
蓋世汽車訊?據外媒報道,美國卡內基梅隆大學(Crnegie Mellon University)國家機器人工程中心(Ntionl Robotics Engineering Center)參與了美國國防部高級研究計劃局(Defense Advnced Reserch Projects Agency,DARPA)的地面X車輛技術(Ground X-Vehicle Technologies,GXV-T)項目,從事新款車輪及人機自動駕駛系統的研發。
車輪變形技術(Shpe-Chnging Wheel Technology)
該款可重構車輪-履帶(reconfigurble?wheel-trck)既能發揮車輪的功效,又能充當三角形履帶,使車輛能夠在路面上高速行駛抑或是在穿越多種越野地帶(diverse off-rod terrins)。該款車輪可實現兩種模式的互換,其切換時間不足2秒,且可以邊行駛邊切換。

在迄今為止的各類測試中,配置了可重構車輪-履帶的軍用車輛在車輪模式和履帶模式下的車速分別為50英里/小時和近30英里/小時。該車輪從車輪模式向履帶模式切換時,車速仍高達25英里/小時,而從履帶模式向車輪模式切換時,車速近12英里/小時。
該款車輪-履帶理念的核心在于調節接地面積(contct ptch)——車輪-履帶與地面接觸區域的面積,這要視具體的路面類型及車輪載荷而定。若減少光滑面的接觸面面積,或許能提升車速。提升接地面積或能實現牽引力最大化,提升車輛在松軟土質地面上的行駛安全性。

該款可重構車輪-履帶擁有橡膠胎紋,內置了導輪架(wheel frme),可負責輪胎的變形。在早期的產品版本中,研究人員配置了電機,利用其電能推動輪胎的變形。然而,研究人員不久后發現,或許能利用輪胎-履帶本身的速度來推動車輪被動地變形,而非采用復雜的電機系統。
在最新的操作演示中,可將Y形支架拓展開,完成車輪的變形。同時,制動器的應用可阻止車輪旋轉。基于上述原理,借助其車輪內的齒輪配置,當六個導輪架撐起時,系統輪廓呈圓形車輪;而當導輪架向內收縮后,車輪就會變成三角形的履帶。
人機混合駕駛提升車速及車輛性能
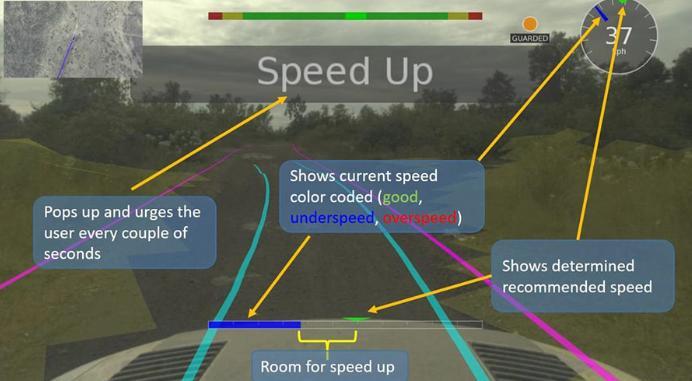
在ORCA項目中,研究人員研發了一款系統,可幫助駕駛員選擇最佳的行駛路徑,穿過“不毛之地(undeveloped lndscpe)”,并提醒駕駛員進行轉向、障礙物規避并告知前方有難行的地形。當駕駛員需要輔助時,可自動完成車輛的相關駕駛操作。
現場測試表示,這是人員與計算機并重的駕駛策略,據測量數據顯示,人機配合可將車速及駕駛員的表現提升20-30%。
在越野行駛時,駕駛員可利用視頻顯示屏查看周邊環境并完成駕駛操作。

該款在研發的自動駕駛系統可將人員行為與傳感器及其他數據相結合,計算最優化的路徑,然后提供有效的通信信息,不為駕駛員增加理解上的負擔。此外,該系統可在顯示屏上展示所需的視頻信息,不會提供令駕駛員感到困擾。
ORCA系統并不會像傳統導航系統那樣,簡單地發出操作指示,如:“在下個路口右轉”之類的指令。因為該車輛在是在越野環境下行駛,完全依賴于屏幕信息及地理坐標。
據稱,ORCA系統未來或將被用于民用車輛,為用戶提供路徑指引或借助抬頭顯示器,在風擋上合成道路標識。(本文圖片選自cmu.edu)
來源:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/79665
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號