
申請技術丨多傳感器融合感知技術方案
申報領域丨智能駕駛
獨特優勢:
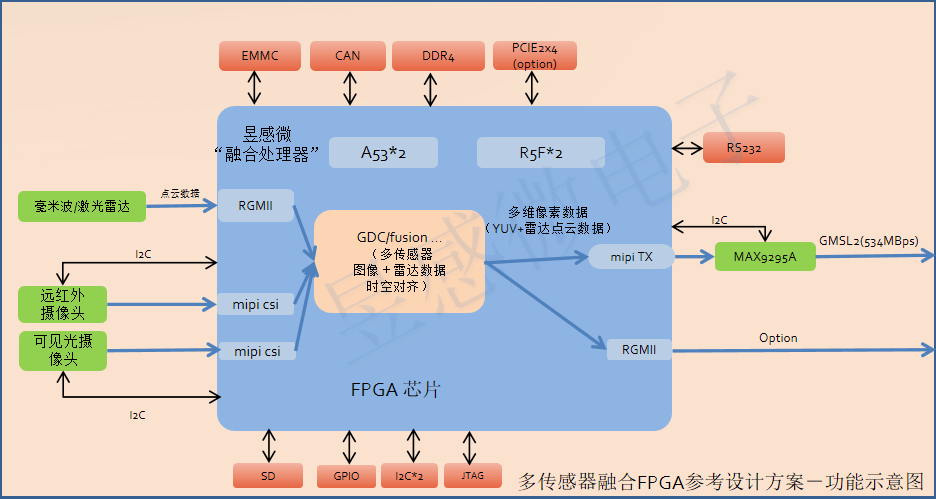
感知智能一直是L3/L4級自動駕駛的技術難點,而單一的傳感器始終受到天氣/光線/應用場景以及自身局限性限制,無法做到全面精準的感知目標和環境。昱感微將可見光攝像頭、紅外攝像頭以及雷達的探測數據在前端(數據獲取時)融合,將各傳感器的探測數據“坐標統一、時序對齊”,圖像與雷達數據完成像素級實時“時空對齊同步”并以“多維像素”格式輸出,可以很好地解決感知側的技術痛點。
昱感微的融合感知技術方案的優勢在于:
1)是基于“物理感知”數據驅動,能很好地避免純視覺神經網絡的corner cases問題;
2)傳感器前融合的方式可以最大限度地保留原始探測數據,并發揮各傳感器的優勢,使感知系統能夠不受天氣光線和場景的限制,實時完成精準目標感知;
3)支持目標的識別與樣本采樣同步完成,助力車廠建立數據優勢。昱感微融合感知系統內含一個專用的數據獲取模塊,將目標的識別與有效樣本的獲取結合,可提供有效樣本的獲取函數,配合車廠開發。特斯拉FSD的成功離不開特斯拉的海量數據優勢,昱感微的融合感知技術的感知數據將助力中國車企在自動駕駛賽道上實現彎道超車,領先特斯拉FSD,加速中國車企占領海外市場。 在客戶產品成本管理上,我們的方案所輸出的“多維像素”感知數據可以為客戶節省原本巨量的感知原始數據傳輸成本,并減輕客戶產品的核心算力成本(比如自動駕駛系統的中央域控單元)。并且,昱感微的“多維像素”與現有主流AI計算平臺完全兼容,它可以復用已有的圖像數據樣本,免除了產品的神經網絡訓練數據需要重新采集的困擾,使客戶能夠低成本高效地提升感知能力。
應用場景:
昱感微的多傳感器融合感知方案產品可應用于L3/L4級自動駕駛,除了乘用車外,還可應用于自動掃地車、自動農機等工業機器人。多維像素是基于“物理感知”數據驅動,能很好地避免純視覺神經網絡的corner cases問題,因此可以識別到路上的各種物體,不會出現沒有采樣過的目標就無法識別的情況。“多維像素”還能探測出路面的起伏,幫助自動駕駛系統對于不同的起伏程度采取對應的決策。“多維像素”還可以提供路面上覆蓋物的材質和狀況信息,對于探測到的較脆弱的材質或已損壞的覆蓋物就需要避讓。并且昱感微的融合感知方案完全不依賴高精地圖,對于沒有車道線和邊界的道路,自動駕駛系統也能根據“多維像素”提供的多模態感知信息來規劃路徑。此外,多傳感器融合感知精度可精確至5厘米,可以很好地滿足一些精確作業的要求。
未來前景:
昱感微的“多維像素”技術可以很好地支撐“端到端+VLM(視覺語言模型)+生成式的驗證系統”,還可以直接高效支持“占用網絡” (Occupancy Network)算法。占用網格是指將感知空間劃分為一個個立體網格(體素),而多維像素包含了目標的3D空間位置信息、目標的速度信息和材質信息,可以直接高效實時支持占用網格中的體素算法。特斯拉目前在主推“BEV +Transformer+占用網絡”,國內華為GOD2.0和小米汽車也采用相同的架構,預計未來許多智能駕駛團隊都會引入“占用網絡”來提升系統能力。多維像素的應用前景非常廣闊。昱感微的融合感知技術+BEV +Transformer+占用網格有望成為L3/L4級自動駕駛最優的落地方案。
金輯獎介紹:
“金輯獎”由蓋世汽車發起,旨在“發現好公司,推廣好技術,成就汽車人”, 并圍繞著“中國汽車新供應鏈百強”這個主題進行展開,本屆金輯獎重點聚焦智能駕駛、智能座艙、智能底盤、汽車軟件、車規級芯片、大數據及人工智能、動力總成及充換電、熱管理、車身及內外飾、新材料十大細分板塊,進行優秀企業及先進技術解決方案的評選,向行業內外展示這些優秀的企業和行業領軍人物,共同推動行業的發展和進步。
來源:第一電動網
作者:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/244061
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號