
蔚來最近迎來了 NIO OS 2.3 的更新,最直觀的感受是選裝了 NIO Pilot 完整功能(以下簡稱 NP )的尊蔚主(尊貴的蔚來車主,買了 NP 的那種)們能直觀的通過動態儀表盤看到 NP 眼中的世界,而動態畫面中出現的和實際觀察不一致的情況,也引發了很多車主關于 NP 到底行不行的討論。
以下文字來自蔚來碳粉創始成員、魏雪芬家族元老、導彈專業畢業、資深通信狗「亞森羅賓」。
他從硬件與軟件兩個維度,就 OS 2.3 之后的 NIO Pilot 表現做了深度的分析,并對目前車主的一些疑問進行了解答。
特別提醒,蔚吹飲品,服用需謹慎!
以下,Enjoy!

先上結論:
1、NP 的動態儀表顯示的內容超出了我之前預期,也超出絕大部分廠商,僅次于特斯拉 AutoPilot(以下簡稱 AP )。
2、NP 是目前國內乘用車市面上能買到的僅次于 AP 的輔助駕駛,從功能上來說 AP 略> NP 略>ALL,而從潛力上來說 AP > NP >> ALL。

此圖版權屬于@雨
再提出幾個疑問:
1、為什么明明后面過來個電瓶車,顯示的卻是汽車,到前面又變回電瓶車?
2、為什么有時候側面會發生虛擬的「車禍」
3、為什么裝了箱子的美團電瓶車會被識別為卡車?
4、為什么顯示的車會來回晃動,為什么并排的車可能會不顯示?
5、碰到加塞的,交通流顯示出來加塞,車為什么沒采取措施?
6、NP 和 AP 到底有多少差距,我們到底需要多久才能趕上特斯拉?
接下來我們從硬件、軟件兩個維度分析。

1、基本邏輯
目前輔助駕駛的基本邏輯,就是模擬人的駕駛邏輯,可以簡單分為感知、決策、執行三個過程。
車載的傳感器負責感知(其實只負責接收信號):攝像頭——相當于人的眼睛;雷達——相當于人的耳朵;芯片負責感知和決策(將信號轉化、決策、和發出執行信號)——相當于人的大腦;電動車的電氣化架構又使得“執行”有著先天優勢,也是為什么電動車往往比油車輔助駕駛做的好的原因之一。
大家都知道,人類的眼睛是可以接收到具體的圖像來感知和構建這個世界,耳朵卻只能通過“聽音辨位”。而輔助駕駛最難的難點之一,就是通過傳感器感知周圍環境。
和生物的眼睛、耳朵不同的是,雖然很多攝像頭從參數上已經能超過人眼,但是人眼背靠大腦這個強大的后盾(俗稱腦補)從圖像處理能力上來說完勝世界上最精密的計算機,而人類還有肌肉這個神奇的東西能極大的增加兩只眼睛的可視范圍,所以機器需要用不同功能的攝像頭來彌補。
作為耳朵的雷達,比人類的耳朵多出距離感知甚至成像的能力。
2、攝像頭

攝像頭有個特性:看的遠的看不廣,看的廣的看不遠。
這就是為什么手機采用多攝方案,以達到又能拍攝長焦又能拍攝廣角的效果。而輔助駕駛如果用純攝像頭(視覺)方案,需要在車身上部署多個不同的攝像頭,來實現不同距離、不同范圍的視覺采集。
馬斯克的想法就是最大程度模擬人類駕駛一系列過程,攝像頭的好處就是和人眼一樣能直接生成圖像,從上面的圖里可以看出,攝像頭眼中的世界和我們人類看到的差不多。但是對于圖像中內容的提取和判別十分困難,需要大量的學習和訓練——這也是人工智能中最重要的一個分支。
視覺感知也有缺點,就像人眼一樣,在雨、霧等惡劣天氣、逆光等條件會受到比較強烈的干擾,并不一定能在“全天候”情況下使用。
3、雷達
為了解決人眼(同理攝像頭)可視距離短、受天氣等干擾的缺點,人類發明了雷達。雷達能感知的世界就純粹的多,也虛幻的多。雷達的原理很簡單,主要測量目標的三個參數:位置、速度和方位角。雷達眼中的世界基本上就如下圖。
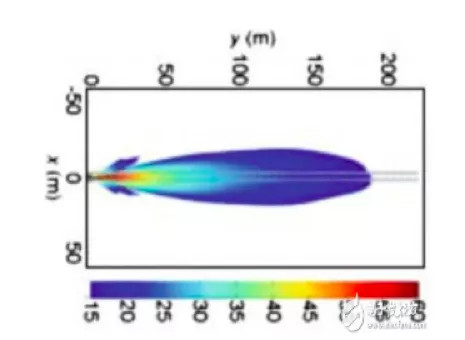
再轉換一下就如下圖。

當然,隨著技術的進步,在軍事上通過雷達信號特征(比如反截面積)來判斷不同物體,或者通過雷達成像技術來形成圖像(合成孔徑雷達、激光雷達),現在在研發中的車載毫米波雷達已經能看到下面這樣的圖像,可以很清晰的看到有一輛車開著車門這樣的信息。
目前車載主流采用的長距離雷達都是毫米波雷達,大家可能比較陌生,放一張圖大家就比較熟悉了,長弓阿帕奇頭頂的那個圓形的東西就是毫米波雷達,雖然原理一樣,但要比車載的強大無數倍。

而號稱高級別輔助駕駛必須的激光雷達,其實也有他的局限性。
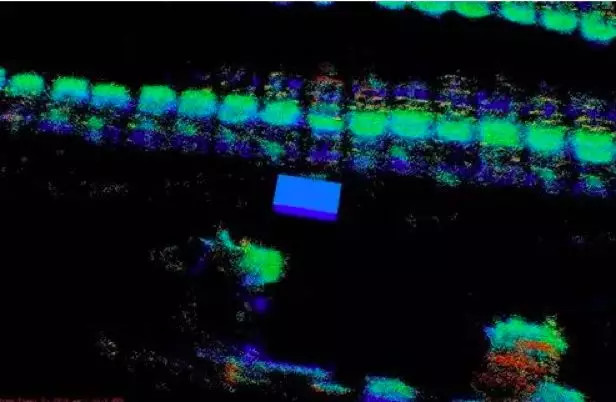
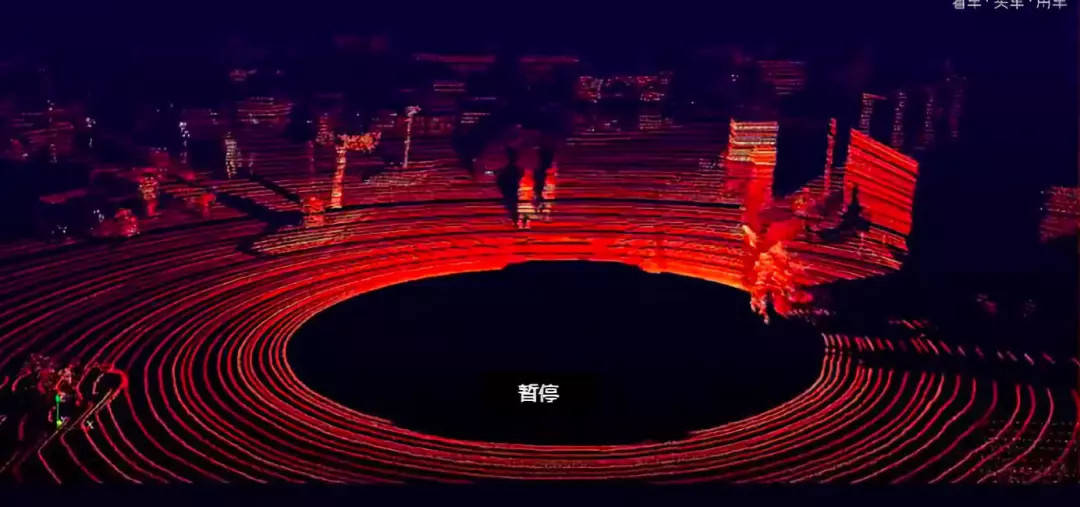
激光雷達的優點是分辨率高,從而能進行成像并構出物體的輪廓圖(下圖就是激光雷達眼中的世界),缺點(不說價格,說價格就是一輛車)是容易受雨霧天氣影響。
而毫米波雷達不受這些影響。但是雷達波反射金屬等物體比較好,對于人體、木頭等探測能力較弱,而且容易受到物體干擾,比如一個易拉罐可能會誤認為是車。
特斯拉擁有「7只眼睛」。
其中 3 只眼睛負責前向的視覺(類似人眼),裝在翼子板和 B 柱的 4 只眼睛負責側方和后方的視覺。而融合起來的視覺,除了正后方盲區以外,幾乎可以覆蓋全部周圍的視覺,正面的視覺最大可以達到250 米,主攝像頭可以 150 米,正面的視覺范圍大約是 150 度,而側方的攝像頭能觀察 80-100米 的距離,從而形成一個完整的空間感知。

蔚來的三只眼睛和特斯拉基本差不多,也能在前向 150 度和百米范圍觀察世界,但是剩下的范圍就需要通過四個角毫米波雷達來進行感知。
目前蔚來采用的角毫米波雷達還是市面常見的 24GHZ 雷達(別問成像雷達,問就是一輛車的錢),能探測距離、速度、角度。
這就解決了我們最上面的第一個疑問:為什么明明后面過來個電瓶車,顯示的卻是汽車,到前面才會變成電瓶車。
因為雷達只能感知側后方過來的物體,而不能判別到底是汽車還是電瓶車,算法統一標記為汽車,等物體到了三目可視范圍內,才會識別為正確的物體。夠用,但不酷炫。

而其他廠商,一般采用單目攝像頭的方案,為了能看的遠一點,可視的角度就會變的很小,加上沒有采用前角毫米波,正面的感知范圍就會變得很小,比如下圖,正面的視覺可視范圍就比蔚來小的多。
通過官網的一張圖我來做一下靈魂畫手,紅色標記的范圍是三目攝像頭的可視范圍,黃色標記的范圍是毫米波(可能)探測的范圍。
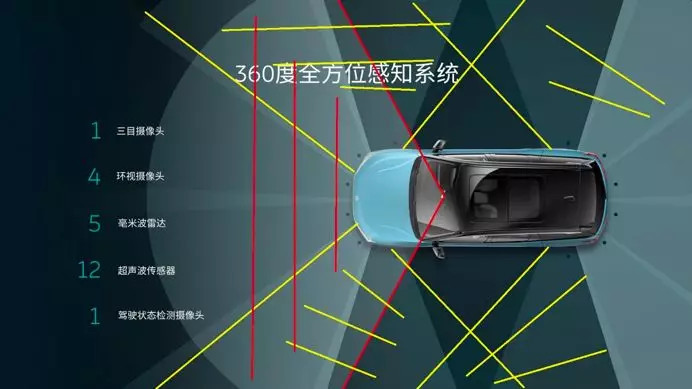
可以看到,在側面近距離是有探測盲區的,值得夸贊的是,蔚來做了兩個毫米波雷達和三目視覺的融合,并且展示在動態儀表盤上,上面我們已經說了,雷達和攝像頭看到的世界是不一樣的,要把他們的信號轉換成圖像再拼接起來很不容易,雖然現在還不完美,但已經超過了我之前的預期(我預期到底是有多低)。
同時,這就解決了上面的第四個疑問:為什么顯示的車會來回晃動,為什么并排的車可能會不顯示?
4、芯片
特斯拉自研的 HW3.0 芯片 AI 算力達到驚人的 144TOPS(萬億次每秒),蔚來采用的 MobileyeQ4 僅僅為 2.5 TOPS,將來的MBQ5 會是 25TOPS。而小鵬 P7 將來會搭載的 NVIDIA Xavier(沒錯,就是專做顯卡幾十年的那家,特斯拉 AP2.0 和 AP2.5 的芯片供應商)也僅僅是 21-30TOPS。
那巨大的算力差距是否代表輔助或者自動駕駛巨大的差距呢?并不完全是這樣。
特斯拉采用 7 個攝像頭幾乎純視覺方案需要的算力遠遠大于其他家,而蔚來只需要處理三個攝像頭和四個雷達的數據需要的運算量大大減少。
5、總結
從硬件上可以看出,特斯拉擁有最強的大腦和多達 7 只眼睛;蔚來擁有較強的大腦和 3 只眼睛、5 只耳朵,其中三只眼睛負責前向的視覺,五只耳朵負責視覺盲區的感知;而其他家一般要么就是大腦較強,但是只有一只眼睛和一只耳朵,要么只擁有很普通的大腦。
這里要重點說說某鵬,其實它的耳朵(有 2 個后角毫米波雷達)數量并不少,但是從公開只言片語看,Mobileye 和 NVIDIA 并沒有提供市面上頂級的芯片給到 G3,算力不足大大限制了發揮,而在下一代P7上NVIDIA提供了Xavier芯片會拉回不少劣勢,但是Xavier是否能滿足數十個攝像頭、多個高精度雷達信息的處理,以及路徑規劃、決策、控制這么多需求的算力,從而實現現在并不知道是否存在的L3級輔助駕駛,仍然存在疑問。
軟件
從表象來看,蔚來軟件和特斯拉的差距并不大(UI、ADAS 功能),但是背后的差距有一條護城河那么寬,而傳統廠商通過博世方案提供的ADAS,和蔚來又有巨大的鴻溝。
上面我們說了,輔助駕駛分為感知、決策、執行三個過程,蔚來在感知層面是用的 MobileyeQ4 提供的現成數據,同時針對性的進行了一定的優化。
簡單的說就是你的攝像頭輸入圖像,MBQ4 芯片會直接告訴了你這是汽車、這是電瓶車、這是卡車,蔚來并再次做了視覺識別的很多工作,這是一個極其重要的基礎。
特斯拉構建了一整套視覺及神經網絡,通過訓練神經網絡模型來識別更多的物體、做出更正確的決策,這也是特斯拉最大的核心競爭力。
一個好消息是將來的 MobileyeQ5 芯片(聽說蔚來也會首裝),會開放讓車企自己來寫感知算法,而擁有堅實基礎的蔚來,會比其他廠商走的更快更遠。
回到上面的疑問,為什么裝了箱子的電瓶車會被識別為卡車?也許因為歐美沒有我們這樣“美團”電動車,而箱子的特征和廂式卡車又是差不多的,所以直接識別為了卡車。
根據之前公開的信息,蔚來自己負責決策部分的開發。但是蔚來并沒有特斯拉那樣“收集用戶數據”和“影子模式”來不斷優化決策,而是更多的通過道路測試、計算機模擬來積累里程——不夠高效,但同樣能達到目的。
所以碰到近距離加塞的,交通流顯示出來加塞,但是車沒采取措施。蔚來在決策的開發上,還有進步的空間。

驚喜和遺憾
驚喜1、上文說到,最大的驚喜還是蔚來做了不同傳感器數據的融合,雖然并不完美,但是仍舊可以不斷的優化,自研的優勢就在這里。
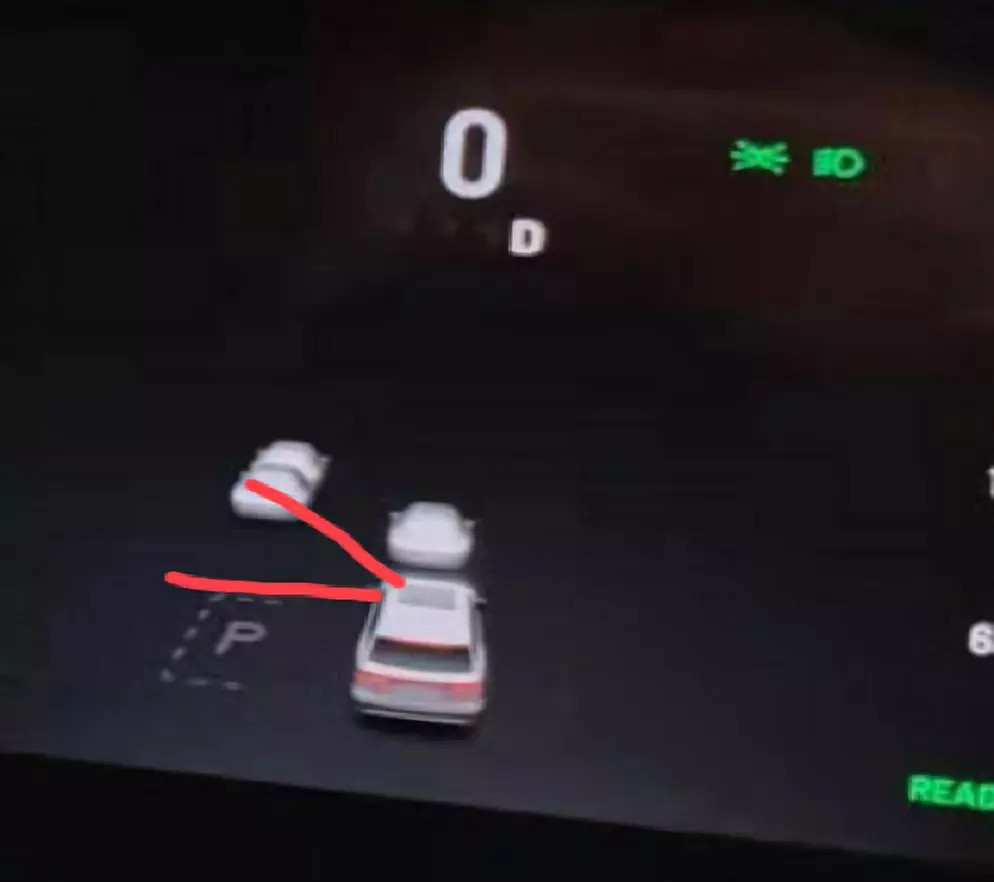
驚喜2:蔚來能識別正前方垂直開過的車輛側面,這點無論在 AP上還是小鵬XP 上我都沒有發現。

遺憾1:2.3 版本的 NP 仍舊不能顯示行人信息,這點其他廠商早就已經能顯示,而 MobileyeQ4 是可以直接識別行人的,蔚來也許還在做二次的識別和優化。
最后的最后,蔚來到底需要多久才能趕上特斯拉?分兩個部分來分析。
1、感知能力和范圍:
比如某家車企在沒有后向感知能力的情況下推出了 ALC(轉向燈變道)功能,這是極端不負責任的,在使用 ALC 時候很大概率會發 生本車全責的追尾事故。而 AP 和 NP 的前向視覺感知能力,也要遠超采用單目攝像頭的其他輔助駕駛。
2、目標不同:
AP 這套硬件設計之初是朝著 L4 甚至 L5 級的自動駕駛去的(中間經歷過兩次更換芯片,2016 年就該實現的目標到目前還未實現),而蔚來一代平臺的目標是高級別的 L2 無限接近 L3,這很快就能實現。
3、實現方式不同:
AP 采用比較激進的、一條誰也沒走過也不知道能不能走得通的路——純視覺感知,而 NP 采用了比較成熟而又比其他家更先進、更全面的方案——融合感知。
從實際使用上,目前 AP 和 NP 基本處于同一水平,AP 中 FSD(完全自動駕駛)目前在國內可用的召喚(直進直出類似比亞迪遙控),和 NOA(根據導航自動駕駛)處于比較初級的階段——前一陣還忘了給中國區推送。
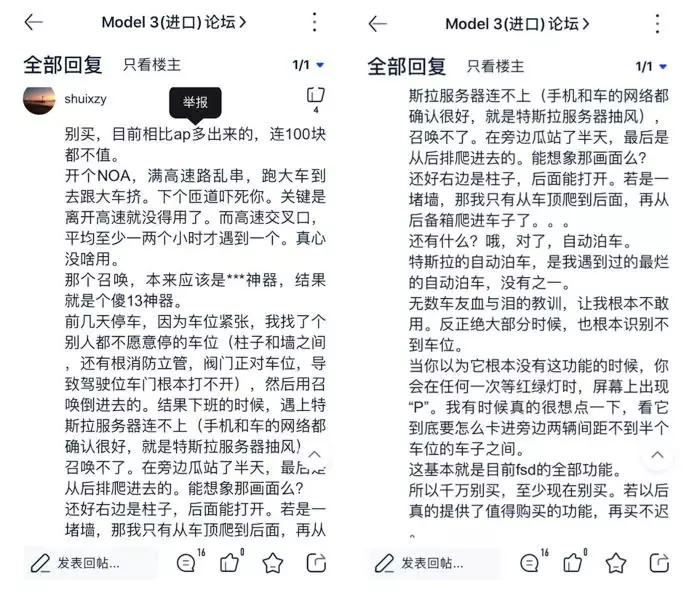
而蔚來不遠的將來可能就能推出更符合中國路況的 NOA 功能。從性價比角度,3.9萬 的NP完整功能值回票價(還不到車價的 10%),而 5.6萬(幾乎是車價的 20%)的 FSD 目前在國內還不值這個價格(見下圖吐槽),如果一臺智能電動車,你不選購——尤其非通用方案、有廠商特色的輔助駕駛系統——這臺車的魅力就會少了一大半。
NP已經遠超過AP1,達到目前AP版本80%的功力…我相信,蔚來會通過自研,牢牢掌握住輔助(自動)駕駛技術上的核心競爭力,而本土化的優勢,使得 NP 將來會成為最適合中國路況的輔助(自動)駕駛系統。
(完)
來源:第一電動網
作者:電動星球News蟹老板
本文地址:http://m.155ck.com/kol/101893
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!








 京公網安備
11010502033163號
京公網安備
11010502033163號