得益于特斯拉的標(biāo)桿引領(lǐng)作用,自動(dòng)駕駛領(lǐng)域正掀起一股端到端布局熱潮。
縱觀市場(chǎng),當(dāng)前以蔚來、小鵬、理想等為代表的整車廠,以及元戎啟行、商湯絕影、小馬智行、鑒智機(jī)器人等在內(nèi)的自動(dòng)駕駛產(chǎn)業(yè)鏈公司,都在爭(zhēng)相研發(fā)端到端自動(dòng)駕駛,以實(shí)現(xiàn)更出色的智駕體驗(yàn),以及功能進(jìn)階。
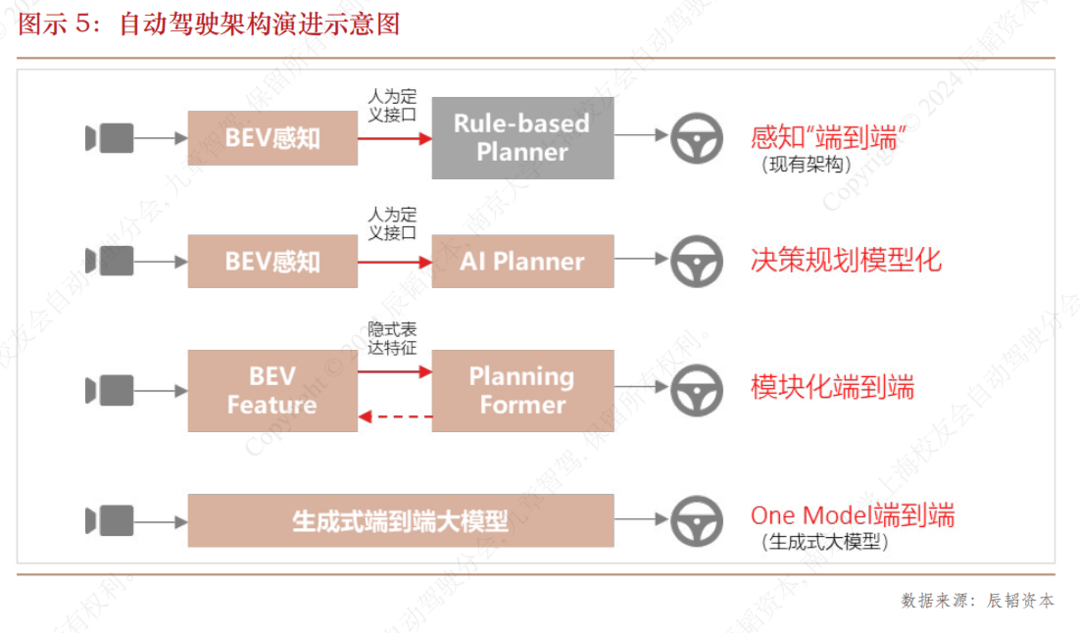
據(jù)辰韜資本聯(lián)合南京大學(xué)上海校友會(huì)自動(dòng)駕駛分會(huì)、九章智駕共同發(fā)布的《端到端自動(dòng)駕駛行業(yè)研究報(bào)告》顯示(以下簡(jiǎn)稱《報(bào)告》),基于自動(dòng)駕駛行業(yè)頭部玩家紛紛提出端到端量產(chǎn)規(guī)劃,預(yù)計(jì)模塊化端到端系統(tǒng)將于2025年開始上車。
而真正的One Model端到端系統(tǒng),作為廣泛認(rèn)定的端到端終局方案,由于需要更多模型、數(shù)據(jù)、訓(xùn)練算力和芯片層面的升級(jí),中性預(yù)期其落地時(shí)間會(huì)晚于模塊化端到端1~2年時(shí)間,從2026年至2027年開始上車量產(chǎn)。
圖片來源: 《端到端自動(dòng)駕駛行業(yè)研究報(bào)告》
這背后,端到端因?yàn)榭梢詫?shí)現(xiàn)感知、預(yù)測(cè)、規(guī)劃三個(gè)模型的高度融合,并通過海量數(shù)據(jù)持續(xù)訓(xùn)練算法,讓機(jī)器擁有自主學(xué)習(xí)、思考和分析的能力,可以更好地處理復(fù)雜的駕駛?cè)蝿?wù),從而帶來自動(dòng)駕駛體驗(yàn)提升。
以特斯拉為例,其城市NOA軟件FSD 以前版本只有 2% 左右的訂閱率,但是自 2024年3月特斯拉開啟引入了“端到端神經(jīng)網(wǎng)絡(luò)”技術(shù)的FSD v12大規(guī)模推送和免費(fèi)試用后,據(jù)馬斯克透露,其訂閱率有大幅度提升。
不僅如此,由于該算法架構(gòu)的強(qiáng)泛化性,端到端還被認(rèn)為有可能驅(qū)動(dòng)自動(dòng)駕駛跨車型、跨地理區(qū)域、跨國(guó)家、跨場(chǎng)景的應(yīng)用,在智駕出海中將大有可為,甚至催生新的產(chǎn)業(yè)分工和商業(yè)模式。
不過,盡管端到端在自動(dòng)駕駛領(lǐng)域應(yīng)用前景廣闊,這一全新架構(gòu)面臨的落地挑戰(zhàn)亦不容忽略。
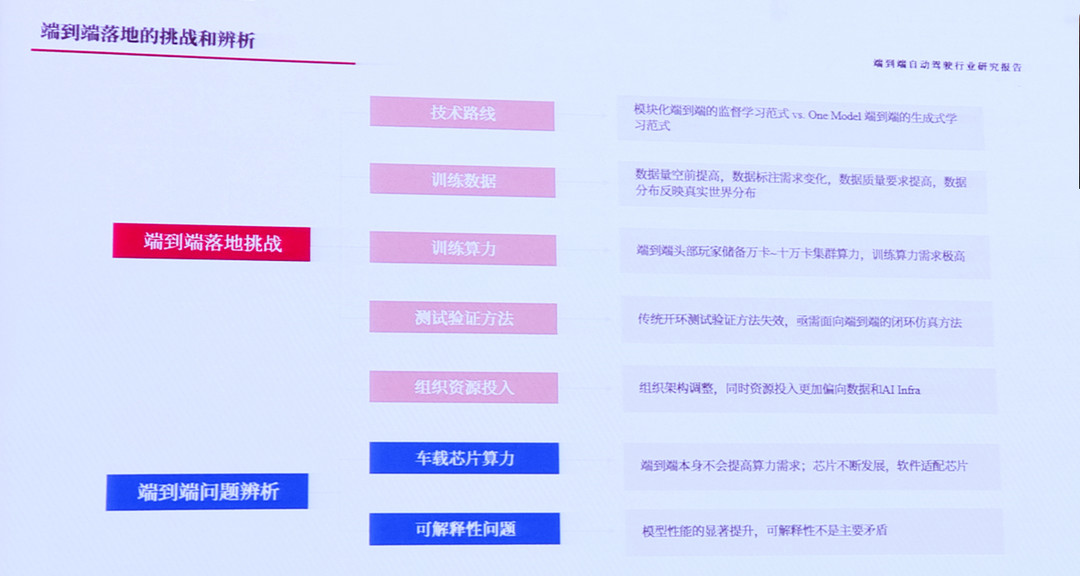
《報(bào)告》指出,目前端到端自動(dòng)駕駛在落地方面主要面臨技術(shù)路線分歧、對(duì)訓(xùn)練數(shù)據(jù)需求量空前提升、對(duì)訓(xùn)練算力需求越來越高、測(cè)試驗(yàn)證方法尚不成熟、組織資源重塑等多重挑戰(zhàn)。
圖片來源:辰韜資本
在技術(shù)路線方面,現(xiàn)階段無論是“ 模塊化端到端”還是面向終局的“One Model 端到端” ,都有相應(yīng)的追隨者,并且由于行業(yè)內(nèi)尚未出現(xiàn)可供參考的最佳實(shí)踐案例,預(yù)計(jì)這種路線分歧還將持續(xù)一段時(shí)間。未來 1~2 年內(nèi),隨著更多公司和研究機(jī)構(gòu)在端到端領(lǐng)域加大投入并推出產(chǎn)品,技術(shù)路線才會(huì)逐漸收斂。
數(shù)據(jù)方面,端到端自動(dòng)駕駛更是在數(shù)據(jù)量、數(shù)據(jù)標(biāo)注、數(shù)據(jù)質(zhì)量和數(shù)據(jù)分布等多個(gè)維度提出了更高的要求。小馬智行 CTO 樓天城就表示,現(xiàn)階 段,訓(xùn)練出一個(gè)一般性能的端到端模型,自動(dòng)駕駛的數(shù)據(jù)量已經(jīng)不是一個(gè)問題; 但是要訓(xùn)練出一個(gè)高性能的端到端模型,對(duì)數(shù)據(jù)的質(zhì)量要求可能是幾個(gè)量級(jí)的提 升,這是自動(dòng)駕駛行業(yè)都會(huì)面臨的挑戰(zhàn)。
而在算力需求方面,特斯拉曾在2024Q1 財(cái)報(bào)電話會(huì)上表示,公司已經(jīng)有35000張 H100 GPU,并計(jì)劃在2024年內(nèi)增加到85000張H100以上,但國(guó)內(nèi)主機(jī)廠和自動(dòng)駕駛公司的訓(xùn)練算力,目前鮮有企業(yè)能達(dá)到特斯拉的規(guī)模。
另外,測(cè)試驗(yàn)證方面,現(xiàn)有測(cè)試驗(yàn)證方法不適用于端到端自動(dòng)駕駛,行業(yè)亟需新的測(cè)試驗(yàn)證方法論和工具鏈;組織資源投入方面,端到端需要組織架構(gòu)重塑,也需要將資源投入傾斜到數(shù)據(jù)側(cè),對(duì)現(xiàn)有模式提出挑戰(zhàn)。
也正因如此,盡管業(yè)界已經(jīng)對(duì)端到端重構(gòu)自動(dòng)駕駛形成普遍共識(shí),目前的量產(chǎn)方案大多仍停留在“決策規(guī)劃模型化” 階段,距離模塊化端到端或 One Model 端到端自動(dòng)駕駛真正規(guī)模化落地還有一段距離。
來源:第一電動(dòng)網(wǎng)
作者:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/233688
以上內(nèi)容轉(zhuǎn)載自蓋世汽車,目的在于傳播更多信息,如有侵僅請(qǐng)聯(lián)系admin#d1ev.com(#替換成@)刪除,轉(zhuǎn)載內(nèi)容并不代表第一電動(dòng)網(wǎng)(m.155ck.com)立場(chǎng)。
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請(qǐng)聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價(jià)再買車,買的放心開的安心
您的詢價(jià)信息
已經(jīng)成功提交我們稍后會(huì)聯(lián)系您進(jìn)行報(bào)價(jià)!

 京公網(wǎng)安備
11010502033163號(hào)
京公網(wǎng)安備
11010502033163號(hào)