前幾日日產汽車的下一大帶有激光雷達的Pro-Pilot演示車輛在比較大范圍內宣傳,很有意思的事,和其他兩家日企不一樣,日產目前是圍繞自己的AD/ADAS先進技術研發部在開發,是在原有的Pro-Pilot 2.0上通過加入Luminar Lidar傳感器的方式迭代,結合日產的情況,我順帶著梳理三家日企不同的思路。
● 日產
日產還在雷諾、日產和三菱的聯盟里面承擔很重要的開發角色,在高通的自動駕駛芯片發布會上,RNM聯盟之前和Waymo合作,也沒推下去特別快,現在隨著雷諾開始賣日產的大部分股權,從分工來看,日產和雷諾在EE架構上,由雷諾牽頭,在自動駕駛上開發HPC的硬件和軟件,由日產牽頭。
● 豐田
豐田現在的親兒子是Woven Planet Group,順帶著投資Aurora和Pony做個備份,而豐田的自研團隊總體專注于L2+的開發,其實豐田現在座艙都需要挺長一段時間搞明白,這塊投入巨資的汽車靈魂事業可能還是靠美國研究團隊多一些。
●本田
本田的Legend開發,更像是日系自動駕駛團隊最后的掙扎,不管是在成本控制,控制系統的迭代開發方面,都很難跟上;所以本田在投資上和GM還是全力投資Cruise,也是靠兩家的資本力量去扶持一個獨立的自動駕駛開發公司。
總體而言,在這里看RNM想要在自動輔助駕駛技術方面跟上前面幾家,主要看持續投入的力度,目前雷諾(在俄一把損失資產和銷量)和日產從財務角度失血比較嚴重。
備注:對于一枚身處上海的被動宅來說,這兩個月就一直在家,不過希望各位讀者連我的那份都這個5天的勞動節去蹦噠,各位讀者節日快樂!節日都有選擇不宅家的權力,能好好出去玩一下!
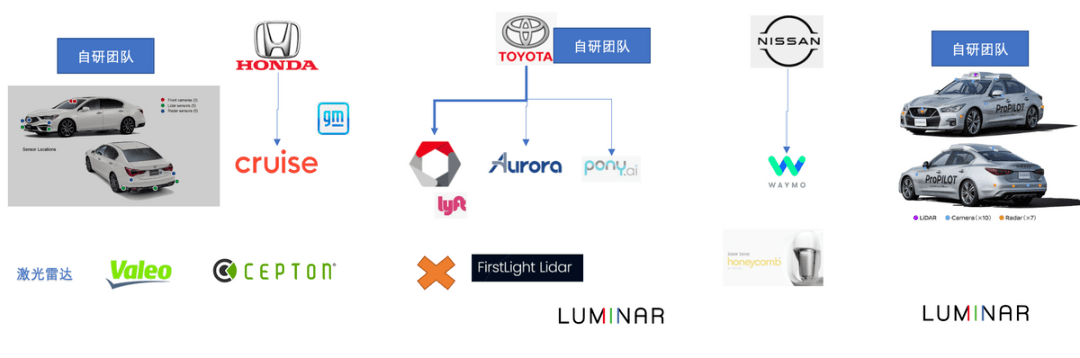
▲圖1. 三家日企自動輔助駕駛開發的布局
Part 1 日產的自動輔助系統開發
日產之前的Pro Pilot都是基于外部的視覺算法,整個工作主要集成工作為主,而這次和展示的要把激光雷達整合到新一代ProPilot的感知配置如下:
(1)10個攝像頭
這個安裝方案類似于通常L4加裝感知套件的做法,目前有點像出租車加裝頂牌一樣。在ProPilot 2.0的8 顆攝像頭(3顆前視+ 4 AVM + 1 DMS)
1個前置攝像頭用于前方大范圍FOV的視野探測
2個前方視野攝像頭布置于車頂左右兩側(改變位置)
2個后視攝像頭布置于翼子板左右兩側(新增)
1個后視布置在車頂天線處(新增)
在這里使用六個攝像頭組成覆蓋整車的360度視野,比原來增加了3個。
并且配置四個環視的魚眼攝像頭(數量不變),前后+左右后視鏡(隨著CMS導入,可能會進行集成)
(2)7個毫米波雷達(比原來增加2個)
從布置來看,1個長距離雷達和4個短距雷達布置在車輛4個角落,增加后方的2個長距雷達,后面這兩個有啥用實在沒看出來,可能是變道時候需要后方車輛的車速信息吧
(3)1個激光雷達(新增)
激光雷達采用luminar的激光雷達,布置于前方車頂
另外還有:
1個高精地圖模塊
超聲波傳感器(9個):這個沒有明顯提升功能性的作用
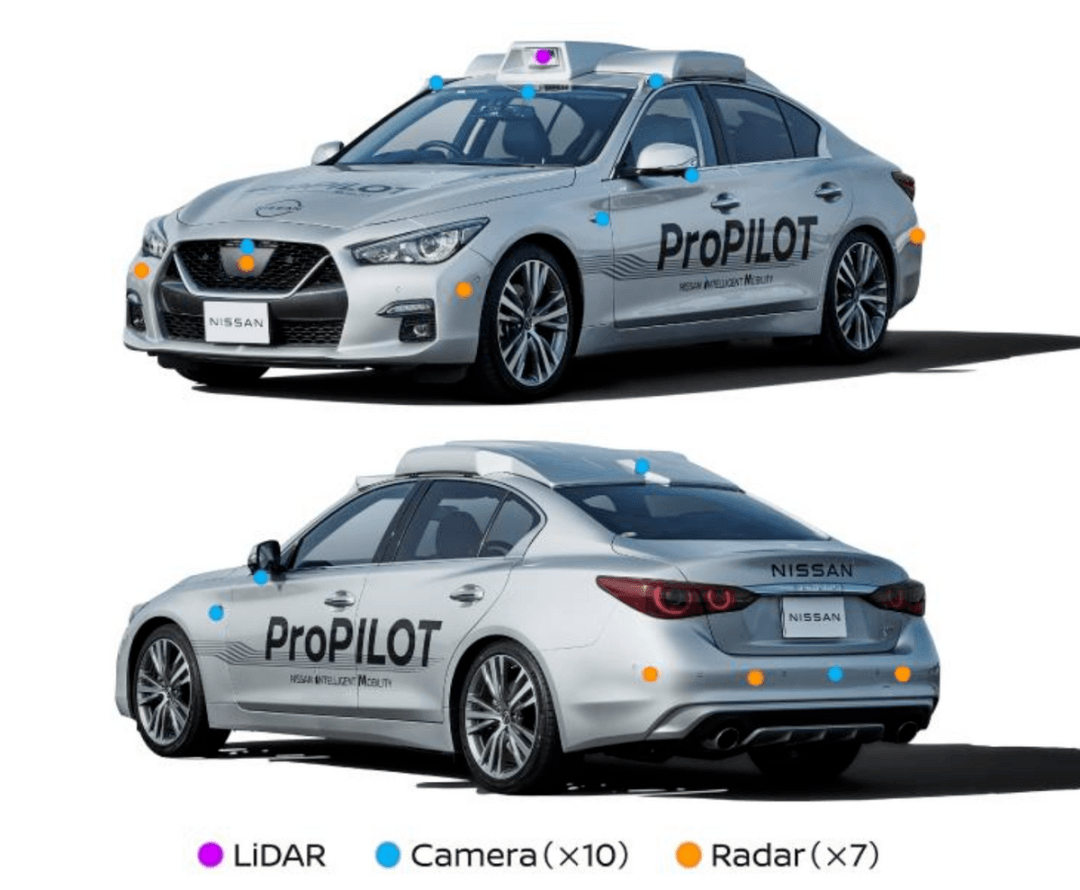
▲圖2. 日產的感知配置
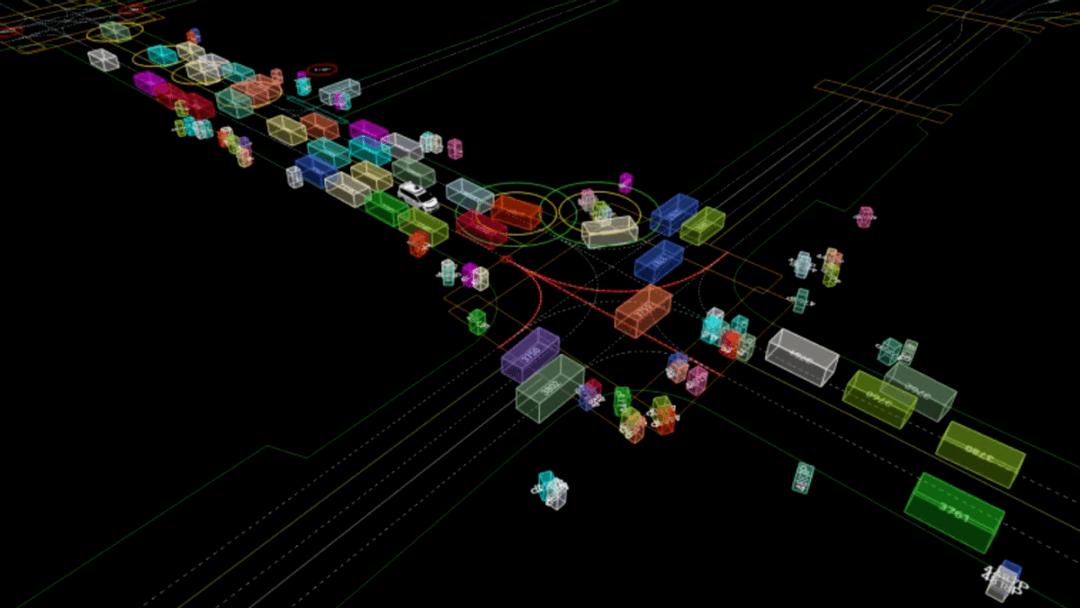
下面這個圖可能看得更清楚,日產堆了一圈環視攝像頭,在融合算法里面通過雷達、攝像頭和激光雷達來做融合,并且稱之為“地面實況感知”。目前日產還沒有說整個處理器如何實現處理,這方面將來是否能導入高通Snapdragon Ride還是有可能的。
備注:高通和雷諾先宣布,由于硬件平臺的一致性,這方面日產可能先選了
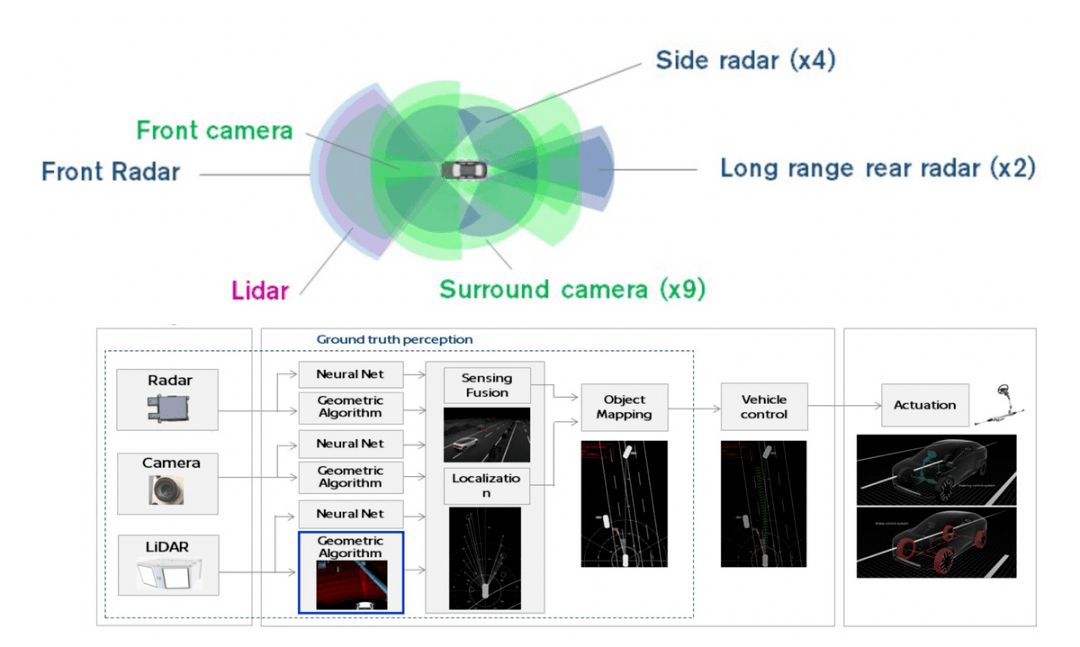
▲圖3. 日產的算法自研情況
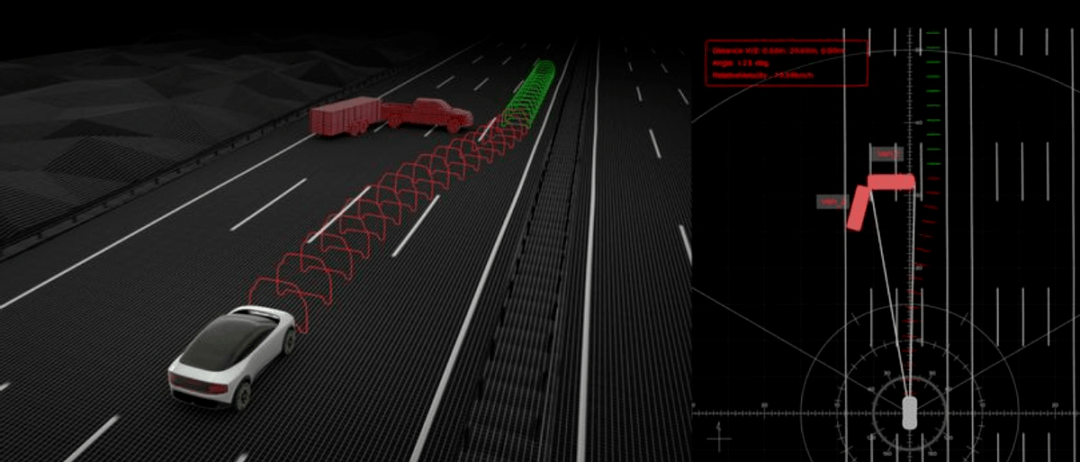
▲圖4. 融合的效果展示
在RNM的聯盟里面,有約束性的是統一的EE電子電氣架構,而在2026年RNM聯盟里面下一代車型都會使用通用型的電子電氣架構,如果按照這樣的設計,整個RNM的車輛造型設計都會出現巨大的挑戰,我其實沒理解上述怎么解決。
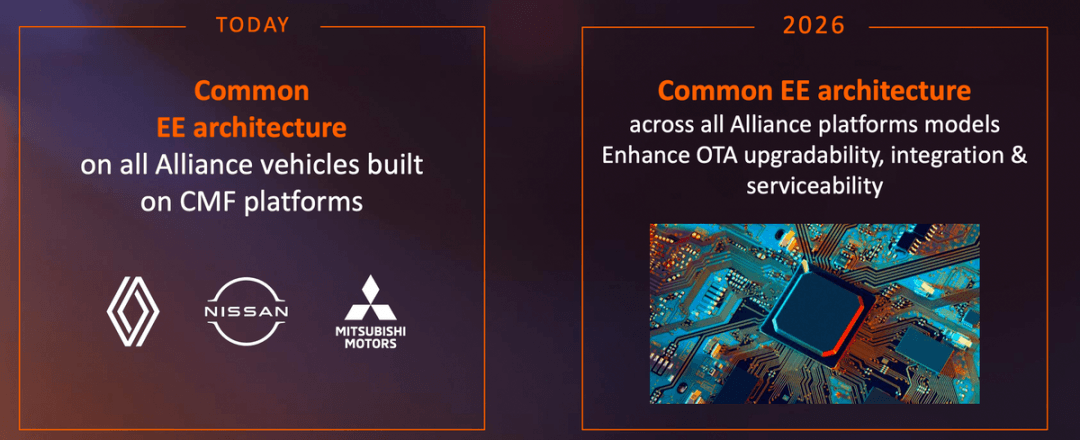
▲圖5. RNM統一的電子電氣架構
也就是說在2026年,都會去兼容集中式電氣電氣架構。
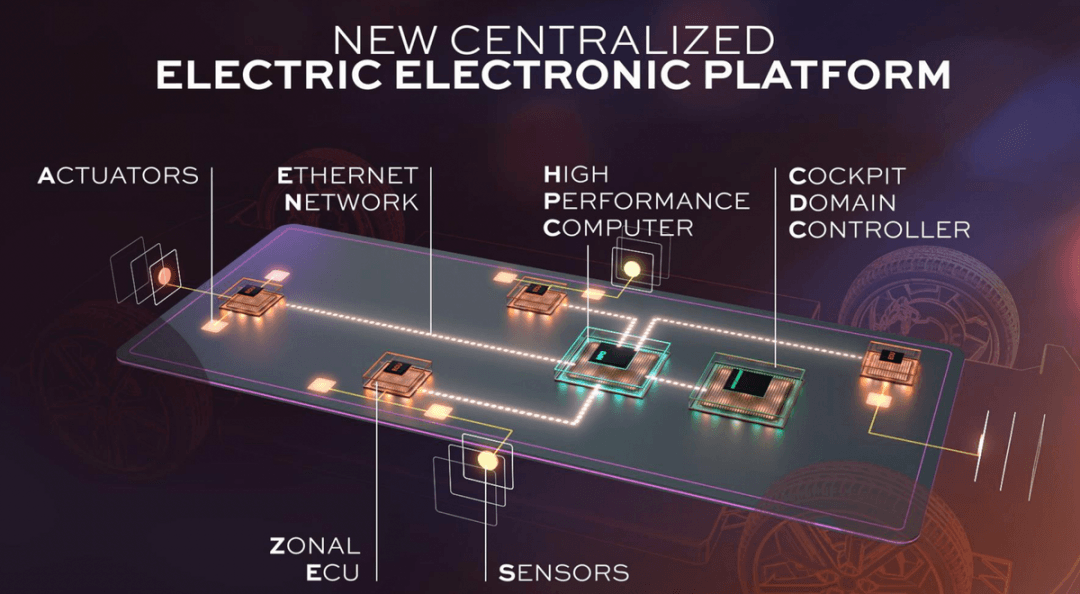
▲圖6. 集中式的電子電氣架構HPC +Zonal+Sensor架構
這是兩邊在聯合開發過程中的成本節約。
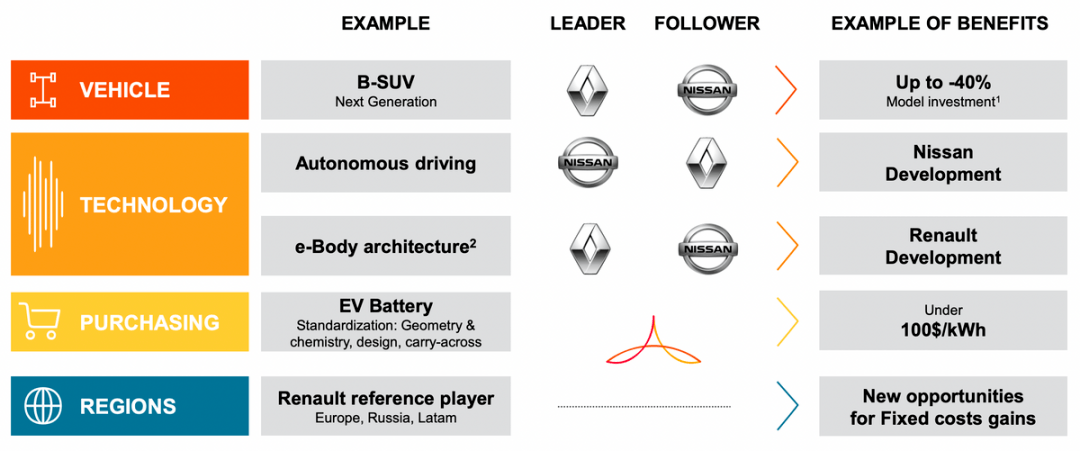
▲圖7. 日產在這里主要扮演的角色是日產開發
Part 2 日企在自動駕駛的美國戰略
(1)豐田
隨著豐田5.5億美元收購Lyft的自動駕駛部門,Woven Planet的開發路徑也在嘗試轉變。對豐田來說,目前市面上很多車輛如果能收集多樣化的駕駛數據,對北美團隊開發自動駕駛汽車系統有很大的現實意義。在基于Woven原有的激光雷達中收集數據,通過Lyft在運營車輛上數據埋點(安裝攝像頭中收集數據),能幫助改進用于為自動駕駛車輛導航的高清地圖,攝像頭數據包括十字路口、騎車者、步行者,和Lyft司機外出錄像。通過這些Woven利用3D計算機視覺和機器學習的結合,從攝像頭的畫面中自動識別交通對象。
▲圖8. Woven買下來Lyft自動駕駛部門也繼續保持合作
(2)本田
Legend這個事情,宣傳的意義更大一些,隨著本田開始大局投資,特別是加強和通用的研發合作,兩家其實已經進入實質性先進科技聯盟的狀態。
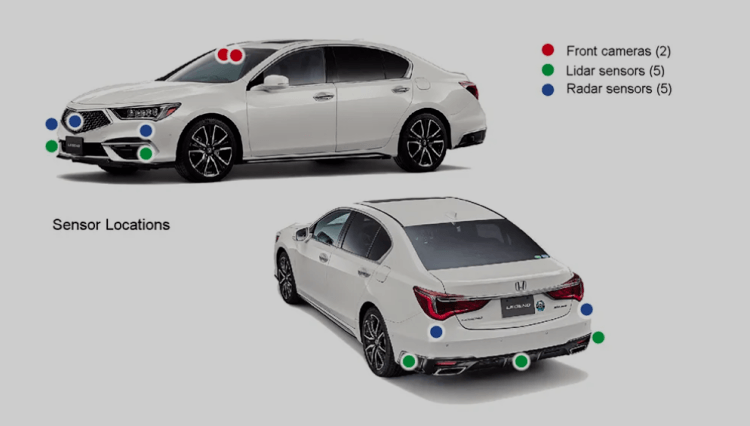
▲圖9. 全球首個L3的量產車輛給100臺的本田Legend所拿到
小結:我的理解,某種意義上日本和美國達成了在智能汽車方面的新一代技術依賴,日本汽車產業可能除了日產以外都很依賴于美國這邊的技術開發。等再過幾年,蘋果系列汽車軟件套件出來,可能真有可能快速改變盤面。
來源:第一電動網
作者:朱玉龍
本文地址:http://m.155ck.com/kol/174128
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!








 京公網安備
11010502033163號
京公網安備
11010502033163號