對于理想AD Max用戶來說,今天絕對是一個值得慶祝的日子。
理想汽車在今天正式召開了智能駕駛夏季發布會,主要內容包含了:
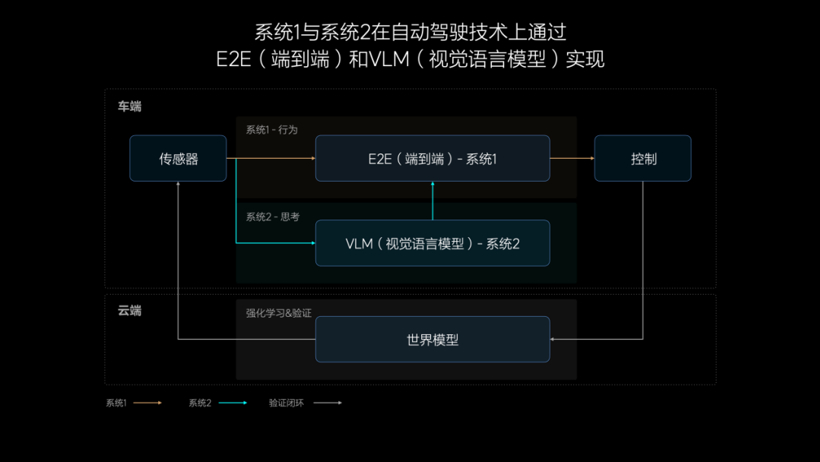
- 基于端到端模型、VLM視覺語言模型和世界模型的全新自動駕駛技術架構;
- 將于7月內推送的全自動AES和全方位低速AEB。

其中,端到端模型、VLM視覺語言模型和世界模型是理想AD Max的全新技術,這項技術能夠幫助理想汽車智能駕駛擺脫對先驗信息的依賴,在全國范圍內實現有導航覆蓋即可使用NOA。
而全自動AES和全方位低速AEB,則能夠讓理想AD Max在更多場景下實現更好的主動安全能力。
下面我們一項一項來看。
首個雙系統架構方案
大多數人今天關注的重點是理想的全新的雙系統技術架構,早在近一個月前的「2024中國汽車重慶論壇」上,李想就分享了這套理想汽車的最新技術架構。
理想團隊在一本書《思考,快與慢》中得到啟示:
我們人類的大腦日常在工作的時候,分為系統一和系統二。系統一來處理一些需要直覺和快速響應的事情。系統二處理比較復雜的邏輯推演工作。
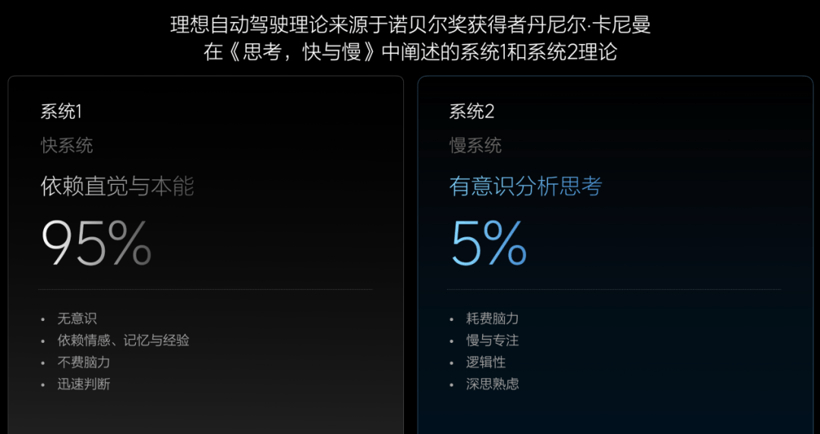
代入到人類的駕駛行為,日常近95%的駕駛任務是不需要推演的,開車時腦子里甚至還可以想其他事情,這時候大腦并不是沒有工作,而是以一種低能耗的方式在工作。
但是當我們到了復雜路況時,比如遇到復雜的路口、多車混行的路段,我們的大腦就會調用系統二來工作,用它來處理比較復雜的邏輯推演的能力,雖然它對大腦消耗比較大,但我們不會一直以系統二的方式開車。
自動駕駛如果以人類的方式來開車,那么系統一和系統二對應的是什么?
理想汽車認為,現在行業在研究的端到端技術正是自動駕駛需要的系統一,它的效率很高,善于處理簡單任務,是人類基于經驗和習慣形成的直覺,足以應對駕駛車輛時95%的常規場景。
系統二則是理想率先基于 Orin-X 部署的 VLM 視覺語言模型,它更擅長邏輯推理、復雜分析和計算能力,在駕駛車輛時用于解決復雜甚至未知的交通場景,占日常駕駛的約5%。
系統一和系統二的相互配合,分別確保大部分場景下的高效率和少數場景下的高上限,成為人類認知、理解世界并做出決策的基礎。
系統一,即端到端
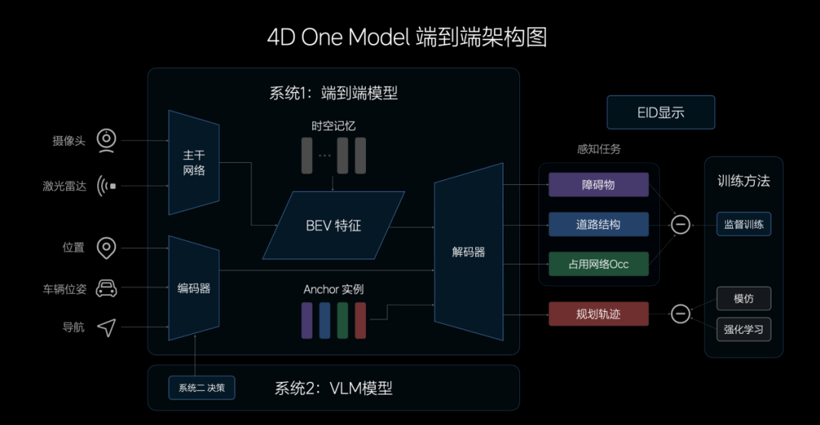
理想汽車的端到端輸入主要由攝像頭和激光雷達構成,多傳感器特征經過CNN主干網絡的提取、融合,投影至BEV空間。
為了提升模型的表征能力,理想汽車加入了記憶模塊,具備時間和空間的記憶能力。
在模型的輸入中,理想汽車還加入了汽車的狀態信息和導航信息,經過 Transformer模型的編碼,輸出感知任務,包含了動態障礙物、道路結構和通用障礙物等等,并規劃行車軌跡。
輸入感知信息,輸出規控軌跡,這是理想AD的系統一,端到端模型。
更擅長「讀圖」的VLM模型
VLM 視覺語言模型,通俗地說,這是一個擅長解讀照片的網絡。
我們都知道,自動駕駛感知主要輸入的是圖片,這是最重要的信息,但如何讓系統讀懂信息,這是最關鍵的一步。
VLM 模型相對來說更擅長這些場景理解,能識別和描述道路環境、交通標志、動態交通參與者等等。通過不斷的訓練,VLM能夠進行自主推演。例如交警的手勢,大多數模型架構是無法解決「讀懂」的,甚至人的大腦都需要推理,但是VLM可以承擔這部分任務。
這就是為什么李想說,VLM是端到端很好的補充。
理想汽車的VLM視覺語言模型參數量達到22億,對物理世界的復雜交通環境具有強大的理解能力,許多場景即便是第一次經歷,也能夠很好地化解。
再舉個例子,VLM模型可以理解公交車道、潮汐車道和分時段限行等復雜的交通規則,在駕駛中作出合理決策。
可以說,VLM給端到端在給端到端這種不可加規則的模型進行了很好的兜底。
但是,VLM本身也是黑盒,理想為了驗證雙系統的安全性,用 Diffusion Transformer 的方式來構建一個重要的、小型的世界模型,拿到這個世界模型,讓車在里面考試。
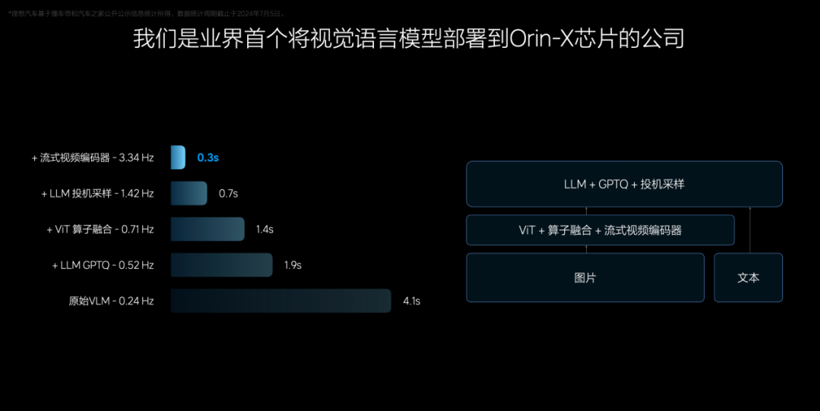
理想汽車結合端到端模型和VLM視覺語言模型,成為了首個在車端部署雙系統的方案,也首次將VLM視覺語言模型成功部署在車端芯片(Orin-X)上。
主動安全
看完了發布會,我對理想智駕的印象只有一個字,那就是卷。不僅僅是城區NOA的前瞻研發和工程化落地,在主動安全上,理想也把場景和功能類型做到了非常豐富和完備。
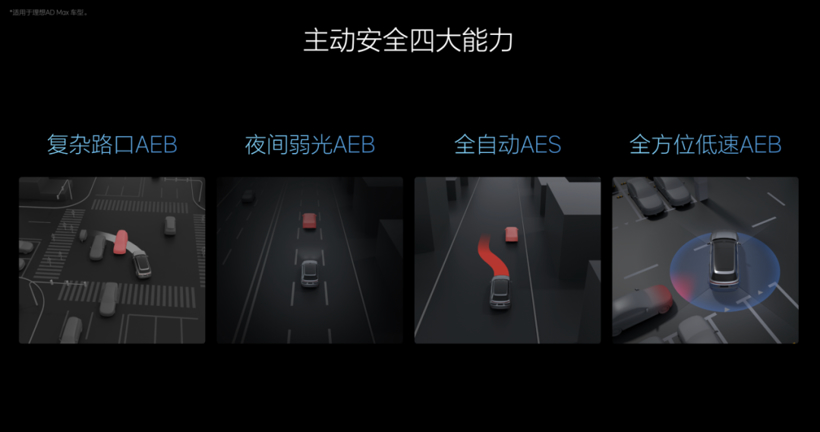
理想的主動安全包含了四大能力,分別是復雜路口的AEB、夜間弱光AEB、全自動AES和全方位低速AEB。
我們分別來看這四大場景的能力和價值。
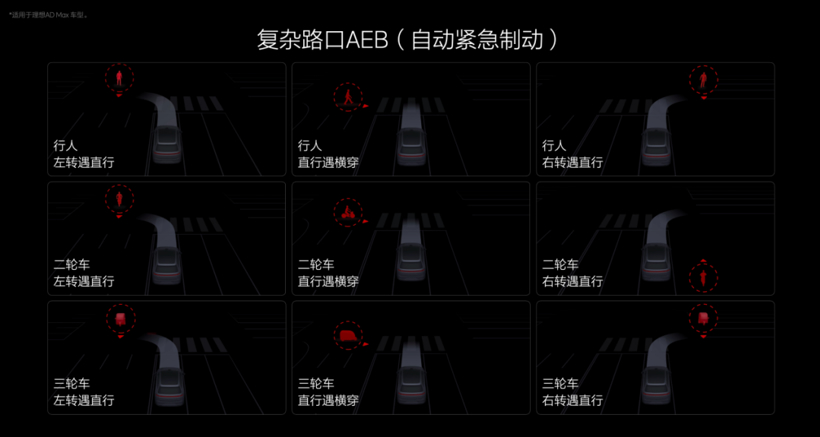
復雜路口指的是當我們在人車混行的轉彎行駛時,尤其是轉彎時,駕駛員的視線是存在盲區的,這時候主動AEB就能夠幫助駕駛員規避風險。
尤其是橫穿的兒童,這是典型的高危場景。
夜間弱光環境下,駕駛員視線會受到嚴重干擾,尤其是在閃著燈的龍門架下,更是一個難解的場景。理想這次也針對夜間暗光環境做了升級,確保功能極限夠高。
全自動AES(自動緊急轉向)指的是,在車輛行駛速度較快時,留給主動安全系統的反應時間極短,部分情況下即使觸發AEB,車輛全力制動仍無法及時剎停。這個時候,AES功能將被及時觸發,無需人為參與轉向操作,自動緊急轉向,避讓前方目標,從而避免碰撞的發生。
最后一項,全方位全方位低速AE則針對泊車和低速行車場景。

在我們日常泊車時,停車場可能存在一些低矮的障礙物,甚至會出現兒童,全方位低速AEB能夠識別前向、后向和側向的碰撞風險,及時緊急制動,避免碰撞發生。
以上這些功能,都會在7月推送給用戶。

在這里理想汽車也分享了一組數據,在202年上半年,理想汽車AD Max主動安全系統已經顯著降低了人類駕駛事故率:人類駕駛事故率降低30%、人類駕駛事故避免36萬起、AEB誤觸發率每30萬公里小于1次。
寫在最后
今天的發布會全程圍繞智駕,并且在看完后,我相信大多數人都有兩點感觸。
第一,過去我們國內OEM與智駕供應商提出的技術,都是特斯拉在AI DAY上和CVPR上已發布的技術。
在智駕前瞻技術上,我們一直是跟隨的角色,但是理想今天的技術,讓行業獲得了久違的新鮮感,我們要鼓勵前瞻技術的探索和工程落地。
第二,我們的新勢力一直在卷主動安全,這是最不怕卷的領域,消費者需要更好、更強的主動安全能力。
什么是卷出價值?這就是最好的詮釋。
來源:第一電動網
作者:AutoLab
本文地址:http://m.155ck.com/news/shichang/236653
以上內容轉載自AutoLab,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號