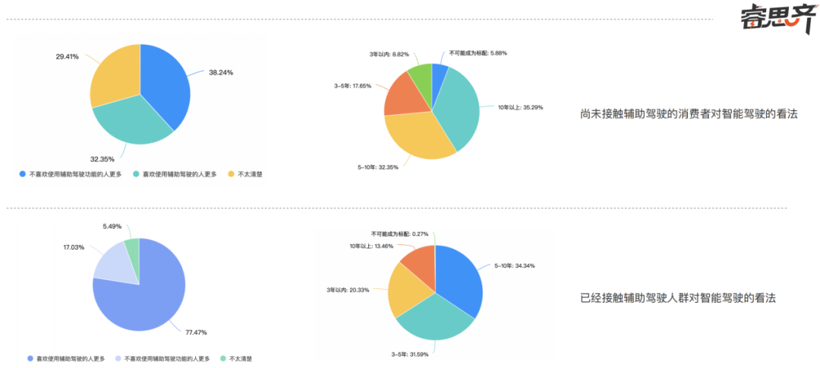
這說明使用過智駕功能的用戶,多數都能感受到這項功能帶來的價值感,而沒有體驗過智能駕駛功能的用戶對智駕的不信任感會更強一些。
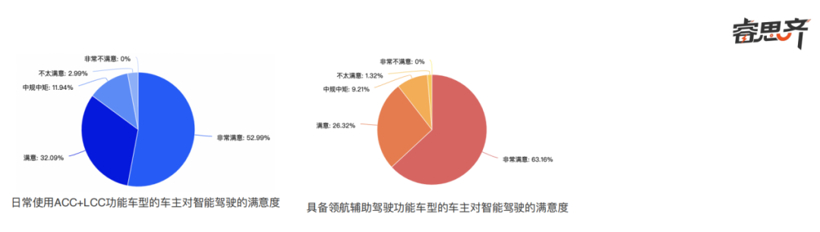
此外,睿思齊的調研報告中還有一項數據,具備領航輔助駕駛功能車型的車主,對智駕功能的滿意度要高于僅有基礎L2輔助駕駛功能車型車主對智駕的滿意度。
換句話來說,現階段影響智能駕駛,特別是高階智能駕駛發展最重要的問題,其實是如何讓更多的人能日常體驗上這項新技術。
這幾年智駕行業已經實現了從“卷功能”到“卷體驗”的升級,下一步就得是“卷成本” 了,只有把成本打下去,才能讓更多的消費者體驗到高階智駕功能帶來的出行體驗升級。
所以在前不久的上海車展上,我格外留意那些“卷成本”的選手,感覺其中最卷的就是輕舟智航,直接開發了“6V1R視覺方案”的高速NOA,以及基于單顆地平線征程5+單顆激光雷達的城市NOA兩套方案的實車體驗。
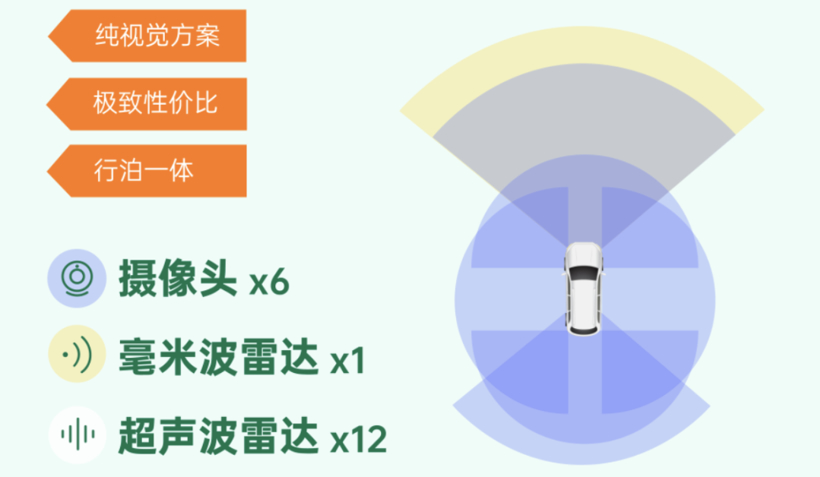
6V1R意味著只有6顆攝像頭,前視慣用的三目、雙目也變成了單目。最關鍵的還是取消了側前側后的四顆中長焦攝像頭,而之前只能用來泊車的魚眼攝像頭則擔起了大梁,為高速NOA提供側前側后的視野。
實際體驗下來,輕舟智航的這套6V1R方案變道時對側后車輛的感知非常及時,變道時機的選擇恰到好處,很符合心理預期,基本上我人判斷該變道了,而且系統符合變道條件的情況下,車輛也會很及時地執行并完成變道。
在車展前夕,我也實車體驗了基于單顆地平線征程5和單激光雷達的城市NOA方案,這套方案已經能夠打通城市、高速/高架、泊車三大場景,連很難解決的高速ETC也能自動通過,真正做到了無縫連接的全場景NOA體驗。
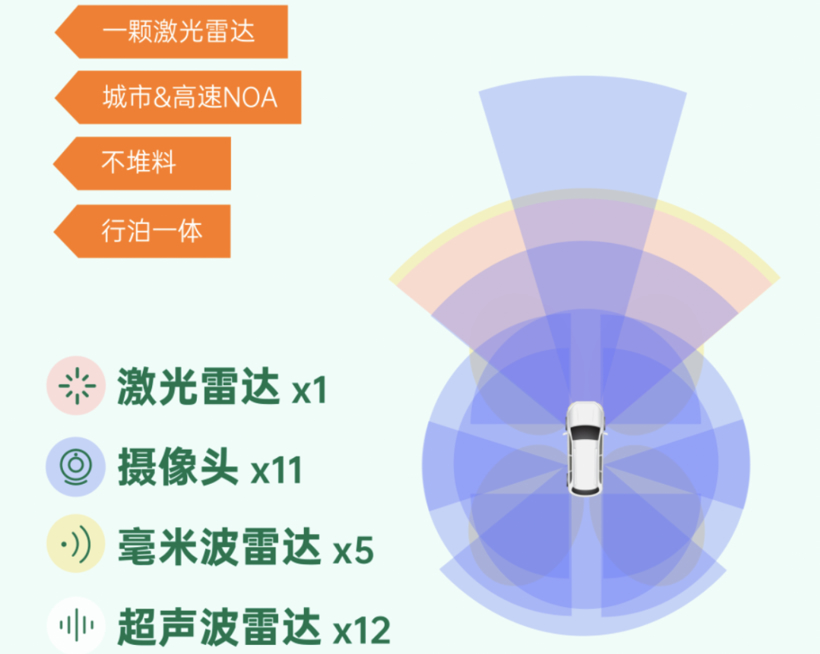
在算力和感知硬件上,輕舟這套單激光雷達版本的城市NOA方案無需多個激光雷達的堆疊,但功能完整性上絲毫不輸市面上其他已經量產交付的城市NOA功能,能夠保障保障城市NOA復雜場景體驗 (多目標博弈,復雜路口通行,一般障礙物檢測繞行),能夠及時理解當前環境,并做出符合駕駛員心理預期的響應。

特別是繞行場景,輕舟智航的這套城市NOA方案繞行非常果斷,即便是跟車時,前車突然減速停車,系統也能及時地提前找機會變道,避免跟著前車停車后再緩慢向相鄰車道挪動帶來安全風險。
總體來說,輕舟智航這兩套高階智駕解決方案都已經用比較極致的成本,實現不輸現階段那些“堆料”方案的體驗。這就有點像半導體產業的發展,降低成本并不是靠犧牲性能來實現的,反而是在有限的硬件上壓榨出更高的利用率,從而實現了性能的提升。
輕舟,是想駛過萬重山的
“降本”基本上已經成為高速NOA功能現階段的主要課題了,除了輕舟的6V1R方案,車展上見到占比最高的還有各家推出的5V5R方案。
5V5R就是依靠前視單目挑大梁,而側前側后的感知主要交給角毫米波雷達,這樣的好處在于整體算法模型的規模也小一些,對芯片算力的需求較低,基本在10TOPS左右。
輕舟智航的6V1R方案的智駕計算芯片使用地平線的征程5,算力128TOPS,相對于5V5R的方案,域控的成本會更高一些,但省去了4顆角毫米波雷達的成本,所以綜合來看,成本上差異并不大。

輕舟智航的CTO侯聰描述這套6V1R方案是:“更低的邊際成本,獲得極高的邊際收益”。
這句話很清晰地解釋清楚了輕舟6V1R方案和5V5R方案的差異,雖然都是實現高速NOA的極致性價比方案,但兩者實際上是兩條截然不同的路。6V1R選擇了現階段成本較高,但更容易隨規模效應而大幅降本的芯片,5V5R則是選擇當下供應較為穩定,但降本空間已經比較有限的角毫米波雷達。
6V1R的重點在于視覺感知算法,把魚眼攝像頭也納入到行車的感知結果中,做到傳感器和計算芯片都能復用的行泊一體,同時通過正后方的攝像頭實現對后方中遠距目標的感知,用最優的成本實現無盲區的360°感知。
輕舟智航基于這套硬件能夠部署BEV框架,為智能駕駛決策提供更豐富的輸出,也讓這套方案擁有極高的能力體驗上限,這也是侯聰所說“極高的邊際收益”。

魚眼攝像頭雖然天生就具備BEV拼接的優勢,很早就在泊車場景下,為駕駛員提供一個便于掌握車輛與環境相對位置關系的可視化界面,但由于畸變的畫面,較近的感知距離,很少被用到行車中。
魚眼攝像頭就像是螃蟹,乍看起來不會是好的食材,但只要挖掘出它的優勢,以及適合的處理方案,第一個吃螃蟹的人就一定能開啟一個新的美食風潮。
所以雖然都是性價比方案,但6V1R通過傳感器復用,和搭上BEV的快車,相較5V5R方案擁有更高的體驗上限,更長的生命周期。
極致的降本,背后是極強的軟件能力
6V1R是輕舟智航對“傳感器復用”的思考,單激光雷達和單征程5芯片的城市NOA方案則展示出輕舟智航對降本的第二層理解:通過軟件能力,提高硬件利用率。
首先是激光雷達,輕舟智航通過自研的OmniNet在內的感知算法,能夠充分壓榨激光雷達的感知能力,通過逐層遞進的噪聲過濾方案,能夠最大限度地排除雨霧、泛光等噪聲對感知的干擾,提高對車輛、行人、小動物、異形障礙物等目標的識別精度。

簡單來說就是利用時序融合,把一顆激光雷達不同時序的感知結果做融合,一幀畫面可能有偶然性,可能被干擾,多幀融合可以消除這些偶然性,從而提升感知結果的感知精度。這在手機拍照上已經非常成熟,各個廠家都在通過多幀融合提升成像質量,從而發揮出硬件的最大價值。
OmniNet是輕舟智航提出的國內首個量產計算平臺實現視覺、激光雷達和毫米波雷達特征和時序融合的大模型,能夠通過多傳感器融合,多時序融合來提升感知精度,節省算力資源。
為了更高效地利用算力,輕舟智航很早就和地平線團隊建立合作,圍繞征程5芯片做適配開發,優化模型來提高算力的利用率,從而依靠單顆征程5芯片也能良好完成復雜場景下的感知和決策規劃,實現極致性價比的城市NOA功能。
輕舟智航對激光雷達的壓榨還不止于此。
輕舟智航作為L4級自動駕駛的明星公司,比多數智能駕駛公司更早接觸激光雷達,對激光雷達的理解也非常深刻,特別是在模型訓練上充分發揮了激光雷達自帶環境深度信息的“真值”,用同一視角下的激光雷達點云和視覺攝像頭做自監督訓練,提升了模型訓練的效率。
簡單來說就像是,老師帶了一個班的同學,大家各有所長,有人擅長數學,有人擅長畫畫,老師就讓擅長數學的伙伴,輔導擅長畫畫的同學的數學作業,讓擅長畫畫的同學,輔導擅長數學的同學做美術作業,整個班級的學習效率就變高了,老師也更省事了。
除了“壓榨硬件”,輕舟智航還通過共用規控算法來實現降本,雖然輕舟智航有6V1R、11V5R等多個不同傳感器配置的方案,但在架構上都是相通的,能夠共用輕舟自研的感知和規控算法,降低成本的同時,最大化發揮數據的規模化效應。
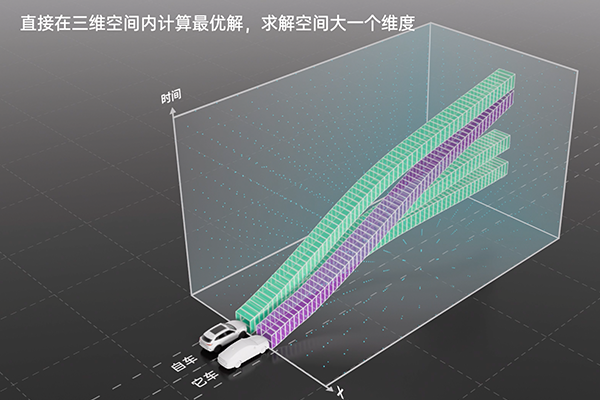
在感知上,輕舟智航有能融合視覺、激光雷達、毫米波雷達特征和時序的大模型OmniNet,規控上輕舟也有首創的“時空聯合規劃算法”,直接在空間和時間中求解最優軌跡,同時控制車輛方向和速度,在面對復雜場景時應對更加靈活。
寫在最后
NOA是一個用過就很難再回去的功能,這個功能也在購車決策中起到越來越重要的比重,NOA的價值已經被證明,成本則是制約這項功能提升滲透率的最大包袱。
輕舟智航通過多套方案的展示,打響了高階智駕普及的槍聲,期待這樣的方案能夠大規模普及,讓我們能有更豐富的智能汽車選擇。
來源:AutoLab
作者:白楊
本文地址:http://m.155ck.com/news/shichang/202406
以上內容轉載自AutoLab,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號