作者 | 德新
編輯 | 王博

1024,是程序員的節日。
但在汽車行業,因為小鵬,這幾年1024已經逐漸變成汽車科技的秀場。
小鵬的1024科技日始于2019年。
2020年,智能駕駛XPILOT和智能座艙XmartOS成為小鵬最重要的兩個技術標簽。
2021年,高速NGP橫空出世仍讓人記憶猶新。高速NGP流暢、本土化的體驗,一下就刷新了大家對輔助駕駛技術的認知,也很大程度加速了這個行業的(發展)內卷。
現在的1024,既是觀察小鵬科技儲備的絕佳窗口,也是衡量國內汽車科技發展水平的一個風向標。
作為一家以「智能科技」為核心賣點的車企,小鵬在2022年的布局已經大幅超出了汽車本身。小鵬所展示的黑科技,既有大家熟悉的智能駕駛、智能座艙,也有更面向未來的智能機器人甚至飛行汽車。
作為一家頭部的新勢力,硬科技車企的代表,小鵬對未來出行是怎么思考的?
首先聊聊備受期待的城市NGP。
高速NGP - 城市NGP - 全場景輔助駕駛(XNGP)- 全自動駕駛,這是小鵬看到的智能駕駛的演進路徑。
用小鵬自動駕駛副總裁吳新宙的話說,「單場景輔助駕駛是上半場,全場景輔助駕駛是下半場。」

城市NGP是開啟下半場競爭的前奏,我認為也是輔助駕駛發展的一個拐點。
此前,XEV研究所做了不少車主調研,很多新能源車主之所以不用輔助駕駛,是因為缺乏高速路的使用場景,而城區路又用不了。小鵬給了更精細的數據:用戶的用車時長中,90%是在城市道路;從頻率上看,用戶100%每天都會經過城市道路,但只有25%的用戶會經過高速路。
城市NGP比高速NGP要難上百倍。小鵬的實操經驗是:相比高速NGP,城市NGP的代碼量提升至6倍,感知模型數量提升至4 倍,預測/規劃/控制相關的代碼量是88倍...
所以在這個過程中,也有人勸小鵬的自動駕駛團隊,為什么要去做這么難的城市場景,而不是做一些難度更低、收益更快的場景?吳新宙表達的是,「這是難且正確的事」。
城市場景作為最高頻剛需的場景,會很大程度提升用戶對輔助駕駛功能的感知,拉動用戶對輔助駕駛軟件的付費意愿,同時拉大小鵬作為領先企業和其他車企的差距。
像很多新技術一樣,從不好用到好用,到產生依賴,存在一個臨界點,輔助駕駛也是如此。
何小鵬在初體驗城市NGP早期版本時,覺得系統就是一個新手司機,隨時要準備接管;但到10月份體驗第4個版本時,已經覺得是一個開車水平強一些的司機。他認為隨著技術打磨,用戶從不信任到依賴的這個轉折點快要到了。
從技術層面上,城市NGP主要解決了兩方面的問題:
第一,應對由城市場景本身的復雜特征帶來的挑戰,比如車輛、行人密集且會出現大量相互遮擋,并且目標的運動軌跡更加不規則和多元,靜態的道路環境也在持續發生變化。
具體而言,小鵬從視覺感知、傳感器融合、行為預測、規劃控制等方向上做了大量的工作。
比如針對密集場景的物體檢測,放棄了原NGP的物體檢測神經網絡架構,重新搭了一套架構;啟用業界最新的單目3D檢測網絡,直接通過單目RGB相機來預測物體大小、朝向、距離和速度;設計新的車輛轉向燈識別網絡;利用數據閉環,解決各種長尾下的紅綠燈識別問題,等等。
第二,要在有限的資源上,將功能產品化兌現給用戶。P5上只有30 Tops算力的Xavier計算平臺,相比后來的OrinX資源非常有限,這要求有強大的工程化能力,包括模型優化和部署等等。
目前業界在一塊Xavier上實現城市NGP并交付的車企,只有小鵬一家。據說這個事情,曾有友商多次跟小鵬內部求證,是只用了一塊,而不是兩塊或者更多。這也側面反映了工程化難度之大。
目前,城市NGP已經在P5上開始全量推送,因為高精地圖的原因,廣州是可以開啟城市NGP的首發站,接下來將是深圳和上海。
在已推送城市NGP的用戶車輛上, 城市NGP里程滲透率達到約63%,城市NGP下的通行效率接近人類駕駛員的90%,每百公里接管次數0.6次。
城市NGP百公里0.6次接管什么概念呢?假設你每天通勤60公里,5天300公里,那在一周的工作日內,你的周平均行駛接管次數不超過2次。據我所知,這個數據甚至好于一些Robotaxi公司在測試區的接管數據。
城市NGP首發量產,是小鵬自動駕駛技術體系的冰山一角。

2023 - 2025年,小鵬這個階段的主要目標是攻克全場景輔助駕駛。
全場景輔助駕駛的精髓,我認為是用一個很強的視覺感知底子作為主干,減少對高精地圖的依賴,從而做到「有圖體驗完美,沒圖體驗也能一流」。
為什么強調減少對高精地圖的依賴,因為高精地圖的許可和更新都很難。
包括城市NGP在內,國內頭部車企/自動駕駛公司的城市NOA落地,目前多少都受到高精地圖審批的影響。何小鵬說,原以為城市NGP在明年第一季度可以大范圍鋪開,實際上只規劃了幾個城市。
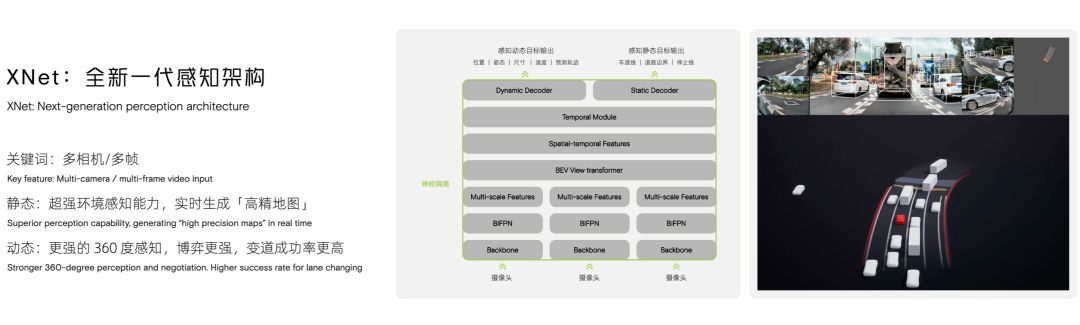
為了擺脫對高精地圖的依賴(或者在沒有圖的情況下依然能做到完美表現),小鵬開發了新的感知模型架構XNet,XNet以多相機、多幀的圖像作為輸入,輸出的是動態和靜態目標的感知結果。
靜態目標的集合,相當于是實時的高精度地圖;
針對動態目標,因為網絡具有360°的視角,系統的博弈能力會更強,變道成功率也會更高。
這樣一個大模型,需要大數據投喂,也需要大算力來訓練和部署。
根據小鵬測算,XNet訓練數據的數據標注工作,大概需要50 - 100萬段的短視頻,手動標注需要2000個人年(1000人團隊2年時間)來完成;用單個服務器來訓練需要276天;模型訓練完,直接部署到車端的話,一個Orin-X還不夠,需要1.22個Orin-X。
為此,小鵬對應開發了全自動標注系統,將2000人年壓縮到了16.7天,小鵬今年新建的自動駕駛智算中心「扶搖」運用在訓練上,可以把模型訓練的時間壓縮602倍;再通過對Transformer算子的重構,XNet的模型部署最后占用了Orin-X 9%的算力就完成了。
這段太繞了是吧?簡單來說,就是場景很難,算法復雜,極耗資源。怎樣用更少的資源在短時間內做出好的效果,考驗工程能力。XNet就恰好反映了小鵬在自動駕駛上全面系統的工程能力。
其實到了2022年,從單點功能上,比如5家車企的LCC,已經較難區分出很大的差別。輔助駕駛的能力PK,更多考驗的是對困難復雜場景,甚至罕見場景的應對能力,而這部分能力的增長需要強大的數據閉環。
數據閉環有4個關鍵環節,采集 - 標注 - 訓練 - 部署,后3個環節在上面都有提到。
采集環節,小鵬目前有超過10萬輛帶XPILOT系統的車型。吳新宙透露,小鵬已經開發了超過300個觸發器,每周可以根據特定的場景需求進行專門的數據采集。
城區輔助駕駛開發的精髓是通過神經網絡來構建復雜的代碼,因為人工編寫在海量的復雜場景面前,很快會到達瓶頸。因此核心的競爭是數據閉環的能力和效率。
在這點上,小鵬無論從錢(建立智算中心)、人(團隊規模)、車隊(量產車數量),應該都是國內目前走得最快,步子邁得最大的公司。輔助駕駛的上半場靠精英人才投入和工程積累,下半場在上半場基礎上,拼的更多的是系統能力和效率。
哦,對了。
還有One more thing,小鵬計劃在明年和后年開始,從廣州起步來部署Robotaxi,大概率會基于G9開始投放,希望以Robotaxi和輔助駕駛兩條線,形成功能和數據的互補。
輔助駕駛和智能座艙,是小鵬智能化標簽的左膀右臂。
前兩年P7的座艙,已經刷新了行業的座艙語音交互標準。就算到今年,小鵬在P7上提出的全場景語音交互、連續對話、可見即可說的能力,還是行業內其他車企旗艦車型追求的功能標準。
P7的語音能力,定義了語音作為智能汽車交互入口的范本。從這點上來說,我個人認為它的獨特性,甚至大于同時期XPILOT在智駕領域的突破。

今年,小鵬推出了全場景語音2.0體系。簡單來說,就是多人在車內對話的狀態,越來越接近正常對話的狀態,而不需要人來遷就機器。
比如全時在線功能,不需要喚醒;一句話最多支持4條指令的同時執行;MINO多音區功能,相當于語音助手有多個分身,車內多人各說各的,同時反饋和執行。從響應、執行速度上,2.0版本也有不少指標刷新了行業最快成績。
座艙語音交互能力還能持續壓榨,背后除了8155帶來的水漲船高之外,小鵬已經開始深入語音技術的底層,包括:聲學信號處理、本地語音識別、在線語音識別等等。這些典型語音基礎能力 ,這是一般車企不會涉足的領域。
小鵬的第二代語音架構全棧自研,再度說明,小鵬對語音的探索,已經進入到非常前沿的地帶。第三方供應商在技術方案和迭代速度上,難以滿足需求。小鵬內部認為,自研方案的先進性更高,資源使用和數據成本都更低,也有助于拉開差距,形成獨特的產品競爭力。
另外,小鵬的海外車型,也會采用自研的語音架構。
與特斯拉類似,小鵬也在通過小鵬鵬行造機器人,甚至小鵬啟動的時間點更早,6年前就開始了。
這屆1024上,第二代智能機器人亮相:
頭部集成了AR投影,是對機器人交互形式的探索;
足底使用“EVA超臨界發泡”及耐磨橡膠,緩震、靜音與耐磨性能提升;
頸部等區域使用新型彈性織物與液態硅膠材料,解決多自由度運動的設計問題,且耐沖擊、耐刮擦;
尾部增加了機械臂,可執行更多的功能;
算力平臺,采用與高端智能汽車同級別的平臺;
電池系統,采用車規級電池系統,BMS和電池Pack 一體化設計,更加緊湊、安全;
熱管理系統智能化,大幅提升智能機器人極限性能。
據何小鵬介紹,目前圍繞智能機器人的開發,核心是在打磨幾方面的能力:行動的靜謐性;在狹窄環境下的避障能力;以及機械臂的多場景應用。
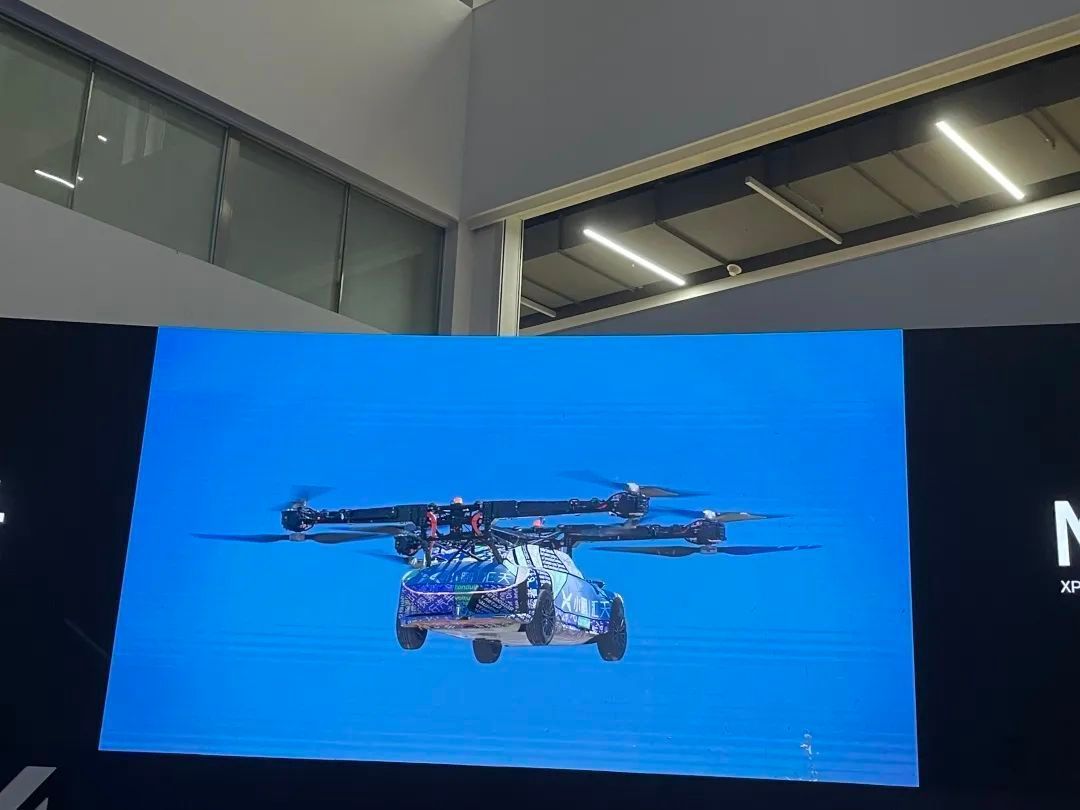
最后,繼10月份完成迪拜海外首飛之后,小鵬匯天的飛行汽車也在這屆1024活動上進行了亮相,內部研發代號為X3。
在去年發布的飛行汽車概念的基礎上,X3改變了構型,具備機臂折疊收納系統,可進行陸行和飛行模式的切換。
在機臂折疊收納狀態,它的尺寸和常規汽車相當,能夠在開放道路自由行駛;在法規、環境允許的條件下,垂直起降,飛行跨越擁堵、障礙、河流等,滿足人們短距離低空出行的需求。
X3的試驗車整備質量接近2噸。目前基于X3,匯天的飛行汽車已完成試驗樣車首飛。匯天的目標是在X3的基礎上實現量產。小鵬之前已經宣布,希望在2024年推出量產飛行汽車,成本不高于100萬元。
在X3上,匯天完成飛行汽車量產的兩大挑戰:
第一是飛行控制。在螺旋槳直徑接近 4 米的情況下, 對轉動慣量的控制和響應速度要求很高;
其次,動力系統要讓2噸級的車輛起飛,所需動力是地面行駛的15倍。電池放電功率密度、能量密度要遠超目前汽車行業平均水平,還需要更好的熱管理系統,并考慮動力冗余需求。
何小鵬也很坦誠,X3的電池目前可以支撐車輛行駛幾百公里,但飛行的話,只能支撐幾十公里。
總結:
我在小鵬廣州總部的現場看完了這場1024,這場活動一點不像車企的技術日,倒非常像GoogleX的科技展示。
整個發布會前半場非常硬核,后半場很fancy。很多時候,大家的注意力容易被后半部分那些炫目的概念吸引,甚至網上有聲音質疑小鵬布局太多,智能機器人和飛行汽車的商業化路徑不清晰。
但從整個時長分配來說,小鵬是非常務實的。75分鐘的發布會,智駕部分占了50分鐘。當下與未來,詩和遠方,邊界非常清晰。
無論是城市NGP,還是飛行汽車,小鵬在前沿科技上的探索,有很大一部分已經進入到前人未至的無人區。這意味著,市場上沒有同類競品,無從對標,也沒有供應商具有成熟經驗,其中有大量全新的定義和自研工作,極度考驗一家車企對未來的判斷、執行力和交付能力。
小鵬過去8年在硬核技術上的積累,已經構建起一個完善的科技體系,在不同的產品上,人工智能、人機交互、動力系統等領域有相當一部分可以復用,甚至可以通過產品之間的反哺,形成獨特的領先性。
印象最深刻的是,何小鵬和吳新宙,都提到了做「難且正確的事」,打造「讓用戶驕傲的科技產品」。
輔助駕駛、智能座艙、智能機器人和飛行汽車,是否足夠令人興奮、讓人驕傲?現場的車主們已經回應了一個狂熱的「YES」。
來源:第一電動網
作者:HiEV
本文地址:http://m.155ck.com/kol/187667
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!







 京公網安備
11010502033163號
京公網安備
11010502033163號