蓋世汽車訊 據外媒報道,為了確保各種安全關鍵系統可以安全運行,并根據需要工作,密歇根州立大學(Michigan State University)的研究人員開發出一種方法,可為在未知環境中運行的系統設計具有學習能力的安全控制器。
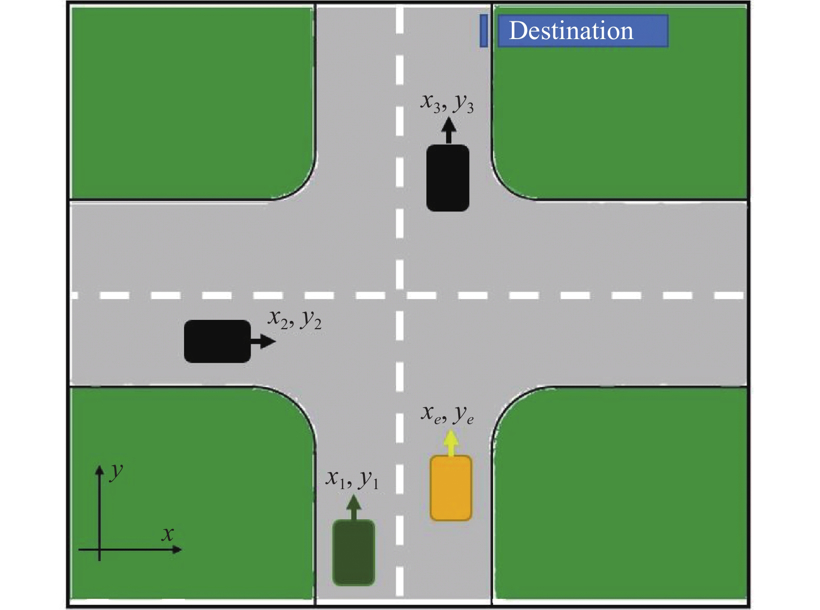
圖片來源:IEEE/CAA Journal of Automatica Sinica
此項研究由密歇根州立大學的Bahare Kiumarsi和Zahra Marvi聯合展開,重點關注自動駕駛汽車在市區的安全操作。
隨著時間的發展,科學家們已經成功設計出基于控制屏障功能(CBF)的安全控制方法,可以在很多領域應用,包括自適應巡航控制、機器人安全控制和無碰撞多智能體系統。這些方法通常可結合CBF和Lyapunov函數來證明控制器的安全性和穩定性。而密歇根州立大學的研究人員提出新穎的支持學習的歸零控制屏障功能(ZCBF),能夠在學習的同時安全操作,即使環境中存在未知的動態。
隨著越來越多的安全關鍵系統部署在現實世界中,科學家們必須能夠確保這些系統時刻保證安全。環境中的不確定因素會影響系統的安全運行。當在城市環境中研究自動駕駛汽車時,研究人員必須考慮這些不確定因素。例如,自動駕駛汽車、半自動駕駛汽車、人類駕駛汽車和行人會出現在同一區域內。
因此,科學家們必須設計一種控制器,以確保系統安全運行,盡管在同一空間中導航的其他車輛和人類的行為方式存在不確定性。科學家們需要能夠依靠系統的安全性,同時還要讓系統盡可能地運行。密歇根州立大學研究人員的方法解決了如何為必須在不確定環境中運行的系統設計具有學習能力的安全控制器的問題。 其新穎的學習方法能夠保證自動駕駛汽車的安全,即使在與道路上其他車輛的不確定行為一起運行時也是如此。
現有的安全控制方法要求科學家對安全集有完整的了解。在環境存在不確定性的情況下,為系統設計安全控制變得更具挑戰性。這些安全關鍵系統必須能夠快速了解不確定性,同時實現最大的安全性能。緩慢的模型學習方法可以提供所需的安全功能,但無法達到預期的性能。基于最小化建模誤差的簡單模型學習方法也無法達到所需的安全要求,即使預期的估計誤差會隨著時間的推移而減少。博士候選人Zahra Marvi表示:“需要新的學習算法來盡可能避免對安全集的誤傳。”研究人員開發的方法能夠快速了解環境中的不確定性并迅速實現安全性能。
助理教授Bahare Kiumarsi表示:“滿足安全約束至關重要,在控制設計階段就需要考慮到,否則會引發嚴重后果。通過使用密歇根州立大學研究人員設計的這種方法,系統中的控制器可以采取更少的保守動作,從而獲得更好的性能,進而提高系統的安全性和性能。

來源:蓋世汽車
作者:劉麗婷
本文地址:http://m.155ck.com/news/jishu/173549
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號