在智能駕駛領域,最火熱的話題莫過于:去高精地圖。
但城市輔助駕駛苦高精地圖久矣。成本高、「鮮度」要求高、開放城市少的高精地圖在城市 NOA 普及的過程中,成為了車企難以言喻的痛,連華為終端 BG CEO、智能汽車解決方案 BU CEO 余承東都忍不住在公眾場合大吐苦水,與此同時,小鵬、華為、理想、蔚來都紛紛對外釋放了去高精地圖的城市 NOA 計劃。
同為造車新勢力的智己,卻有著自己的見地,在各家如火如荼去「高精地圖」之時,智己堅持「重地圖」和「輕地圖重感知」兩腿走路。
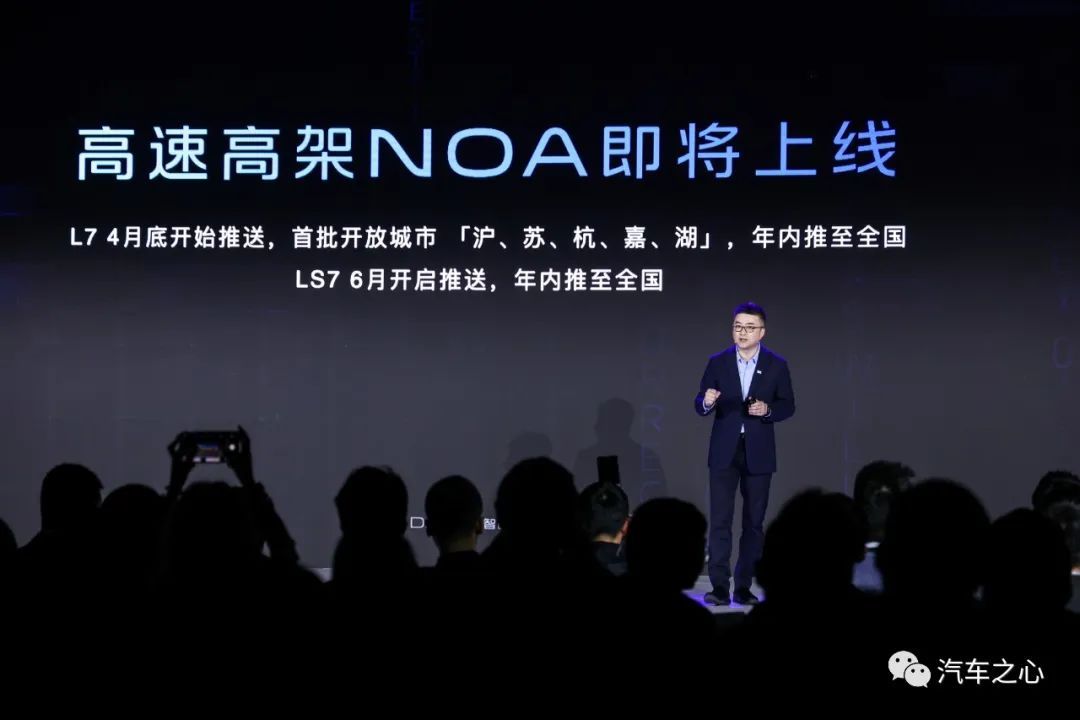
在上海車展前夕,智己 CEO 劉濤在 IM AD DAY 上正式發布智己高速 NOA:
L7 車型的高速 NOA 功能預計 4 月底開啟推送,LS7 車型預計 6 月份推送;
首批開放城市為上海、蘇州、杭州、嘉興、湖州;
兩款車型的 NOA 功能將在年內面向全國高速高架開放。
隨著年內智己城市 NOA 投入公測,智己 IM AD 將完全打通高速和城市場景。
01、智己高速 NOA 挑戰蘇州
在市場上,其他車型早早已經推出高速 NOA,甚至是城市 NOA 功能,智己高速 NOA 的姍姍來遲似乎無法給我們帶來「新鮮感」。但是當我體驗高速 NOA 的兩個小時里,我的想法發生了改變。
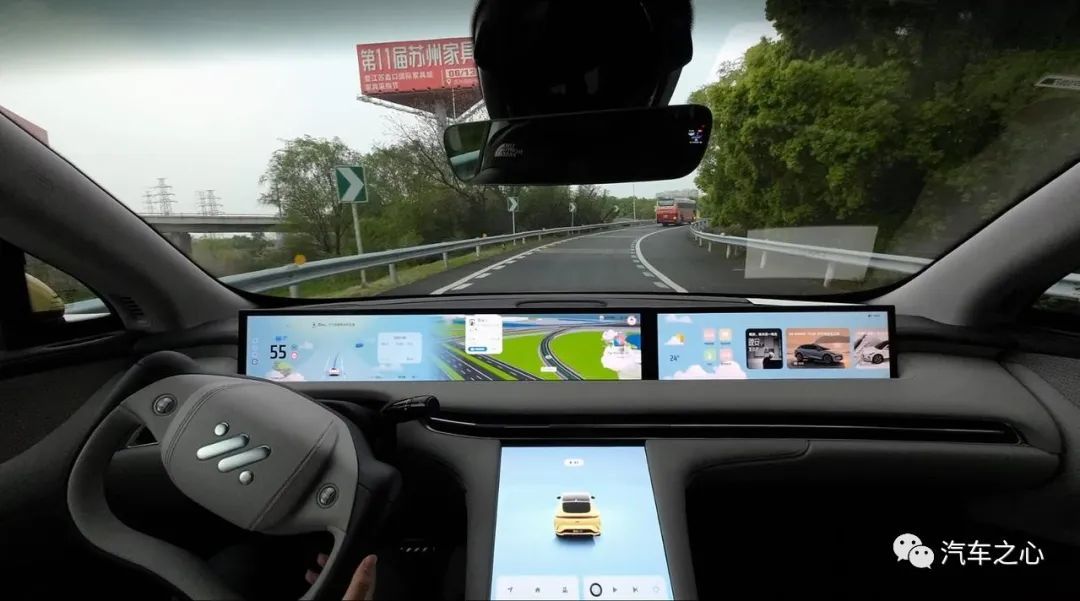
這次的體驗路線位于蘇州陽澄湖附近的常嘉高速和滬常高速路段。
由于是連接城市的高速路,我們在路上看到不少運輸貨物的大車,這剛好能體現出智己 NOA 避讓大車的能力。
和體驗其他方案的避讓大車功能不同,智己 NOA 的避讓會顯得更加線性。
一般來說,其他方案會突兀地轉動方向盤避開,等大車遠離,又生硬地扳回方向盤,繼續行駛原本路線。而智己則會輕輕地轉動方向,隨著行駛路線稍微偏離大車,整個過程流暢無感。
其次,遇到車流開始密集的時候,智己 NOA 會主動變道,選擇最佳路線。
圖片中的紅車,在我們前面經歷了三四次變道,可是最終的通行效率卻不理想,選擇中間車道的智己 NOA,則很快駛離了這片車流密集的區域。
來到第三個場景,智己高速 NOA 根據導航的路線規劃,離匝道口處 1 公里左右時擇機進入匝道。這可以最大程度避免匝道擁堵、大車占道時的情景。
第四,面對匝道上的急彎,智己 NOA 能控制好速度,順利通過。
從以上的表現來看,它已經毫不遜色于市面上其他 NOA 產品。
但在體驗中間,我也發現了一些可以提升的地方:
例如 NOA 在將近退出時的語音提示不夠明顯;以及從 Pliot 功能退出,需要司機接管時,方向盤會有比較明顯的抖動,讓駕駛員「猝不及防」。
需要明確的是,我們這次體驗的高速 NOA 仍是內測版,后續計劃推送給車主的版本將會再進行優化和升級,到時候車主使用到的版本,將會更加「像人」。
而讓智能駕駛「更像人」并真正幫助人類司機解決駕駛場景,智己有自己一套方法。
02、D.L.P. 人工智能模型:IM AD「更像人」的秘密武器
在 IM AD DAY 上,智己汽車智能駕駛項目高級總監脫悅為我們介紹了智己 NOA 的能力。
要做一款懂消費者的高速 NOA 產品,智己先將高速場景的痛點研究明白了。
在高速 NOA 眾多頻發場景中,智己認為變道場景和擁堵場景是高速 NOA 的最亟需解決的痛點。
首先是變道場景。
在高速路上,空間狹小,前后車博弈時會隨時加減速。智己基于數據驅動的飛輪,車輛可以精準判斷各個目標物體的空間位置以及實時速度,實現以視覺為主的空間感知能力。
以距前車不超過 2m 時的變道場景為例,智己的實時空間感知能力,位置感知精度能達到 10cm 級別,速度感知精度達到10cm/s 級別。
據智己統計的數據顯示,智己高速 NOA 導航變道失敗率比頭部玩家低近一半。智己高速 NOA 變道失敗率為4%,頭部玩家為7.6%。
其次是擁堵場景。擁堵場景中,車流密度大,頻繁啟停,突發情況多,交互性強,要兼顧三大元素:安全,舒適,效率,才能算是「解決」擁堵場景。
在滿足以上元素的條件下,智己拋出了一個典型的擁堵場景:
講求安全:跟車距離盡量大,剎車反應要快;
講求舒適:不能有重剎,產生頓挫感;
講求效率:跟車距離就不能過大,以防連續被加塞。
通過龐大的感知訓練數據和大量的擁堵場景訓練樣本,智己希望高速 NOA 能夠實時感知空間,并且輕松應對擁堵路況,從而實現「更像人」的智能駕駛體驗。
據智己統計的在擁堵場景的志愿評測數據,智己的不舒適體感次數為每 21.6 分鐘一次,頭部玩家則是每 9.2 分鐘一次,智己的高速 NOA 舒適度是頭部玩家的 2 倍以上。
過去幾年間,行業頭部的智能駕駛玩家在感知智能技術路線方面逐步趨同,基于 BEV 和占用網絡(Occupancy Network)架構的感知算法成為主流技術路線。
車企包含蔚來、理想、小鵬,新興供應商包含百度 Apollo、華為、大疆、毫末智行、輕舟智航、小馬智行、元戎啟行等,都在自研智能駕駛中使用了 BEV 技術。
而溯源至 2021 年,智己已經率先在智能駕駛領域使用多傳感器多任務的 Transformer 模型、時序 BEV 機制實現 OneModel 落地量產。
而從智己統計的接管數據來看,決策規劃問題即認知智能導致的接管率,是由感知問題即感知智能導致的接管率的 10 倍。
這個洞察讓智己內部意識到,在持續提升感知智能的同時,認知智能已經成為智能駕駛技術演進的瓶頸。
在 IM AD DAY 上,智己宣布將數據驅動的決策規劃應用到量產,正式發布行業首個 D.L.P. 人工智能模型,著力解決認知智能的難題。
智能駕駛由感知、融合、預測、規劃、控制等組成。其中規劃是最需要攻克的一關,這也是提升認知智能的突破口。而 D.L.P. 人工智能模型的發布,正是為了解決數據驅動全流程中的規劃模塊。
目前,D.L.P. 人工智能模型已經在進行大規模的數據內測。基于 D.L.P. 的 IM AD 自動駕駛系統,將顯著提高復雜環境變化的預判能力,進而提前規劃智能駕駛行為,讓智己 IM AD 實現更像人的啟停、匯流,最終提高通勤效率。
據智己統計數據顯示,智己 NOA 的匝道通過率 95%,優于行業頭部玩家的 86%;變道成功率 97%,優于頭部玩家的92%;百公里誤制動 0.4 次,遠低于行業頭部玩家的1.4 次。
與此同時,智己正在開發的DDOD( Data Driven Object Detection) 模型和可替代高精地圖的 DDLD( Data Driven Landmark Detection) 模型,將大大提高智己 IM AD 感知的能力。
DDOD 模型中的 Occupancy 網絡算法,等同于特斯拉占用網絡和華為 GOD 網絡,可以對物理世界進行數據化建模,通過純視覺可以還原物理世界的真實場景。
DDLD 模型可對高精地圖進行替代,相比較傳統的感知算法,可以預測出一部分感知當前無法觀測到的路網信息。
在這兩個感知模型的加持下,再加上 D.L.P 人工智能模型對智己 IM AD 認知智能能力的增強,智己表示將在未來形成感知智能和認知智能的雙維提升。
03、「重地圖」方案和「重感知輕地圖」方案并行,城市 NOA 年內內測
IM AD DAY 上,除了 D.L.P 人工智能模型和高速 NOA 發布的重磅信息,智己還公布了智能駕駛時間線:
城市 NOA 領航輔助已開啟內測,預計 2023 年年內開啟公測;
可替代高精地圖的 DDLD 智能駕駛感知模型,預計 2023 年底開啟公測。
這也意味著,到今年年底,智己的輔助駕駛功能將覆蓋高速和城市路段,IM AD 將形成閉環。
今年車展期間的智能駕駛領域,最火熱的話題莫過于「去高精地圖」,各家車企和自動駕駛公司也紛紛秀肌肉。
問界宣布 M5 智駕版搭載華為 ADS 2.0 高階智能駕駛系統,不再依賴高精地圖,而是通過雷達、攝像頭等融合感知,識別異形障礙物;
理想最新發布的AD Max 3.0,按照官方說法,它可以擺脫對高精地圖的依賴,像人類司機一樣實時感知、決策、規劃;
百度推出的城市智駕 Apollo City Driving Max 系統,選擇以「純視覺+激光雷達」的方式實現感知冗余,比行業通用的傳統高精地圖要「輕」近 80%。
元戎啟行發布 Driver 3.0 系統,無需高精地圖,以更低的硬件成本就能實現城市內點到點智能駕駛。
而劉濤表示,在一段時間內,智己仍將并行采用「重地圖」方案和「重感知輕地圖」方案實現 NOA 功能。
智己認為,高速場景的高精地圖已經有 5 年以上的開發時間,和城市場景經常修路改道相比可以保證「鮮度」,因此在高速場景選擇繼續使用高精地圖方案。
而城市場景,則使用「重感知輕地圖」方案。基于 Occupancy 占用網絡模型的 DDOD 以及經過高精地圖訓練的 DDLD 兩種感知模型,可以對路面以及懸掛物進行精準感知,以規劃自車的行駛軌跡。
另一方面,智己也正在開發輕量化的地圖方案,通過感知的方式獲取遠距離、高精度的實時道路環境模型。
「我們做過 5000 公里以上的對標,通過大數據對標來看,我們的成功率達到 95% 以上,目前百公里接管率可以達到一次以下。」劉濤自信地表示。
他預測,基于網絡模型的不斷迭代,百公里接管率會以兩年為周期提升十倍。預計到 2025 年,接管率就能從每百公里接管一次,到每萬公里接管一次。
而將目光放到當下,當各家城市 NOA 功能逐漸一致,比起如何落地,智己更關注駕駛者體驗。
智己認為,智能駕駛最終極目標一定是安全的、舒適的體驗,讓人在最放松的狀態下,從 A 點到 B 點。
要實現這個終極目標,一方面,要通過智能駕駛底層技術、邏輯來演變,深挖技術的更多可能性;另一方面,需要通過技術呈現出來讓用戶感知到穩定的體驗,又可以在真正的使用場景下讓用戶感到驚艷。
這可能也是智己 NOA 相較于其他 NOA 方案「姍姍來遲」的原因。
溯源至 2014 年,上汽前瞻工程團隊已著手智能駕駛領域的相關研究,在規控與執行器協同處理方面獲得了豐厚技術積累。
2017 年成立上汽人工智能實驗室,開啟在深度學習領域的全面布局。
2020 年,L 項目組(智己汽車)與 Momenta 建立在智能駕駛領域的深度戰略合作關系。
2021 年,智己汽車率先在智能駕駛領域使用多傳感器多任務的 Transformer 模型、時序 BEV 機制實現 OneModel 落地量產。
因此,我們看到 IM AD 的表現都是「有跡可循」的。對于智己而言,這不單單是 NOA 功能的上線,更是歷經數年沉淀的成果。
相信今年即將開始公測的城市 NOA,會給我們更多驚喜。
來源:第一電動網
作者:汽車之心
本文地址:http://m.155ck.com/kol/201528
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!










 京公網安備
11010502033163號
京公網安備
11010502033163號