蓋世汽車訊 即使讓機器人完成一項簡單的任務(wù),也需要進行大量的幕后工作,其中一部分挑戰(zhàn)是計劃和執(zhí)行動作,如轉(zhuǎn)動輪子和舉起機械臂。為了實現(xiàn)這一目標,機器人專家與程序員合作開發(fā)出一套無障礙、可供機器人使用的軌跡或路徑。據(jù)外媒報道,卡內(nèi)基梅隆大學(xué)(Carnegie Mellon University)機器人研究所(RI)的研究人員正在開發(fā)新的方法以繪制這些軌跡。
(圖片來源:卡內(nèi)基梅隆大學(xué))
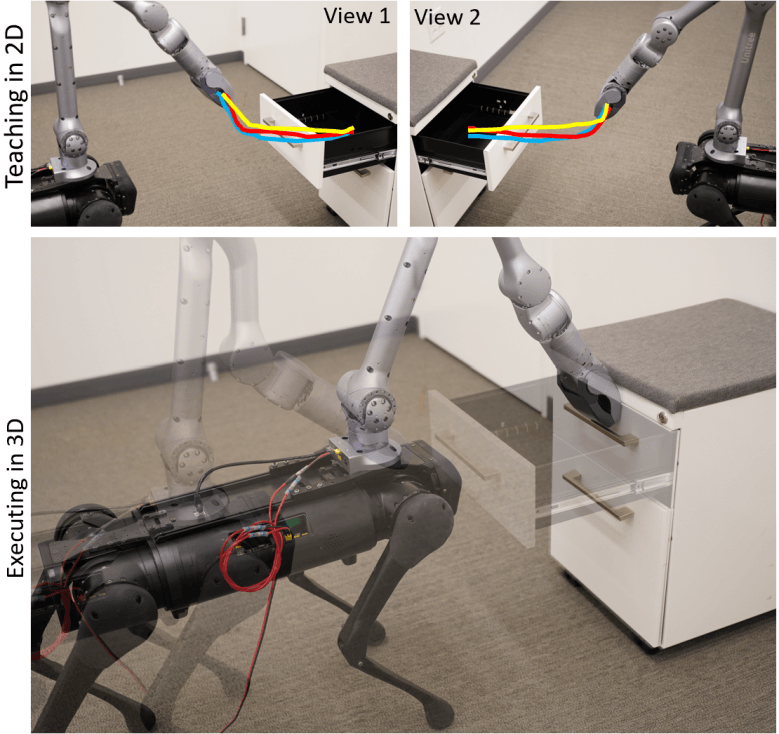
RI博士后研究員William Zhi等人提出使用草圖向機器人展示如何移動的方法。該團隊將在日本橫濱舉行的IEEE國際機器人與自動化會議(IEEE International Conference on Robotics)上展示他們的工作。Zhi表示:“傳統(tǒng)的機器人運動軌跡生成方法需要對機器人進行特定的編程。人類可以通過草圖推斷復(fù)雜的指令,我們希望機器人也能做到這一點。”
最近已有探討使用自然語言來控制機器人的初步工作,但研究人員主要是測試不同的方法來教機器人通過演示進行學(xué)習(xí)。有兩種主要的方法可以做到這一點,一種方法依賴于動覺教學(xué),即人類記錄機器人走到哪里,然后對機器人進行物理調(diào)整,將其關(guān)節(jié)置于所需的位置;另一種方法是遙操作,用戶通過專用的遙控器或操縱桿來操作機器人,然后記錄演示過程以供機器人模仿。
來源:第一電動網(wǎng)
作者:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/230302
以上內(nèi)容轉(zhuǎn)載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯(lián)系admin#d1ev.com(#替換成@)刪除,轉(zhuǎn)載內(nèi)容并不代表第一電動網(wǎng)(m.155ck.com)立場。
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經(jīng)成功提交我們稍后會聯(lián)系您進行報價!

 京公網(wǎng)安備
11010502033163號
京公網(wǎng)安備
11010502033163號