蓋世汽車訊 為了在家庭環境、辦公室和公共場所完成現實任務,機器人應該能夠有效地抓取和操縱各種物體。近年來,開發人員創建了各種基于機器學習的模型,旨在使機器人能夠熟練地操縱物體。
雖然其中一些模型取得了良好的效果,但為了表現良好,它們通常需要在大量數據上進行預訓練。用于訓練這些模型的數據集主要由視覺數據組成,例如帶注釋的圖像和使用攝像機拍攝的視頻片段,但有些方法也會分析其他感官輸入,例如觸覺信息。
據外媒報道,卡內基梅隆大學(Carnegie Mellon University)和歐林工程學院(Olin College of Engineering)的研究人員最近探索使用接觸式麥克風代替傳統觸覺傳感器的可能性,從而能夠使用音頻數據來訓練用于機器人操控的機器學習模型,可能為這些模型的大規模多感官預訓練開辟新的機會。相關論文發表在arXiv預印本服務器上。
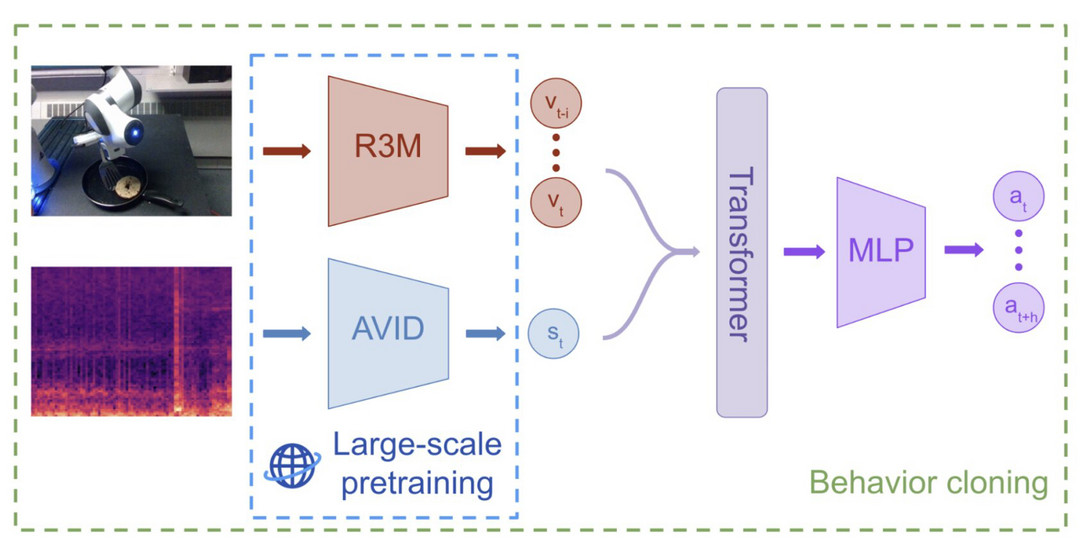
圖片來源:卡內基梅隆大學
來源:第一電動網
作者:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/232549
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號