整理 | 馬一龍
編輯 | 德新

到 2022 年 6 月份,蔚來(lái)的用戶使用 NIO Pilot 輔助駕駛行駛的累計(jì)里程已經(jīng)達(dá)到了 4 億 4000 多萬(wàn)公里,在其中使用領(lǐng)航輔助 NOP 的用戶累計(jì)里程已經(jīng)達(dá)到了 1 億 6700 多萬(wàn)公里,這些數(shù)據(jù)的背后是蔚來(lái)輔助駕駛逐漸走向成熟。
蔚來(lái)自動(dòng)駕駛技術(shù)的終極目標(biāo)是能夠提供給用戶一個(gè)完全放松的點(diǎn)到點(diǎn)的自動(dòng)駕駛體驗(yàn)—— NAD。
為實(shí)現(xiàn) NAD,蔚來(lái)為這套系統(tǒng)配備了一套超強(qiáng)的傳感器系統(tǒng):Aquila 蔚來(lái)超感系統(tǒng)。

ET7 上共配備了 33 個(gè)高性能感知硬件,其中包括 1 個(gè)超遠(yuǎn)距高精度激光雷達(dá),7 個(gè) 800 萬(wàn)像素高清攝像頭、4 個(gè) 300 萬(wàn)像素高感光環(huán)視專用攝像頭、1 個(gè)增強(qiáng)主駕感知、5 個(gè)毫米波雷達(dá)、12 個(gè)超聲波傳感器、2 個(gè)高精度定位單元和 V2X 車路協(xié)同感知單元,實(shí)現(xiàn)融合感知。
最核心的傳感器就是激光雷達(dá),來(lái)自 Innovusion 的 Falcon 半固態(tài)激光雷達(dá):采用 1550nm 激光器,是已量產(chǎn)的探測(cè)距離最遠(yuǎn)的激光雷達(dá),也世界上第一款已規(guī)模量產(chǎn)的 1550nm 激光雷達(dá)。
2022 年 7 月 5 日,Innovusion 實(shí)現(xiàn)了車規(guī)激光雷達(dá) Falcon 第 10000 臺(tái)的下線,預(yù)估裝車量在 5000 臺(tái)以上。
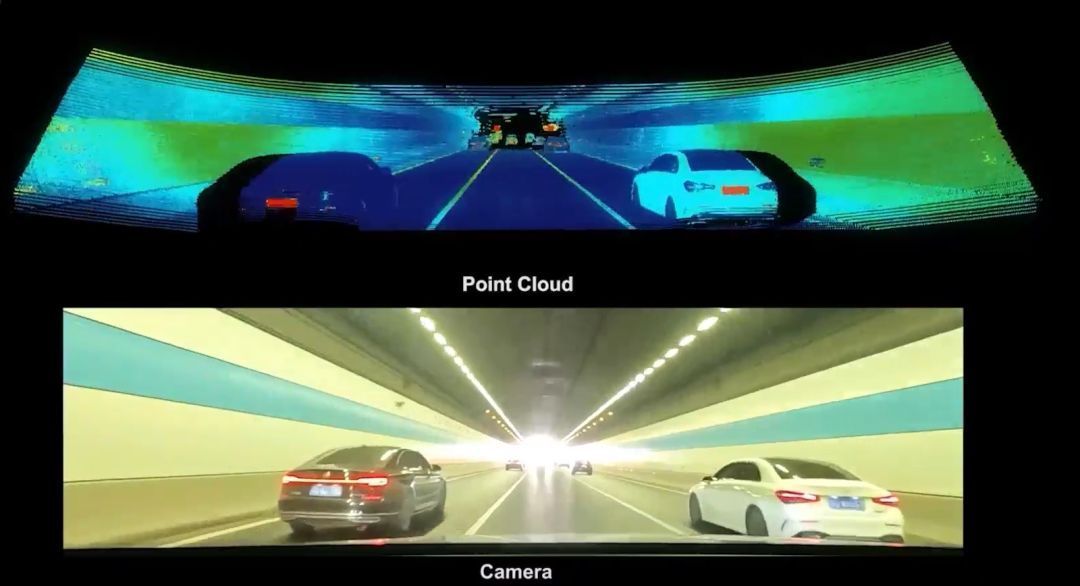
與傳統(tǒng)攝像頭為主傳感器的系統(tǒng)相比,激光雷達(dá)在一些特殊場(chǎng)景感知上有優(yōu)勢(shì)。
比如在隧道逆光場(chǎng)景下,激光雷達(dá)感知不懼高亮,不懼逆光,感知的動(dòng)態(tài)范圍很寬,點(diǎn)云效果很好。
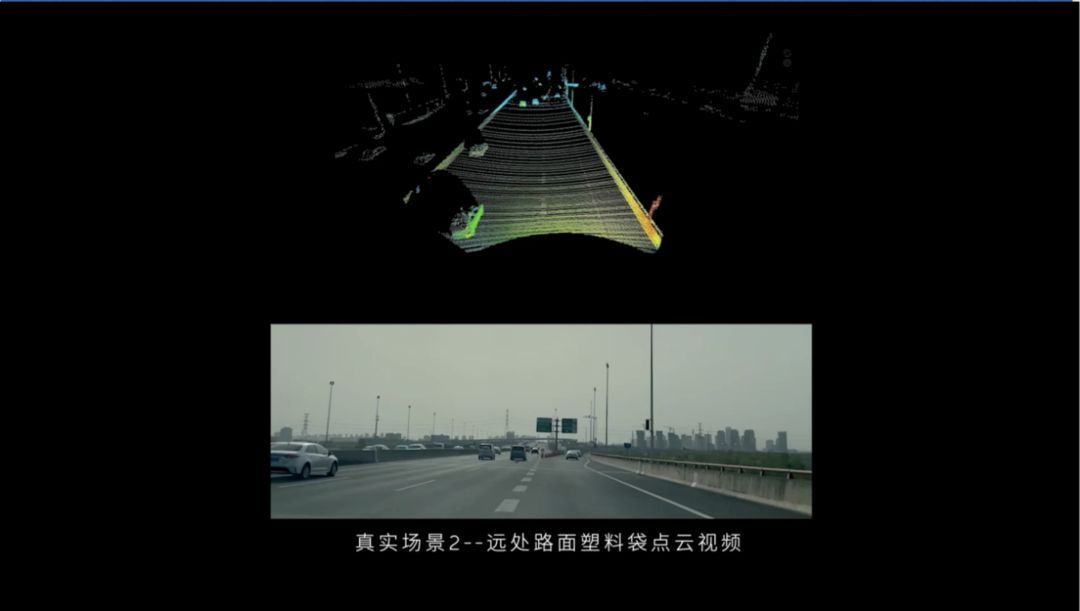
又比如對(duì)道路遺落物(如透明塑料袋)的檢測(cè),攝像頭的感知效果不如激光雷達(dá)。
激光雷達(dá)具備 3D 檢測(cè)能力,有深度信息,而攝像頭感知是平面的,所以攝像頭看不到透明塑料袋,而激光雷達(dá)可以。
在應(yīng)對(duì)傳感器被臟污的挑戰(zhàn)時(shí),攝像頭受影響的程度更大,激光雷達(dá)則更小。
但這不意味著激光雷達(dá)不怕任何臟污。為了應(yīng)對(duì)極端情況,蔚來(lái)也有自己的算法,用來(lái)判斷臟污是否會(huì)影響激光雷達(dá)的感知效果,如果會(huì),系統(tǒng)將告知用戶使用激光雷達(dá)清潔套裝對(duì)其進(jìn)行清潔。

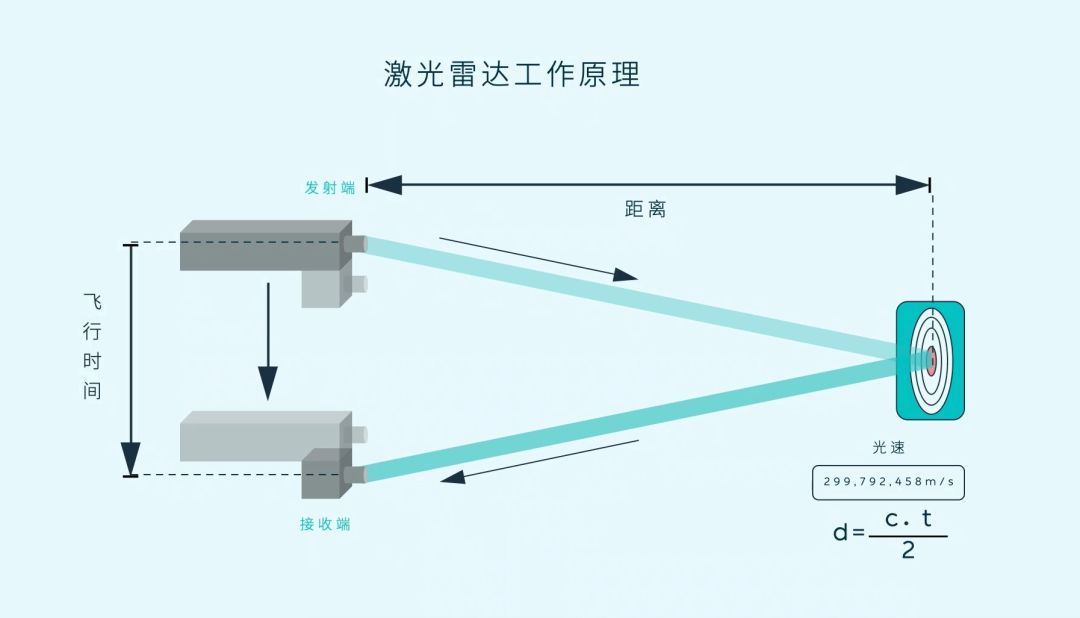
激光雷達(dá)基本上分為三部分:發(fā)射部分、接收部分、信號(hào)處理及點(diǎn)云生成部分。
激光雷達(dá)的發(fā)射端會(huì)持續(xù)的等間隔的發(fā)射激光束,這些激光束會(huì)去掃描正前方所需要的整個(gè)視野的區(qū)域,等間距的掃描,每一個(gè)點(diǎn)都會(huì)掃到。
這些光束發(fā)射到空間以后,如果在視野中的某一個(gè)點(diǎn)遇到了障礙物,光束就會(huì)被障礙物反射,反射到接收端,接收端收到反射回來(lái)的激光,它根據(jù)這束激光的發(fā)射時(shí)間和接收時(shí)間的時(shí)間差再乘以光速,就可以推斷出來(lái)這個(gè)物體離得有多遠(yuǎn),由于激光的工作波長(zhǎng)非常穩(wěn)定,所以測(cè)距精度是很高的。
蔚來(lái)堅(jiān)定的走多傳感器融合路線,也就是要堅(jiān)定推動(dòng)激光雷達(dá)上車。
蔚來(lái)智能硬件副總裁白劍表示:靠著攝像頭來(lái)做自動(dòng)駕駛,將攝像頭和人眼相提并論,其實(shí)是存在誤區(qū)的。
人眼和攝像頭比:
人眼有很多神奇的功能,第一個(gè)就是人的眼睛和大腦可以瞬間獲得深度信息,也就是 3D 信息。比如公共汽車上的人像廣告,人的眼睛看前方,很清晰的就可以知道前方是一幅畫還是一個(gè)真人;攝像頭會(huì)識(shí)別成人,造成車輛誤剎車,即使現(xiàn)在一些雙目甚至三目的攝像頭技術(shù)能夠提供部分深度信息,但是距離越遠(yuǎn)就越不精確,而且在近距離情況下也做不到人眼這么好。
人眼的焦距是隨時(shí)可變的,它的聚焦功能是非常強(qiáng)大的,需要的時(shí)候可以看全景,也可以瞬間聚焦到感興趣的地方,而攝像頭則要遜色很多。
只靠著攝像頭傳感器和視覺(jué)技術(shù)去做輔助駕駛或者自動(dòng)駕駛,有點(diǎn)像小學(xué)六年級(jí)的學(xué)生和一個(gè)大學(xué)生同場(chǎng)競(jìng)技一樣不公平。
激光雷達(dá)可提供深度信息,攝像頭可提供非常豐富的二維信息,這兩個(gè)結(jié)合就可以實(shí)現(xiàn)媲美人眼的效果,實(shí)現(xiàn)跟人眼相當(dāng)?shù)哪芰λ健?/span>
基于此,蔚來(lái)堅(jiān)定地走多傳感器融合路線。
ET7 上的這顆激光雷達(dá)擁有目前業(yè)界最遠(yuǎn)的探測(cè)距離:500 米(不加任何定語(yǔ)情況下)。
激光器用的是 1550nm 型號(hào),支持大功率的發(fā)射,才讓其探測(cè)距離能達(dá)到這么高的水平。
水平視角 120 度,看得廣,基本上現(xiàn)在上車的主激光雷達(dá)都是這個(gè)水平(比如理想 L9 上搭載的禾賽 AT128 型激光雷達(dá))。
這顆激光雷達(dá)的定睛凝視 ROI 達(dá)到了 0.06 度乘以 0.06 度的分辨率,據(jù)稱是目前業(yè)界最好的。
綜合以上的技術(shù)參數(shù),激光雷達(dá)需要看得遠(yuǎn)、看得清以及看得穩(wěn),才能真正上車使用。
所謂看得遠(yuǎn):
ET7 上這顆激光雷達(dá)在 10% 反射率下的探測(cè)距離可以做到 250 米。
根據(jù)激光雷達(dá)發(fā)射激光束碰到障礙物反射回來(lái)的基本工作原理,這里要引入一個(gè)概念:反射率。
障礙物的反射有一個(gè)指標(biāo)叫反射率:100 分的能量打到障礙物上,如果有 10 分能反射回來(lái),反射率為 10%,如果有 90 分能反射回來(lái),反射率為 90%。高速公路上的標(biāo)牌、指示牌反射率相當(dāng)高,偏暗、偏黑的衣服或者油漆、車漆,反射率多半比較低,只有 10%。10% 的反射率在自然界是非常非常少見(jiàn)的,絕大多數(shù)物體的反射率都是比 10% 高。
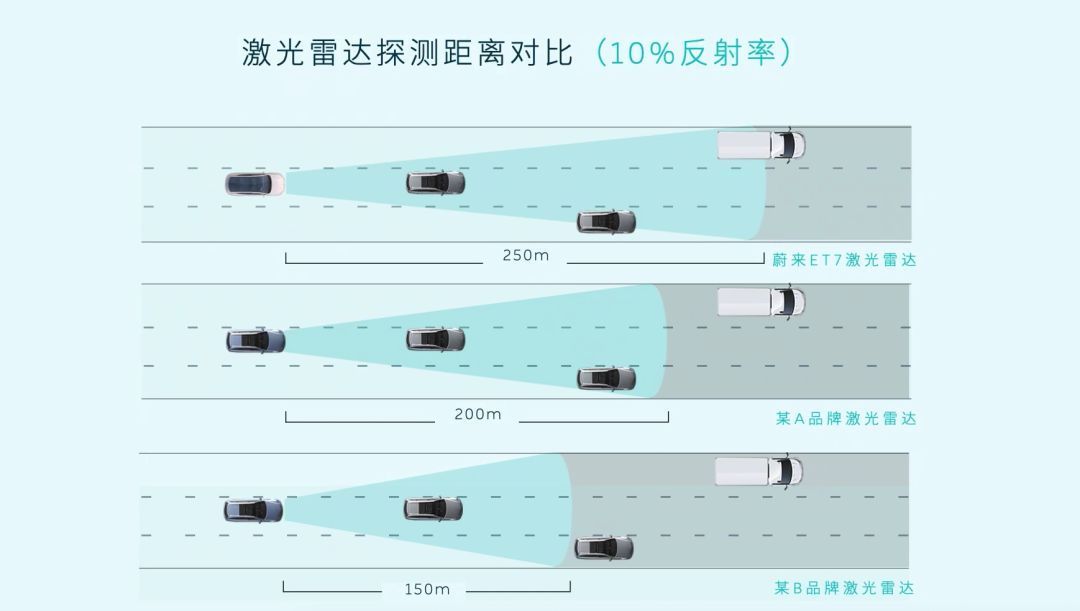
在 10% 的反射率條件下,其他的激光雷達(dá)有的探測(cè) 200 米,有的探測(cè) 150 米。蔚來(lái) ET7 上的這顆可以做到 250 米。
所謂看得清:
其實(shí)就是指分辨率高。
激光雷達(dá)輸出的東西跟攝像頭有點(diǎn)像,是一幀幀的圖像,只不過(guò)激光雷達(dá)的圖像每個(gè)點(diǎn)都帶有深度信息,是 3D 圖像。
要識(shí)別一個(gè)物體,那么這個(gè)物體需要用很多像素點(diǎn)去表征,相同大小的物體,能夠表征的點(diǎn)數(shù)越多,分辨率就越高,這個(gè)物體就被描繪得更加細(xì)致,自然就很清楚。就像手機(jī)屏幕分辨率越高,同樣一張圖就能看到更細(xì)膩、更清楚的細(xì)節(jié)。
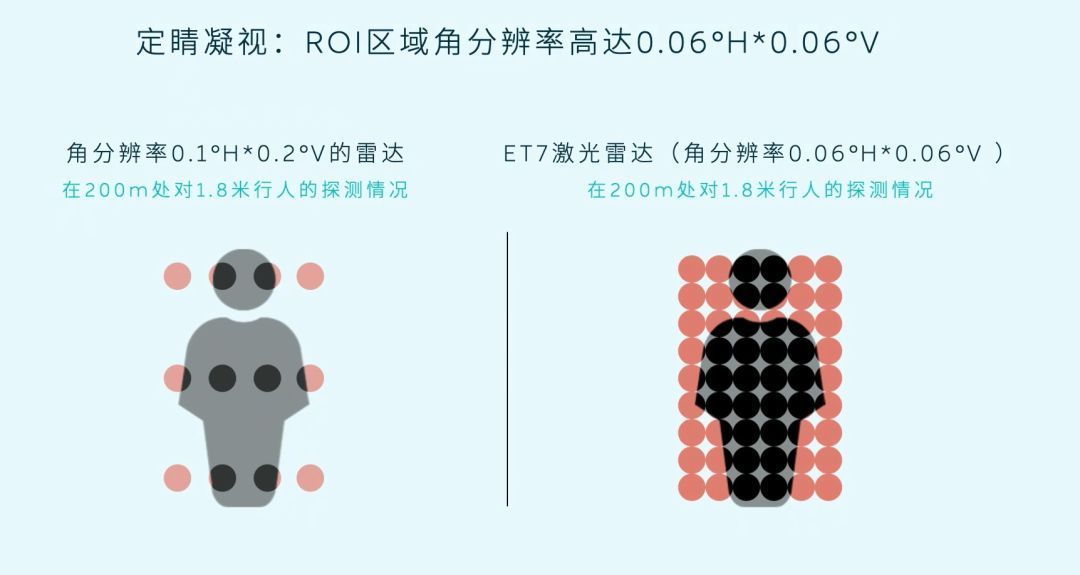
200 米處 1.8 米高的一個(gè)行人,左邊這款激光雷達(dá)(角分辨率 0.1 度乘以 0.2 度)有 12 個(gè)點(diǎn)去照在他身上,去描述這個(gè)物體。
ET7 上的這款激光雷達(dá)是 0.06 度乘以 0.06 度的角分辨率,同樣是 200 米處 1.8 米高的行人,可以看到橫向有 6 個(gè),豎向有 9 個(gè),有 54 個(gè)點(diǎn),這個(gè)分辨率比左邊這款激光雷達(dá)有將近四五倍的提升。這就是所謂的看得更清楚。
這款激光雷達(dá)還有個(gè)「定睛凝視」的功能。
通俗理解就是當(dāng)我們想看一個(gè)物體看得很清楚的時(shí)候,我們可以盯著看、凝視它,背后的原理就是把人眼的感光像素都聚焦到一個(gè)小的范圍內(nèi)。
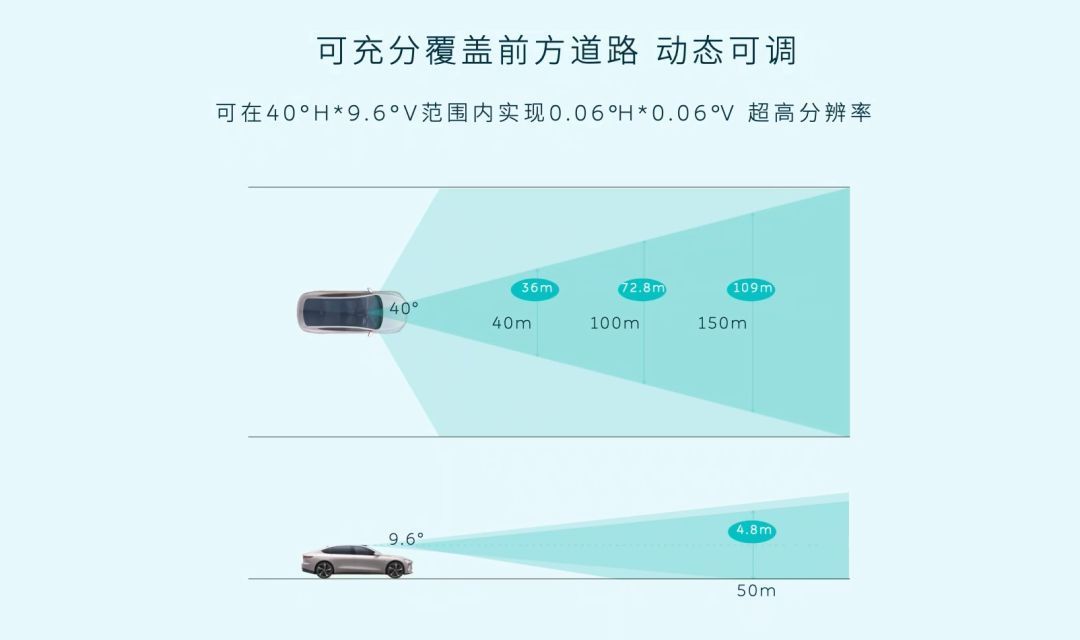
具體到參數(shù)上,這個(gè)「定睛凝視」的特性,ET7 上的這顆激光雷達(dá)在 40 度的水平、9.6 度的垂直范圍內(nèi),可以實(shí)現(xiàn) 0.06 度乘以 0.06 度的超高分辨率。
在整個(gè) 120 度的水平視場(chǎng)里,這款激光雷達(dá)會(huì)對(duì)所有的物體進(jìn)行掃描和 3D 建模,輸出 3D 點(diǎn)云圖像。其中在水平的 40 度的區(qū)域會(huì)有更高的分辨率進(jìn)行掃描,垂直方向上也是一樣的。
所謂看得穩(wěn):
關(guān)于激光雷達(dá)的看得準(zhǔn)如何評(píng)估,這里要引入一個(gè)概念 POD,探測(cè)概率。
一束激光打到障礙物上然后反射回來(lái),不是每一個(gè)點(diǎn)都能夠被準(zhǔn)確的接收。這和激光雷達(dá)接收端的靈敏度,整個(gè)系統(tǒng)的穩(wěn)定度都有關(guān)系。比如說(shuō)十萬(wàn)個(gè)點(diǎn)打出去掃描障礙物,只有九萬(wàn)個(gè)點(diǎn)回來(lái),這就是 90% 的探測(cè)概率(POD)。
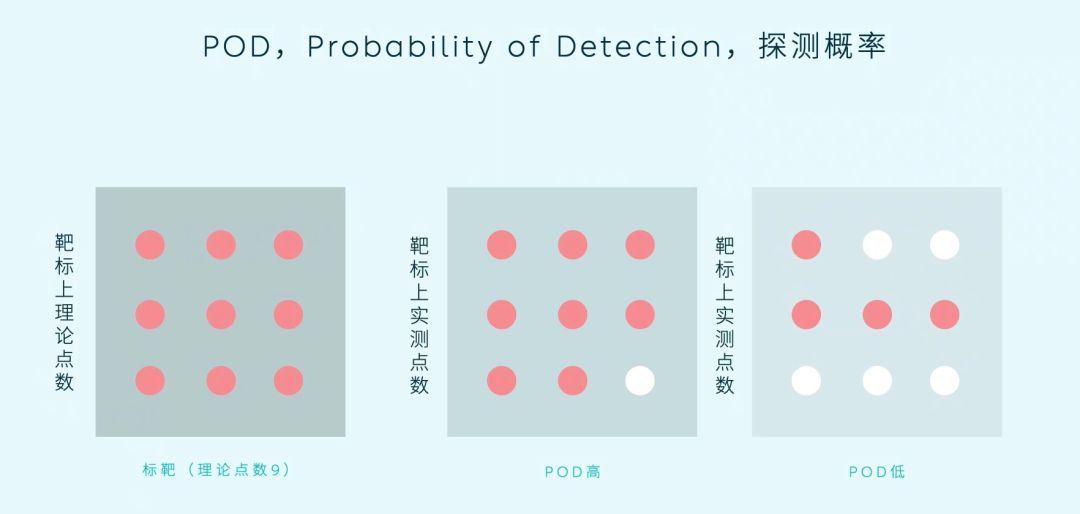
基本上,POD 值越高,實(shí)際所得的點(diǎn)云就越多,對(duì)同一個(gè)物體進(jìn)行描繪的點(diǎn)數(shù)就越多。
ET7 上這顆激光雷達(dá)的 POD 可以做到 90%,在業(yè)內(nèi)來(lái)說(shuō)是很領(lǐng)先的。
蔚來(lái) ET7 上的這顆激光雷達(dá)從立項(xiàng)到最終今年 3 月上車,經(jīng)歷了快兩年的時(shí)間。
以往,汽車行業(yè)的零部件供應(yīng)模式都是:Tier 1 將傳感器開(kāi)發(fā)好以后,交給主機(jī)廠,然后進(jìn)行上車的布置、測(cè)試、驗(yàn)收,如果驗(yàn)收通過(guò)就開(kāi)始量產(chǎn)。
這樣一種模式的問(wèn)題在于:
第一,從時(shí)間維度上講,整個(gè)開(kāi)發(fā)時(shí)間很長(zhǎng),因?yàn)?Tier 1 自己開(kāi)發(fā)需要一兩年甚至兩三年的時(shí)間,開(kāi)發(fā)完畢以后再交給主機(jī)廠進(jìn)行布置、上車、認(rèn)證,可能也需要幾年時(shí)間。
第二,Tier 1 開(kāi)發(fā)好了,主機(jī)廠如果想要做一些深度定制或者修改是很難的。既沒(méi)有時(shí)間,也沒(méi)有能力去做這件事情,這就很難把傳感器的性能發(fā)揮到極致。
基于此,蔚來(lái)和 Innovusion 走的是聯(lián)合開(kāi)發(fā)的模式。
Innovusion 本身在車規(guī)級(jí)上車這一塊,包括電路技術(shù)、整車的布置和車上的各種供應(yīng)鏈等,是略有所不足的。
而蔚來(lái)一開(kāi)始就強(qiáng)調(diào)全棧自研,強(qiáng)調(diào)正向開(kāi)發(fā),自研是蔚來(lái)的強(qiáng)項(xiàng)。
基于此,兩家就聯(lián)合開(kāi)發(fā),共同去量產(chǎn)激光雷達(dá)。
好處顯而易見(jiàn):
第一,開(kāi)發(fā)周期被極大縮短,這么一款激光雷達(dá)從立項(xiàng)到上車不到兩年時(shí)間,開(kāi)發(fā)效率很高。
第二,可以把兩家優(yōu)勢(shì)發(fā)揮到極致,在供應(yīng)鏈、可靠性和成本方面有極大的提升。
第三,這款激光雷達(dá)為 ET7 量身定制,ET7 的風(fēng)阻系數(shù)、外觀和各性能指標(biāo)都得益于這種定向開(kāi)發(fā),達(dá)到最佳最優(yōu)的狀態(tài)。
Innvusion 的 Falcon 激光雷達(dá)是半固態(tài)產(chǎn)品,包含了光學(xué)部分、機(jī)械部分(轉(zhuǎn)鏡)、結(jié)構(gòu)部分、軟件部分、電路部分。
據(jù)蔚來(lái)智能硬件副總裁白劍透露,蔚來(lái)其實(shí)是主導(dǎo)了這款激光雷達(dá)的電路設(shè)計(jì),還參與了這顆激光雷達(dá)如何進(jìn)行整車布置。外觀應(yīng)該怎樣設(shè)計(jì)?如何與車身融合?其實(shí)是蔚來(lái)給出的方案。
正是得益于雙方聯(lián)合開(kāi)發(fā),合作推進(jìn)激光雷達(dá)的量產(chǎn)上車,所以 ET7 在整個(gè)空氣動(dòng)力學(xué)上有非常良好的表現(xiàn)。即便是放在了車輛前額,有一個(gè)凸起,也沒(méi)有干擾車輛風(fēng)阻表現(xiàn)。

任何一個(gè)零部件,包括激光雷達(dá)要想上車,都要經(jīng)過(guò)九九八十一難。
需要滿足車規(guī)級(jí)的各種要求。
其中包括但不限于:
沖擊測(cè)試。沖擊測(cè)試是模擬用車過(guò)程中的各種極端用車場(chǎng)景,包括鄉(xiāng)間小路、泥濘道路、搓衣板路等等,要保證其能夠在車的十多年的生命周期里能夠耐得住這樣的環(huán)境。
在 50 個(gè) G 的加速度下進(jìn)行沖擊會(huì)不會(huì)損壞,這對(duì)于激光雷達(dá)是很大的考驗(yàn)。
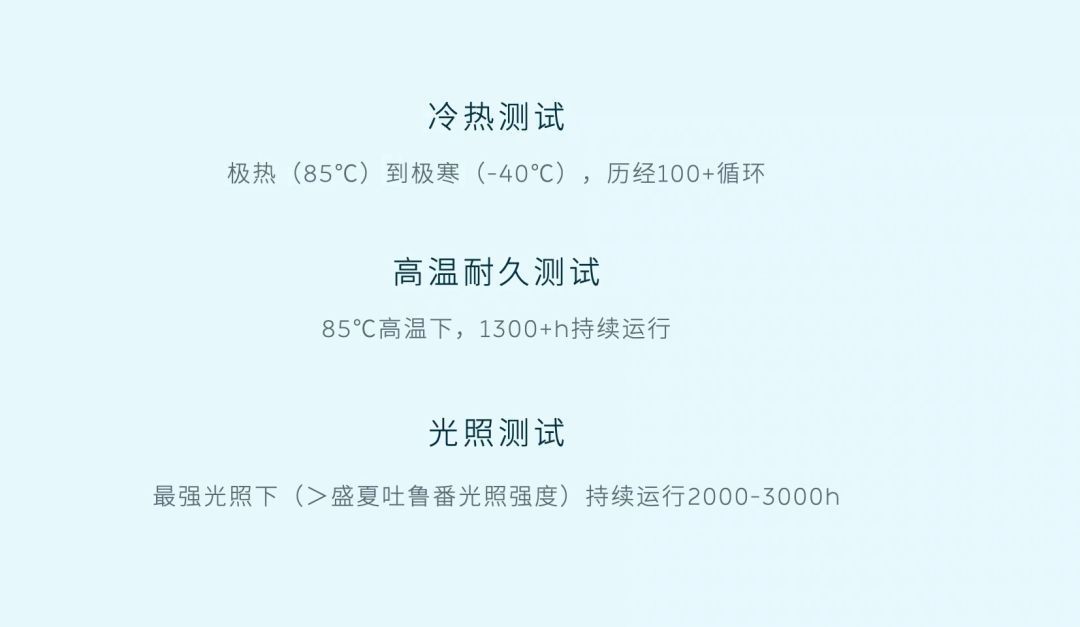
冷熱測(cè)試。汽車的使用環(huán)境是多變的,極北可以到漠河,最南可以到海南島,低溫低到零下 40 度,高溫可以到上百度,冷熱測(cè)試是不可少的,有些時(shí)候還要進(jìn)行交替,冷熱交替的沖擊。
除了冷熱測(cè)試,還要做高溫耐久測(cè)試、光照測(cè)試等等。
激光雷達(dá)還有獨(dú)特的測(cè)試項(xiàng)目。比如說(shuō)強(qiáng)光,太陽(yáng)光中也有紅外線,會(huì)對(duì)激光雷達(dá)產(chǎn)生干擾,那么強(qiáng)光下運(yùn)行的好不好?在雨霧和灰塵環(huán)境下運(yùn)行情況如何?都要一項(xiàng)一項(xiàng)測(cè)試通過(guò)才能量產(chǎn)上車。
這些所有測(cè)試,在過(guò)去的兩年里,蔚來(lái)和 Innovusion 都做得比較完整。
但這是否意味著激光雷達(dá)就是一個(gè)完全穩(wěn)定的傳感器?有了激光雷達(dá)的自動(dòng)駕駛系統(tǒng)就完全值得信賴?答案是否定的。
激光雷達(dá)的很多問(wèn)題,一方面存在于硬件原理中,另一方面則存在于軟件算法中,當(dāng)然,硬件上的「硬傷」也是可以通過(guò)算法調(diào)優(yōu)來(lái)解決,這就考驗(yàn)的是廠商的軟硬件綜合能力。
比如激光雷達(dá)的一些典型問(wèn)題如:
拖尾:激光雷達(dá)脈沖打到前面物體的邊緣時(shí),就有可能出現(xiàn)部分激光脈沖打到后面物體上,導(dǎo)致測(cè)距不準(zhǔn)或者陷入迷茫。
盲區(qū)「吸點(diǎn)」:激光雷達(dá)探測(cè)近距離物體時(shí)出現(xiàn)的測(cè)距不準(zhǔn)問(wèn)題被稱為「吸點(diǎn)」。
高反「鬼影」:對(duì)于高反射率物體,進(jìn)入到激光雷達(dá)視場(chǎng)及測(cè)距范圍后,輸出的點(diǎn)云除了在真實(shí)位置有成像以外,還容易在其它位置形成一個(gè)形狀、大小類似的成像,而這個(gè)虛假的成像被稱為「鬼影」。
高反「膨脹」:指激光掃描高反射率物體后,輸出的點(diǎn)云會(huì)向四周擴(kuò)散,看起來(lái)就像「膨脹」了一樣。
空洞:對(duì)于近處低矮障礙物,激光雷達(dá)由遠(yuǎn)及近靠近過(guò)程中,出現(xiàn)的點(diǎn)云時(shí)有時(shí)無(wú)的丟失現(xiàn)象被稱為「空洞」。
對(duì)射干擾:不同激光雷達(dá)之間如果靠得太近,不同雷達(dá)發(fā)射和接受脈沖容易被混淆,導(dǎo)致點(diǎn)云出現(xiàn)噪點(diǎn)。
……
以上的很多問(wèn)題,在 ET7 的這顆激光雷達(dá)也同樣存在,但因?yàn)檫@顆激光雷達(dá)采用了 1550nm 激光器,所以在某些問(wèn)題上表現(xiàn)更優(yōu),而且通過(guò)蔚來(lái)和 Innovusion 的長(zhǎng)時(shí)間測(cè)試和聯(lián)調(diào),大部分問(wèn)題得以將負(fù)面影響降到最低。
激光雷達(dá)從開(kāi)發(fā)到量產(chǎn),是一個(gè)工業(yè)化的過(guò)程。
激光雷達(dá)是一個(gè)非常復(fù)雜的器件,里面有上百個(gè)零部件,電路有幾百個(gè)芯片和其他的元器件,生產(chǎn)需要強(qiáng)大供應(yīng)鏈和工廠產(chǎn)線。而且還要保證生產(chǎn)一臺(tái)、一萬(wàn)臺(tái)、一百萬(wàn)臺(tái)甚至幾百萬(wàn)臺(tái)的一致性、可靠性都沒(méi)有問(wèn)題。蔚來(lái)和 Innovusion 的工業(yè)化團(tuán)隊(duì)合作起來(lái)克服了這些難關(guān)。
生產(chǎn)線方面,Innovusion 與業(yè)界知名的均勝普瑞合作,在 2021 年建成了全工業(yè)化的高性能激光雷達(dá)產(chǎn)線,年產(chǎn)能可達(dá) 10 萬(wàn)臺(tái)。

2022 年 3 月 28 日,蔚來(lái) ET7 開(kāi)啟交付。經(jīng)過(guò)后續(xù)的自動(dòng)駕駛功能包更新,這款車上基于激光雷達(dá)實(shí)現(xiàn)了 ACC(自適應(yīng)巡航控制) 和 LCC(車道居中控制)功能的量產(chǎn)。此外,更高級(jí)別的領(lǐng)航輔助駕駛功能 NOP+ 將會(huì)在今年三季度開(kāi)放使用。
而往后走,蔚來(lái) NAD 的相關(guān)功能也將逐步開(kāi)放,激光雷達(dá)將在其中擔(dān)綱更重要的角色。
來(lái)源:第一電動(dòng)網(wǎng)
作者:HiEV
本文地址:http://m.155ck.com/kol/180022
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請(qǐng)聯(lián)系admin#d1ev.com(#替換成@)刪除。


相關(guān)圈子


先估價(jià)再買車,買的放心開(kāi)的安心
您的詢價(jià)信息
已經(jīng)成功提交我們稍后會(huì)聯(lián)系您進(jìn)行報(bào)價(jià)!


網(wǎng)大牛說(shuō)專欄作者")





 京公網(wǎng)安備
11010502033163號(hào)
京公網(wǎng)安備
11010502033163號(hào)