雖然圣誕假期就要來臨,但自動駕駛行業依然「熱火朝天」。
近日,來自美國的自動駕駛公司 May Mobility 就成功敲定了價值 5000 萬美元的 B 輪融資,金主是超級巨頭——豐田。
豐田注入的這筆資金將主要用于公司擴張,比如新增穿梭車,招聘工程和運營人員等。

眼下,May Mobility 已經在三個美國城市(底特律、普羅維登斯和大溪城)部署了自動駕駛穿梭服務,其車隊由 25 輛低速穿梭車組成。
不到一年前,May Mobility 還成功拿到 2200 萬美元的 A 輪融資。
展望未來,May Mobility 希望將三個城市的穿梭車保有量都增加到 25 臺。這樣的車隊體量不但能幫公司帶來更多營收,還能從真正意義上影響所在城市的交通。
對 May Mobility 來說,這次融資的意義可不只是充實了錢袋子,這家成軍于 2017 年的公司終于拉來了豐田這個超級巨頭的背書。
據悉,豐田已經將 May Mobility 列入了公司「未來開放平臺自動駕駛供應商」大名單。
雖然豐田與 May Mobility 均未分享雙方合作的相關細節,不過業內人士認為,日本巨頭是在為自家的 e-Palette 平臺(在 2018 年 CES 上亮相)發掘自動駕駛解決方案。
雖然沒有 Aurora 名頭大,但 May Mobility 也是一家「三巨頭」公司,其聯合創始人包括:Alisyn Malek(任新公司 COO),Edwin Olson(任新公司 CEO)和 Steve Vozar(任新公司 CTO)。

作為公司 CEO,Edwin Olson 已在自動駕駛行業深耕十余年。
在密歇根大學做助理教授時,他就參與了 2007 年的 DARPA 城市挑戰賽,隨后還相繼出任福特自動駕駛項目首席研究員與豐田研究員自動駕駛研發副總監。他甚至總結出了一套適用于自動駕駛的摩爾定律。
接下來,我們就跟隨 Olson 的文章漲漲知識,看看到底何謂自動駕駛摩爾定律。
Edwin Olson 的自動駕駛摩爾定律
作為一家自動駕駛公司的 CEO,我時常會問自己,到底什么時候自動駕駛出租車才能成為主流?
從行業來看,大家對這個問題的認知差別巨大,擅長做買賣的某家公司給出了 2019 年的節點,而工程師則認為還相當遠,那我們到底該聽誰的?
在下文中,我們會以接管率為基礎來衡量自動駕駛系統的性能。
這里所謂的接管率,其實指的是安全駕駛員介入的頻率,同樣的行駛里程,接管的頻率越低,自動駕駛系統性能當然就越強。
摩爾定律?
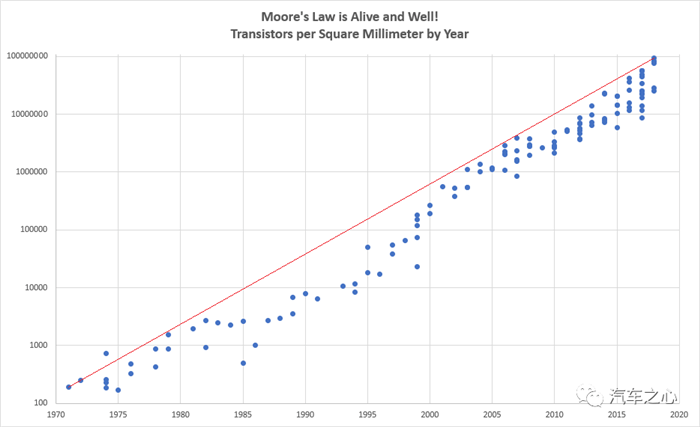
英特爾創始人 Gordon Moore 提出「摩爾定律」這一概念揭示了信息技術進步的速度,即當價格不變時,集成電路上可容納的元器件數目,每隔 18 個月便會增加一倍,性能也將提升一倍。
換言之,每一美元能買到的電腦性能,每隔 18 個月就會翻一倍。
這樣指數級的增長也意味著,現在的智能手機已經可以碾壓曾經的超級電腦。
當然,指數級增長并不多見。
就拿樹木和人來說,其增長都是線性的,因此要慢上不少。
大多數指數級增長的事物勢頭都不夠長久,細菌增殖就是最好的例子,一旦它們的生存空間變擁擠,指數級的增長就會暫停。
事實上,當下的計算機性能提升也快滿足不了摩爾定律了。
也就是說,剛剛冒頭的技術如果出現指數級增長并不稀罕。雖然這是個較為樂觀的假設,但卻非常符合那些要用技術改變世界人的期盼。
所以今天我們干脆暢所欲言,大膽假設,看看自動駕駛汽車的未來到底會是一幅什么樣的圖景。
在這里,我們就假設自動駕駛技術會迎來指數級增長。
換句話來說,本文要編織出自動駕駛界的摩爾定律。不過,這個結果可能并非如你所愿。
數據
2004 年時,世界上最好的自動駕駛汽車肯定是卡耐基梅隆的「沙暴」,那輛車在首屆 DARPA 自動駕駛挑戰賽「拔得頭籌),雖然 150 英里的賽程它只跑了 7.4 英里。
這里可完全沒有嘲笑「沙暴」的意思,畢竟那個年代其它車型表現更差。
總結來說,2004 年時,自動駕駛汽車的接管率約為 10 英里/次。
14 年后,Waymo 將接管率提升到了 11017 英里/次(104),這絕對是指數級提升。
有了這兩個數據,我們就能計算出自動駕駛汽車的摩爾定律,即兩次接管之間的行駛里程大約每 16 個月會翻番。
有沒有發現什么?
自動駕駛汽車的摩爾定律跟計算機行業幾乎一樣——性能每 16 個月翻一番。
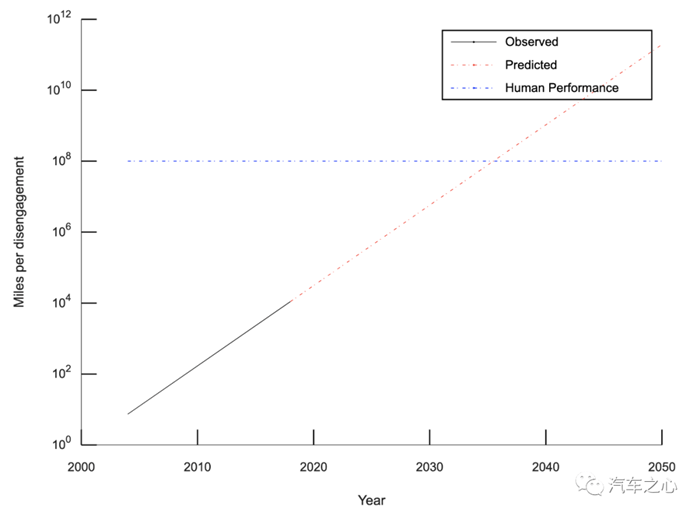
上圖中的黑線代表自動駕駛汽車 2004-2018 年間的發展腳步。
如果繼續外推(紅色線),總會有一天與指代人類駕駛能力的藍色線相交。
需要注意的是,這里的 Y 軸用了對數標尺,因此指數級增長看起來就像一條直線。
這里的關鍵問題在于:「自動駕駛系統到底要好到什么程度才行?」
假設我們的目標是與人類的駕駛能力相匹敵,那么就得達到每 1 億英里(10?)才出現一次事故的概率。
是不是覺得有點抽象?
其實解釋一下你就明白,普通人這一輩子可能也就駕駛數十萬英里的車。
至于自動駕駛汽車,自誕生以來,所有廠商測試車的累積里程恐怕也不會超過 2000 萬英里。
這一對比,你就會發現,人類現在確實強大得多,畢竟 10? 和 10? 之間差了 10000 倍。換句話來說,現在自動駕駛汽車的火候只有人類駕駛員的 0.01%。
即使每 16 個月性能翻番的勢頭能一直維持下去,想和人類駕駛水平相當,也得再修煉 16 年(2035 年)。
顯然,那些號稱「今年或明年就實現自動駕駛」這種說法并不準確。
盡管各家廠商還是會高調展示自己的最新技術,但這并不意味著他們的系統已經能與人類駕駛員匹敵。
當然,大多數自動駕駛故障都不會致命,而限定條件換成僅使人受傷后,人類的安全駕駛里程也能達到 10? 英里。
所以,如果自動駕駛汽車的故障不會致命,這些公司就能提前四年拿到人類司機的駕照。不過,我們還是要等到 2031 年。
自動駕駛的進化軌跡
May Mobility 就在研發自動駕駛汽車,而且我們的產品已經上路運營了。
你可能會說,這不離 2035 年遠著,你是怎么做到的?
主要原因有二:
May Mobility 沒想著在所有場景與人類駕駛員較勁,我們專注的只是全部駕駛任務中的一個小小子集,即固定線路上的低速(< 25>
更簡單的路線加上較低的速度就意味著整體復雜度的大幅降低。
從基礎來看,May Mobility 使用了不同的技術,它能幫助車輛理解其他車輛和行人到底在做什么。
我們相信這一技術(多策略決策技術)能讓 May Mobility 走出一條與眾不同的路子,同時為整個行業帶來變革性的影響。
這樣的變革可是有先例的。2011 年時如果你想給某人做個完整的 DNA 測序,得花上 1 億美元,
但在隨后的幾年里,這項技術的進步開始遵循摩爾定律,性能每 20 個月就翻一番。
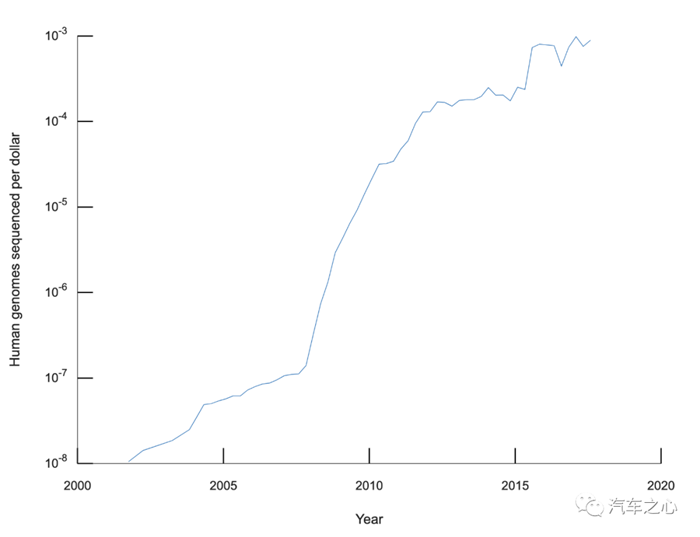
從上圖可知,2001-2007 年間 DNA 測序技術的發展遵循了摩爾定律,這段時間出現了較為穩定的指數級增長速度。
但到了 2008 年,基因測序迎來了全新技術,它徹底改變了基因測序的摩爾定律「系數」,進步曲線變得更陡了。原來 20 個月才能翻一番的性能,現在 4 個月就完成了。
這次技術進步簡直讓我們坐上了火箭,離 1000 美元搞定基因測序的目標一下近了幾十年。
我們相信,類似的神來之筆未來也會發生在自動駕駛領域,而在 May Mobility 看來,這個革命性的新技術就是自家的多策略決策技術。
要點總結:
1. 自動駕駛汽車性能每 16 個月翻一番,這就是它的摩爾定律。
2. 鑒于自動駕駛汽車的火候只有人類駕駛員的 0.01%,在 2035 年之前,談自動駕駛出租車落地都是白日夢。
3. 自動駕駛汽車的摩爾定律也有兩個漏洞;其一是革命性技術可能會大大改變增長曲線;其二是一些公司可能會放棄「全知全能」的全天候自動駕駛,轉而選擇更為簡單的應用領域。
4. 自動駕駛摩爾定律會讓自動駕駛出租車公司落淚,但對穿梭車公司來說絕對是利好。
如果上述粗略描述沒有看夠,以下三個要點一定不能錯過。
要點 1:
自動駕駛汽車的摩爾定律取決于我們使用的數據。如果你認為自動駕駛公司高估了自己的技術水準,那么自動駕駛出租車部署的時間線還得再次推后。
另一方面,如果你相信如今最好的自動駕駛汽車比 Waymo 公布的數字還要強十倍(即每 11 萬英里接管一次),那么不用等到 2035 年我們就能看到滿地跑的自動駕駛出租車。
不過即使現在的自動駕駛系統有這個水平,也只不過能將 2035 年這個時間節點提早 7 年罷了。
要點 2:
上文有一個關鍵假設,即技術會以指數級速度進化。
只有這樣,自動駕駛系統的性能才能每 16 個月翻一番。不過,這里選取的兩個時間節點都非常完美,2004 年是一個低谷,而 2018 年是個高峰,這樣才能得出現在的進化速度。
如果放到一個較短的時間維度中進行對比,自動駕駛還能進行指數級進化嗎?其速度比 16 個月翻一番快還是慢?
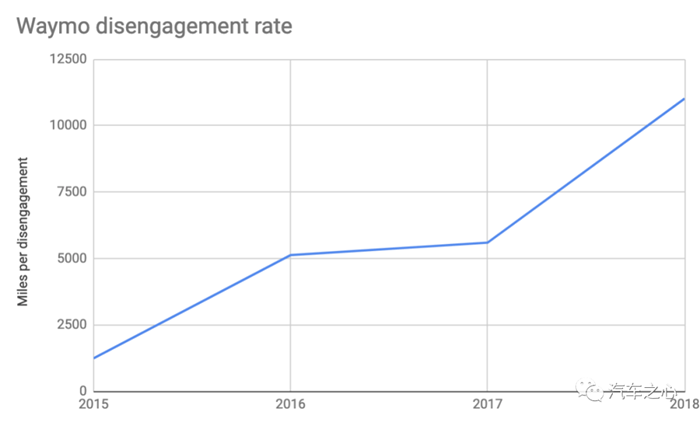
拿 Waymo 來說,它每年才提供一次數據,而且能找到有價值數據的只有 4 年。
需要注意的是,上圖用的并非對數標尺,因此如果進化速度是指數級的,曲線上揚的角度應該要陡上不少。
從圖中藍線可知,2017-2018 這一年 Waymo 自動駕駛系統性能成功翻番,但 2016-2017 年它的進步卻相對平緩(2015-2016 年也進步神速)。
這又意味著什么?
我們也拿指數擬合公式進行計算,結果發現性能確實還是 16 個月翻一番。
不過,擬合度看起來很差勁。如果要實現完全的線性擬合,恐怕自動駕駛出租車大規模部署要 2 萬年。
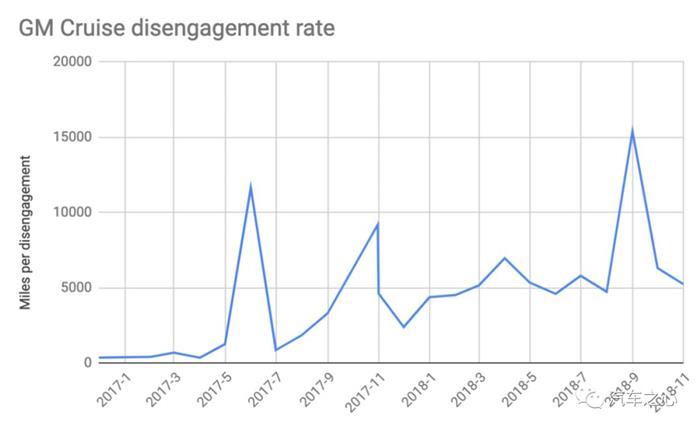
Cruise 每月公布的數據也是一路上揚,不過其走勢有點混亂。如果使用相同的擬合公式,你會發現 Cruise 的自動駕駛系統性能每 18 個月才能翻一番。
從這個角度來看,你就會意識到,大家的軌跡其實差不多,因此 2035 年可能還真是個比較實際的時間點。
當然,要點 3 除外。
要點 3:
接管率,這個定義來自加州車管所(DMV),它排除了許多類型的干預,因此這個數據多少有些「通貨膨脹」。
換句話來說,這所謂的接管率反映出的其實是各家公司想要的數據,因為他們只會做自己擅長的部分。
你也可以說,在不太擅長的情況下系統當然會表現不佳。
不過,如果問題改成「我們離能適能任何環境的自動駕駛出租車還有多遠」的話,那些自動駕駛公司不想考慮的情況就會成為徹徹底底的絆腳石。
在 2016 年的信息披露中,Waymo 就給出了一個經典的總結:
DMV 對接管的定義為兩種情況下的自動駕駛模式失效:
(1)「當檢測到自動駕駛技術故障時」或者(2)「當車輛安全運行需要安全駕駛員關掉自動駕駛模式,立即手動控制車輛時。」
在制定該定義時,DMV 強調:「這種澄清是必要的,以確保制造商不會上報每一個常見或常規的接管。」
作為測試的一部分,我們的車輛每天會多次開啟或關閉自動駕駛模式。每年介入都會發生數千次,但大多數都是常規問題,與安全無關。
安全是我們的第一要務,Waymo 的安全駕駛員都經過嚴格訓練,會在很多情況下對車輛進行手動控制,而非僅在安全運行需要他們這樣做時。
來源:蓋世汽車
本文地址:http://m.155ck.com/news/jishu/106490
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號