蓋世汽車訊 確保機器人能夠在現實環境中與人類順利協作是實現大規模部署的關鍵一步。雖然一些機器人系統已經能與人類代理進行日常互動,例如在部分自動化的工業和制造設施中,但日常任務中的人機協作仍然很少。
據外媒報道,意大利帕多瓦大學(University of Padova)和劍橋三菱電機研究實驗室(Mitsubishi Electric Research Laboratories,MERL)的研究人員開發出新框架,可幫助規劃涉及人機協作的任務。該框架相關論文已預先發表在arXiv服務器上,專門關注需要協作組裝復雜系統與各種底層組件(例如家具)的任務。
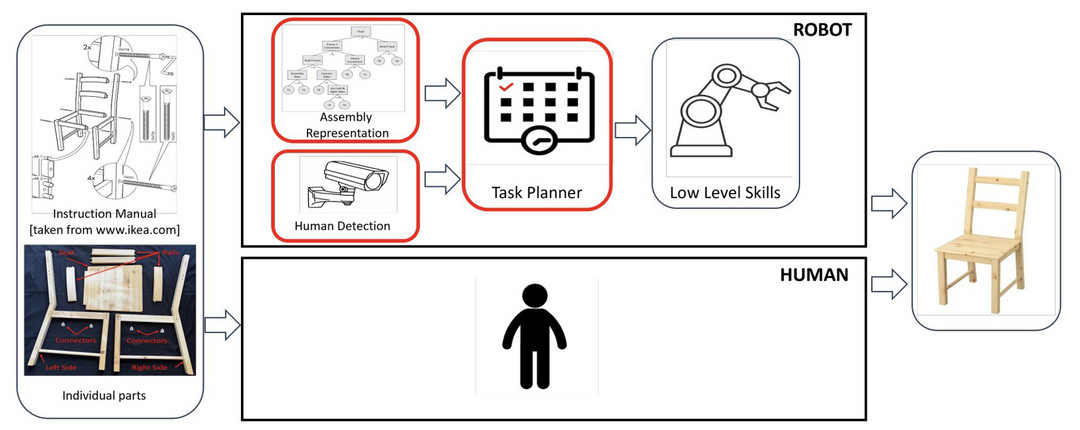
圖片來源:arXiv
研究人員將該框架稱為DECAF,即基于離散事件的家具人機協作裝配框架(Discrete-Event based Collaborative Human-Robot Assembly Framework for furniture)。DECAF具有各種底層組件,包括離散事件馬爾可夫決策過程(DE-MDP)模型、裝配過程的HTM描述和貝葉斯干擾(Bayesian interference)模塊。
來源:第一電動網
作者:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/247280
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號