
「誰用激光雷達(dá),誰完蛋!」
在去年特斯拉舉辦的 Autonomy Day 上,特斯拉 CEO Elon Musk 言辭激烈地炮轟激光雷達(dá)。
「昂貴的傳感器是不必要的,這就像是一大堆昂貴的附屬品。」
「像闌尾一樣。一個(gè)闌尾不好——那么,一大堆闌尾怎么樣?這太荒謬了。」
Musk 對激光雷達(dá)的態(tài)度是盡人皆知,他甚至認(rèn)為:自動駕駛汽車依賴激光雷達(dá),就像行走依賴拐杖一樣。
雖然特斯拉在自動駕駛有過多次跳票的記錄,但特斯拉在人工智能與神經(jīng)網(wǎng)絡(luò)上的飛速進(jìn)步也給足了 Musk 不斷立下 Flag 的底氣。
當(dāng)然,這也離不開 Autopilot 團(tuán)隊(duì)的努力。
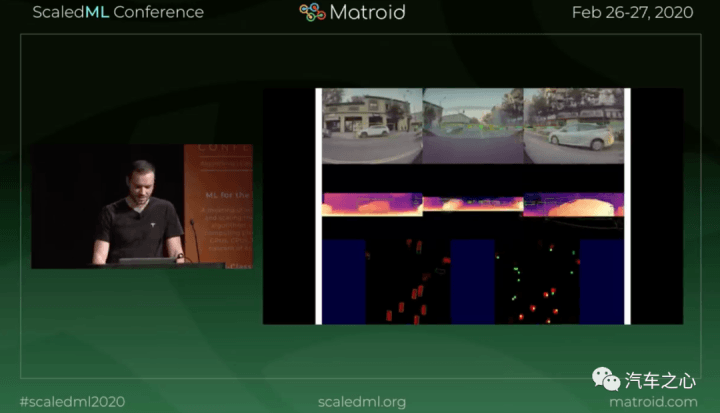
在今年 2 月的 Scaled ML 大會上,特斯拉 AI 高級總監(jiān) Andrej Karpathy 對外分享了特斯拉訓(xùn)練 AI 的方法,同時(shí)也首次對外分享了特斯拉如何借助攝像頭就能實(shí)現(xiàn)激光雷達(dá)的探測精度。

傳統(tǒng)自動駕駛系統(tǒng)非常依賴激光雷達(dá)這一不可或缺的傳感器。
激光雷達(dá)的工作流程可以簡單理解為三個(gè)步驟:
首先,激光雷達(dá)陣列會投射出激光點(diǎn)陣;
而后,車載計(jì)算機(jī)將這些激光點(diǎn)陣的回波「翻譯」成 3D 圖像,讓車輛識別周邊是否有汽車車輛、行人、道路或建筑;
最后,自動駕駛汽車感知到周圍環(huán)境后,安全穿梭在復(fù)雜的路況下。
近些年來,自動駕駛的蓬勃發(fā)展也促進(jìn)了激光雷達(dá)硬件及相關(guān)軟件方案行業(yè)的大躍進(jìn)。但即使是這樣,激光雷達(dá)系統(tǒng)的價(jià)格依然居高不下。
與其相比,在智能手機(jī)、筆記本等行業(yè)已相當(dāng)普及的攝像頭卻只要數(shù)十美元。
與激光雷達(dá)依靠激光飛行時(shí)間來判斷各個(gè)像素間距離的方法不同,人類測距靠的是大腦。
除了雙眼創(chuàng)造的立體視覺(只適合中等距離),我們還能借助「動態(tài)視差」跟蹤物體的運(yùn)動方式,從而得出其他可以參考的線索。而且,即使駕駛員閉上一只眼睛,也一樣能夠好好駕駛。
那么,借助神經(jīng)網(wǎng)絡(luò),自動駕駛汽車是不是也能實(shí)現(xiàn)同樣的效果呢?

這時(shí)就輪到「虛擬激光雷達(dá)」登場了。
目前,特斯拉 AI 團(tuán)隊(duì)已經(jīng)掌握了名為「虛擬激光雷達(dá)」(pseudo-LiDAR)的新技術(shù),它彌合了傳統(tǒng)計(jì)算機(jī)視覺和激光雷達(dá)強(qiáng)大的點(diǎn)云世界之間的界線。
這是什么意思?
首先,特斯拉將計(jì)算機(jī)視覺提升到了前所未有的水平——不僅能夠分析圖像,而且還能夠分析圖像中的單個(gè)像素。
這也意味著,隨著時(shí)間推移,特斯拉的這一技術(shù)或許能夠復(fù)制傳統(tǒng)激光雷達(dá)的大部分功能,進(jìn)一步提高特斯拉在 3D 物體探測方面的技術(shù)水平。
與訓(xùn)練多個(gè)神經(jīng)網(wǎng)絡(luò)相比,訓(xùn)練虛擬激光雷達(dá)的過程并不復(fù)雜。在這里,工程師們會使用到無監(jiān)督學(xué)習(xí)技術(shù)。
其次,與傳統(tǒng)激光雷達(dá)系統(tǒng)相比,特斯拉基于攝像頭探測方式的成本更加便宜,硬件端實(shí)現(xiàn)起來也更容易,探測距離更是能大幅提升。
不過,想實(shí)現(xiàn)相同的性能,特斯拉必須手握一套極其復(fù)雜的計(jì)算系統(tǒng),將輸入的原始數(shù)據(jù)轉(zhuǎn)化成真實(shí)高效的信息。
比如,車載計(jì)算機(jī)能從連續(xù)的靜態(tài)圖像中識別出道路標(biāo)線、交通標(biāo)志和其他車輛。
「我們走了一條『虛擬激光雷達(dá)』的路徑,只需簡單預(yù)測單個(gè)像素的深度,找到它們直接的距離,就能得出結(jié)論。」Karpathy 說道。
這樣說來,特斯拉只要不斷重復(fù)這一過程,就能復(fù)制傳統(tǒng)激光雷達(dá)系統(tǒng)的大部分功能。
但與此同時(shí),這個(gè)過程在解構(gòu)圖像時(shí),也需要付出巨大的實(shí)時(shí)算力。好在,特斯拉注重垂直整合,F(xiàn)SD 芯片就是專為自家代碼開發(fā)的。
目前,特斯拉的「虛擬激光雷達(dá)」解決方案正在變得越來越完善。
在 Scaled ML 大會上,Karpathy 放出了一系列有激光雷達(dá)形式的 3D 地圖,這些地圖看起來就像是激光雷達(dá)采集到的信息。
「只要利用好了視覺技術(shù)和『虛擬激光雷達(dá)』,(自動駕駛車輛在)未使用激光雷達(dá)和使用激光雷達(dá)之間的差距會快速縮小。」Karpathy 解釋。
當(dāng)然,「虛擬激光雷達(dá)」這項(xiàng)技術(shù)并非特斯拉獨(dú)有的專利。
最早提出「虛擬激光雷達(dá)」概念的,要追溯到一篇來自康奈爾大學(xué)的技術(shù)論文。
這篇論文提出了一種新方法來縮短純視覺技術(shù)架構(gòu)與激光雷達(dá)間的性能差距:
通過改變立體攝像頭目標(biāo)檢測系統(tǒng)的 3D 信息呈現(xiàn)形式,將基于圖像的立體視覺數(shù)據(jù)轉(zhuǎn)換為類似激光雷達(dá)生成的 3D 點(diǎn)云,通過數(shù)據(jù)轉(zhuǎn)換切換成最終的視圖格式。
具體的過程是這樣的:

首先,將基于圖像的立體視覺數(shù)據(jù)轉(zhuǎn)換為類似激光雷達(dá)生成的 3D 點(diǎn)云;
其次,在數(shù)據(jù)輸入通常用于解讀激光雷達(dá)數(shù)據(jù)的 3D 物體探測算法之前,先將數(shù)據(jù)轉(zhuǎn)換為「鳥瞰」視圖格式。

康奈爾大學(xué)的研究人員在實(shí)驗(yàn)中采用了 40 萬像素相機(jī),雖然實(shí)驗(yàn)結(jié)果仍然無法比肩激光雷達(dá) 66% 的 3D 平均精度,但是通過采用這種方案,基于圖像數(shù)據(jù)的 3D 平均精度大幅提高到了 37.9%。
研究人員表示,更高分辨率的相機(jī)可能會進(jìn)一步提高實(shí)驗(yàn)結(jié)果。
康奈爾大學(xué)的這項(xiàng)研究證明,利用成本低廉的立體視覺攝像頭,或能提供與激光雷達(dá)幾乎相同的精度。
要知道,激光雷達(dá)是目前自動駕駛技術(shù)開發(fā)中最常見的方案,也是最昂貴的技術(shù)方案。
這項(xiàng)研究,也在一定程度上為 Musk 在激光雷達(dá)上的觀點(diǎn)提供了一定技術(shù)支持。
那么,該如何評價(jià)這項(xiàng)技術(shù)呢?
如果有一天,「虛擬激光雷達(dá)」這項(xiàng)技術(shù)能完成對激光雷達(dá)的追趕,那些還在使用激光雷達(dá)的汽車廠商或是自動駕駛公司,會在第一時(shí)間投向「虛擬激光雷達(dá)」的懷抱嗎?
雖然整個(gè)自動駕駛行業(yè)已經(jīng)基本認(rèn)可自動駕駛車輛需要部署包括激光雷達(dá)、毫米波雷達(dá)、攝像頭在內(nèi)的多種傳感器系統(tǒng)。
但從現(xiàn)在的情況來看,大多數(shù)公司還是想靠激光雷達(dá)一勞永逸的解決問題,畢竟這條路徑肯定行得通,而且激光雷達(dá)在未來還有相當(dāng)大的降價(jià)空間。
而康奈爾大學(xué)的這項(xiàng)研究表明,立體攝像頭系統(tǒng)至少可以為基于激光雷達(dá)的探測方案提供低成本的備份冗余。
如果特斯拉能率先將「虛擬激光雷達(dá)」應(yīng)用在車上,那么自動駕駛汽車基于攝像頭的 3D 物體探測或許在不久的將來或能成為現(xiàn)實(shí)。而這種前景的影響,將是巨大的。
參考信息:
https://cleantechnica.com/2020/04/24/tesla-achieved-the-accuracy-of-lidar-with-its-advanced-computer-vision-tech/
https://www.forbes.com/sites/bradtempleton/2020/04/14/if-teslas-dream-of-making-cameras-perform-as-well-as-lidar-comes-true-it-may-help-teslas-competitors-more/
來源:第一電動網(wǎng)
作者:汽車之心
本文地址:http://m.155ck.com/kol/118183
本文由第一電動網(wǎng)大牛說作者撰寫,他們?yōu)楸疚牡恼鎸?shí)性和中立性負(fù)責(zé),觀點(diǎn)僅代表個(gè)人,不代表第一電動網(wǎng)。本文版權(quán)歸原創(chuàng)作者和第一電動網(wǎng)(m.155ck.com)所有,如需轉(zhuǎn)載需得到雙方授權(quán),同時(shí)務(wù)必注明來源和作者。
歡迎加入第一電動網(wǎng)大牛說作者,注冊會員登錄后即可在線投稿,請?jiān)跁T資料留下QQ、手機(jī)、郵箱等聯(lián)系方式,便于我們在第一時(shí)間與您溝通稿件,如有問題請發(fā)送郵件至 content@d1ev.com。
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價(jià)再買車,買的放心開的安心
您的詢價(jià)信息
已經(jīng)成功提交我們稍后會聯(lián)系您進(jìn)行報(bào)價(jià)!

大牛說專欄作者")









 京公網(wǎng)安備
11010502033163號
京公網(wǎng)安備
11010502033163號