蓋世汽車訊 機器人和自動駕駛汽車是技術領域中增長最快的領域之一,或將使工作和交通變得更安全、更高效。由于機器人和自動駕駛汽車都需要準確感知周圍環境,因此3D物體檢測方法研究領域備受關注。
大多數3D物體檢測方法都采用LiDAR傳感器來創建其環境的3D點云。簡而言之,LiDAR傳感器使用激光束快速掃描和測量源周圍物體和表面的距離。然而,由于激光雷達對噪聲的高敏感性,單獨使用激光雷達數據可能會導致錯誤,特別是在降雨期間等惡劣天氣條件下。
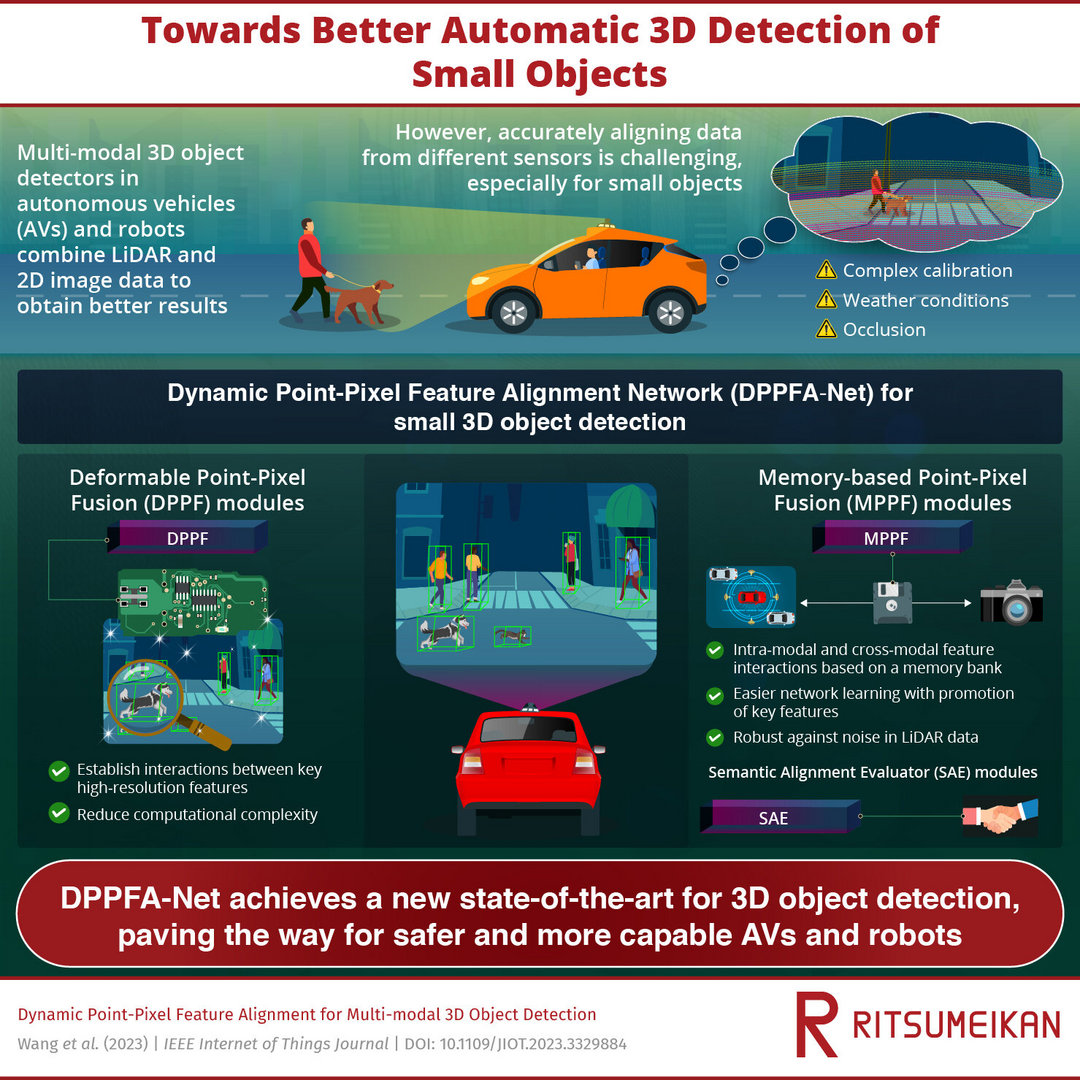
為了解決這個問題,科學家們開發出多模態3D物體檢測方法,將3D LiDAR數據與標準攝像頭拍攝的2D RGB圖像相結合。雖然2D圖像和3D LiDAR數據的融合可以帶來更準確的3D檢測結果,但它仍然面臨著一系列挑戰,精確檢測小物體仍然很困難。由于校準不精確或遮擋等問題,如何充分對齊從2D和3D數據集中獨立提取的語義信息很難。
據外媒報道,在此背景下,由日本立命館大學(Ritsumeikan University)Hiroyuki Tomiyama教授領導的研究團隊開發出創新方法,使多模態3D物體檢測更加準確和且具有魯棒性。相關論文已發表于期刊《IEEE Internet of Things Journal》,該方案名為《動態點像素特征對齊網絡(Dynamic Point-Pixel Feature Alignment Network,DPPFA?Net)》。
來源:第一電動網
作者:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/216118
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號