蓋世汽車訊 隨著ChatGPT和其他大語言模型(LLM)的公開發布,世界各地的開發人員開始嘗試利用這些模型來增強自己系統的交互能力。然而,類似的可通用機器人操控模型仍然很少。據外媒報道,最近,加州大學伯克利分校(UC Berkeley)、斯坦福大學(Stanford University)和芝加哥大學(CMU)的研究人員推出開源機器人操作通用模型(generalist model)——Octo,可以讓不同的機器人系統有效地操控各種對象。這一模型是在arXiv服務器上預先發布的一篇論文中提出的,或將為開發可以處理手動任務的機器人開辟新的途徑。
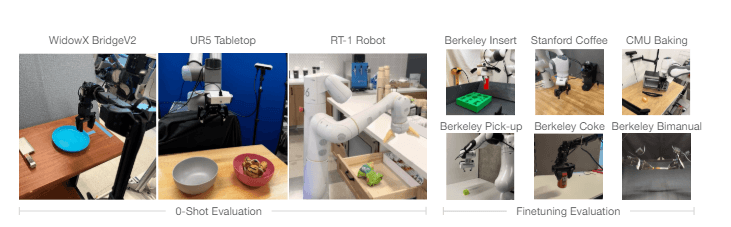
(圖片來源:arxiv.org)
該團隊表示,目前人工智能領域的大部分進展均由大型數據集和大模型推動。在機器人社區,團隊研究人員近期組裝了Open X-Embodiment數據集,這是一個匯集了許多研究機構的數據的大型操作數據集。雖然該新數據集資源令人激動,但當時可以利用它的模型還不是很多。
來源:第一電動網
作者:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/234536
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號