當(dāng)下的智能駕駛已經(jīng)達(dá)到怎樣的水準(zhǔn)了?借助各種傳感器,如雷達(dá)、激光雷達(dá)、攝像頭、導(dǎo)航系統(tǒng)等對(duì)車輛周圍的環(huán)境進(jìn)行掃描與檢測(cè)后,車輛完全可以在道路上自主行駛,無需人工干預(yù)(突發(fā)情況除外),就可提供更加精準(zhǔn)的行車規(guī)劃、安全監(jiān)測(cè)與路徑分析,從而無縫銜接到高速、城市、地下停車場(chǎng)等各個(gè)場(chǎng)景的應(yīng)用。
解決技術(shù)問題之前,當(dāng)前汽車行業(yè)亟需解決這樣一個(gè)難題:在產(chǎn)品同質(zhì)化嚴(yán)重的環(huán)境下,如何跨越智能化的拐點(diǎn)?以城市導(dǎo)航輔助駕駛產(chǎn)品為例,前不久上市的阿維塔11單電機(jī)版車型核心亮點(diǎn)之一是搭載基于華為ADS智能駕駛解決方案打造的AVATR ANS智能領(lǐng)航系統(tǒng),其能夠?qū)崿F(xiàn)城區(qū)NCA智駕導(dǎo)航輔助駕駛,華為終端BG CEO、智能汽車解決方案BU CEO余承東稱其自動(dòng)輔助駕駛為“最強(qiáng)地表”。
不過,對(duì)于余承東的“自詡第一”,小鵬自動(dòng)駕駛中心副總裁吳新宙似乎不以為然,在被問及小鵬的智能駕駛、他所領(lǐng)導(dǎo)的這個(gè)團(tuán)隊(duì)在整個(gè)行業(yè)內(nèi),甚至是在中國(guó)、世界大概處于一個(gè)怎樣的位置時(shí),他的回答是:“在中國(guó),我認(rèn)為我們應(yīng)該是在第一名這個(gè)位置。”
兩者可謂是龍爭(zhēng)虎斗,那么它們究竟有著怎樣的區(qū)別,這次我們重點(diǎn)從體驗(yàn)方面來講講。
先來說說阿維塔11城區(qū)NCA智駕導(dǎo)航輔助。
目前阿維塔11已經(jīng)在上海、深圳、廣州落地了城市NAC導(dǎo)航輔助駕駛功能,幾乎國(guó)內(nèi)所有高速與快速路都能使用它。
基于華為ADS智能駕駛解決方案打造的AVATR ANS智能領(lǐng)航系統(tǒng),硬件方面標(biāo)配了34顆智駕傳感器,含激光雷達(dá)3顆、毫米波雷達(dá)6顆、高清攝像頭13顆、超聲波雷達(dá)12顆以及AVATRUTH超算系統(tǒng)在軟件層面交互博弈算法加持。
我們?cè)隈{駛過程中,覺得阿維塔11 NAC激活操作很方便,當(dāng)車輛識(shí)別到道路環(huán)境允許啟動(dòng)NCA時(shí),儀表上方會(huì)顯示一個(gè)灰色三角箭頭的指示,將換擋桿連續(xù)撥動(dòng)兩次就可開啟,需注意的是向上撥動(dòng)一次或者踩剎車就會(huì)解除,當(dāng)車輛啟動(dòng)后,方向盤右側(cè)的圓球快速向上滑動(dòng)就可以調(diào)整車輛的最高行駛速度。
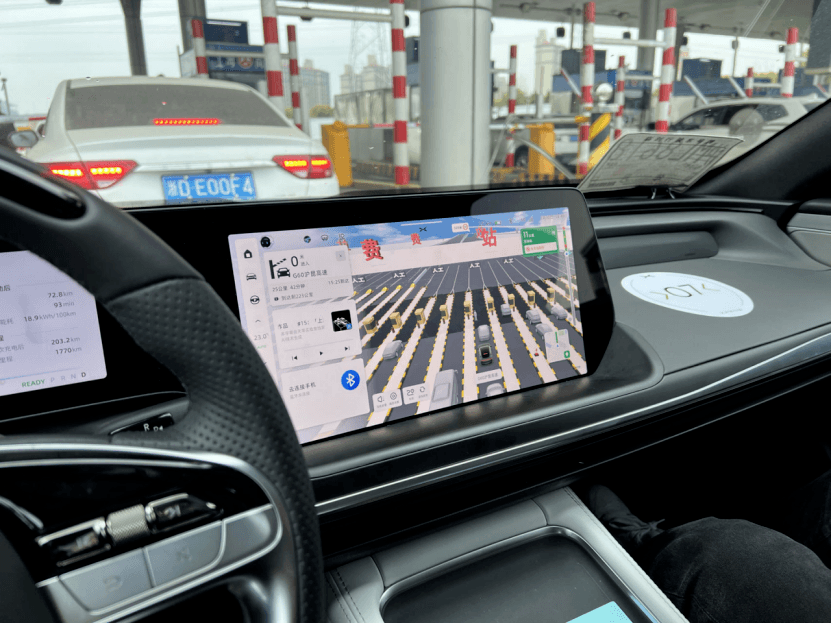
高速中啟動(dòng)NCA后,車輛的“自主權(quán)”就交給了AVATR ANS智能領(lǐng)航系統(tǒng),它會(huì)根據(jù)用戶出發(fā)前設(shè)定的最高車速與導(dǎo)航目的地,實(shí)時(shí)監(jiān)控道路環(huán)境,給出相應(yīng)的方案,比如車輛識(shí)別到相鄰車道的車輛有變道超車的意向,該車以保持自身安全為前提做出避讓措施,全程無需用戶進(jìn)行操作。不過,考慮到用戶的安全問題,若用戶將手完全脫離方向盤后,脫離時(shí)間約在1分鐘系統(tǒng)就會(huì)作出警告。
另外,阿維塔11城區(qū)NAC可精準(zhǔn)識(shí)別窄路、小路以及非混行的輔助路況,對(duì)行人、機(jī)動(dòng)車、非機(jī)動(dòng)車以及障礙物都能進(jìn)行實(shí)時(shí)分析,靈活避讓。尤其是遇到擁堵路段,城區(qū)NAC功能在實(shí)現(xiàn)了基本的點(diǎn)對(duì)點(diǎn)領(lǐng)航功能外,還能“靈動(dòng)”地避開各種加塞與借道緊急避讓,對(duì)紅綠燈的識(shí)別也十分精準(zhǔn),另外它不受啟動(dòng)速度的限值,在系統(tǒng)識(shí)別道路環(huán)境允許啟動(dòng)NCA,就可默認(rèn)以道路限速環(huán)境下智能駕駛。需要注意的是,目前AVATR ANS智能領(lǐng)航系統(tǒng)在城區(qū)駕駛的部分極端條件下也需要人接管,因?yàn)樗乃惴ǖ讓舆壿嬍腔诟呔貓D數(shù)據(jù)的覆蓋。
然后就是智能泊車功能,阿維塔11在360度感知能力、高計(jì)算能力下,可精準(zhǔn)識(shí)別空車位與周邊靜態(tài)車輛、障礙物與動(dòng)態(tài)車輛、行人,所以支持泊入垂直、水平、斜列、空間車位、斷頭路、窄車位等復(fù)雜車位以及RPA遙控泊車。
再來說說小鵬XNGP。
眾所周知,高精地圖一定程度上能夠減少攝像頭等傳感器,因識(shí)別判斷周圍環(huán)境信息所產(chǎn)生的計(jì)算量,可以獲得更高精度的定位、輔助環(huán)境感知、做出相應(yīng)的規(guī)劃與決策,不過華為、蔚來、小鵬、理想、地平線等超過8家企業(yè)一致認(rèn)為過度依賴高精地圖會(huì)局限自動(dòng)駕駛的發(fā)展。
目前,小鵬汽車已正式推出不依賴高精地圖的XNGP,那么它的表現(xiàn)如何?
XNGP已實(shí)現(xiàn)第一階段能力,覆蓋G9 Max及P7i Max版車型,在廣州、深圳、上海高精地圖覆蓋的城市開放城市NGP。此外,還大幅提升全國(guó)其他無高精地圖覆蓋區(qū)域的智能駕駛以及第二代SR智能輔助駕駛環(huán)境模擬顯示系統(tǒng)。至于XNGP開放第二階段能力將在2023年下半年實(shí)現(xiàn),具備大部分無圖城市開放變道、超車、左右轉(zhuǎn)能力;XNGP進(jìn)化至終極形態(tài)將在2024年上半年實(shí)現(xiàn)從起點(diǎn)停車位到終點(diǎn)停車位的智能導(dǎo)航輔助駕駛能力。
小鵬汽車表示,XNGP是國(guó)內(nèi)首個(gè)且唯一啟動(dòng)XNet深度視覺感知,在有高精地圖的區(qū)域,仍具備高速NGP、城市NGP等能力;不依靠高精地圖時(shí),在LCC增強(qiáng)版基礎(chǔ)上,逐步增加新的能力,在無圖區(qū)域的功能表現(xiàn)無限接近NGP。
據(jù)官方介紹,XNGP的視覺感知架構(gòu)是由兩個(gè)激光雷達(dá)、800W像素高清攝像頭等高端硬件能力加持,為車輛提供360度環(huán)境感知能力,覆蓋8條車道,甚至可覆蓋駕駛員視野盲區(qū)的非機(jī)動(dòng)車/行人,加之智能輔助駕駛芯片搭載的是雙Orin-X芯片,提供508TOPS高算力,讓XNGP的駕駛能力與“老司機(jī)”一般。
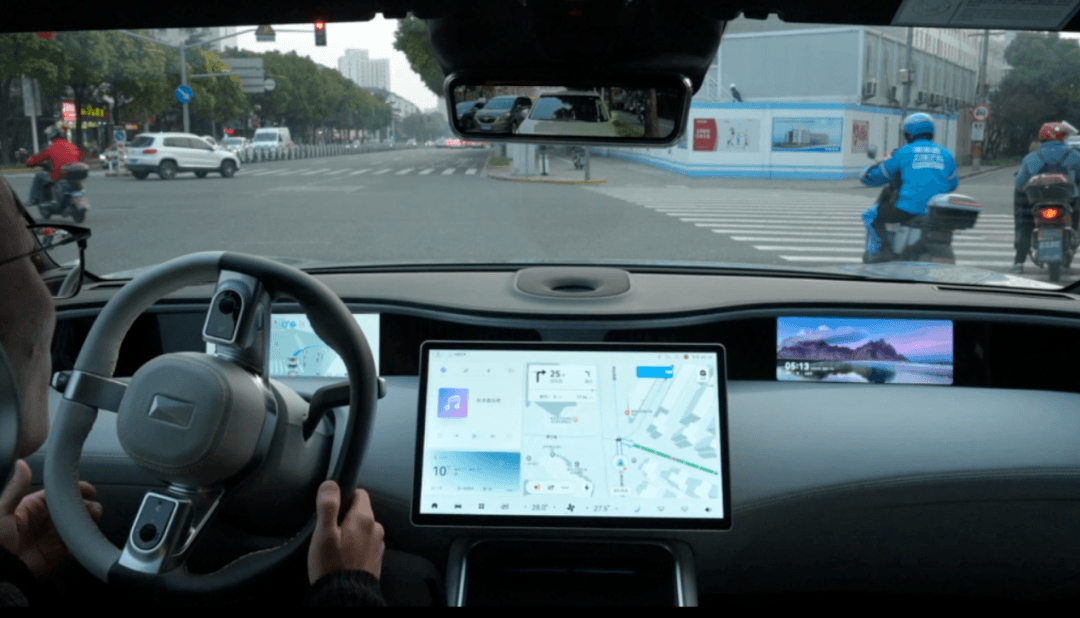
在真實(shí)測(cè)試中,小鵬搭載的LCC-L不依賴高精地圖的情況下,給了我們很大的驚喜,LCC-L與城市NGP功能讓人難以區(qū)分。

比如在視覺上,除了城市NGP圖標(biāo)外,基于BEV實(shí)時(shí)構(gòu)建的圖標(biāo)、限速標(biāo)志等信息,該車對(duì)車道線(真實(shí)的曲度、虛實(shí)、箭頭,停止線、斑馬線)的識(shí)別都很精準(zhǔn),所以LCC-L與城市NGP的SR儀表盤沒什么區(qū)別。
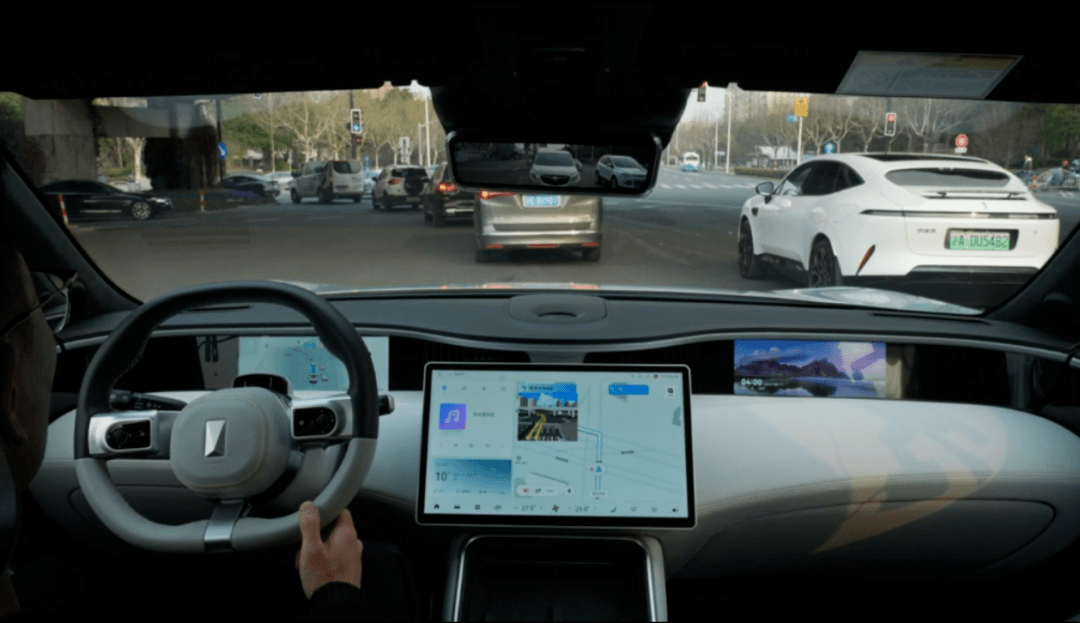
結(jié)合場(chǎng)景我們發(fā)現(xiàn),小鵬LCC增強(qiáng)版可自主通過十字路口,在前方無車輛的情況下,該車基于紅綠燈剎車而啟動(dòng),并直接通過中間沒有車道線,人車混行的十字路口,甚至還能搶行黃燈。說明小鵬搭載的LCC功能可以認(rèn)識(shí)且理解紅綠燈的含義,并能夠?qū)?yīng)信號(hào)燈所行的車道。
另外,車輛在無車道線的路口時(shí),也能做出準(zhǔn)確的判斷,當(dāng)車道線不清晰時(shí),LCC-L會(huì)緩慢前行,嘗試找尋前方的道路線。不過LCC-L在猶豫不決時(shí),就需要駕駛員干預(yù)了,而此時(shí)LCC-L并未退出,等駕駛員完成變道后,該功能仍處于工作狀態(tài)。
電動(dòng)勢(shì)有話說:
總的來說,華為ADS表現(xiàn)得激進(jìn)一些,同樣是窄道場(chǎng)景,老司機(jī)都不敢輕易通過,基本都是先減速后通過,而華為ADS只要感知到安全就會(huì)通過,車輛在500m外就能識(shí)別紅綠燈;小鵬XNGP的表現(xiàn)就顯得柔和一些,該打燈、帶一腳加速、快速變道等操作時(shí),表現(xiàn)一氣呵成。當(dāng)然了,小鵬XNGP的底層邏輯仍是依賴高德地圖,所以在過隧道時(shí),小鵬的中控SR顯示的數(shù)據(jù)存在一定的滯后,不過小鵬表示后期會(huì)引入XNGP的實(shí)時(shí)地圖。
至于在未來的高階智能輔助駕駛規(guī)劃上,華為明確表示將全棧研發(fā)出基于純視覺感知的華為ADS2.0,小鵬已開始深度視覺感知的XNet,構(gòu)建實(shí)時(shí)的高精地圖。那么,在高階智能駕駛路上,吳新宙和余承東究竟誰能勝出,一切還尚未可知。
來源:第一電動(dòng)網(wǎng)
作者:電動(dòng)勢(shì)
本文地址:http://m.155ck.com/kol/200020
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請(qǐng)聯(lián)系admin#d1ev.com(#替換成@)刪除。









先估價(jià)再買車,買的放心開的安心
您的詢價(jià)信息
已經(jīng)成功提交我們稍后會(huì)聯(lián)系您進(jìn)行報(bào)價(jià)!

網(wǎng)大牛說專欄作者")

 京公網(wǎng)安備
11010502033163號(hào)
京公網(wǎng)安備
11010502033163號(hào)