停在前面的并不是一輛真車(chē),是一輛「氣球車(chē)」,這是人們給 AEB(自動(dòng)緊急制動(dòng)功能)測(cè)試道具起的昵稱。
雖然整體上看來(lái)就是一個(gè)偽裝成汽車(chē)后部的充氣方塊,但是在其中卻另有乾坤。在它內(nèi)部中間位置有一個(gè)三角錐,上下各有一片鋁板,甚至外面包裹的材料也有要求:它們必須是吸波材料,這樣才能確保后方的汽車(chē)可以把它識(shí)別為「一輛車(chē)」,而不是掛在氣球車(chē)前方的一塊鐵板。
 ? ? ? ? ?可被車(chē)輛識(shí)別的「氣球車(chē)」 | 現(xiàn)場(chǎng)拍攝
? ? ? ? ?可被車(chē)輛識(shí)別的「氣球車(chē)」 | 現(xiàn)場(chǎng)拍攝
當(dāng)極客公園(ID:geekprk)乘坐的奇瑞瑞虎 8 以 40km/h 的速度向前行駛時(shí),距離氣球車(chē)還有約 2 米的時(shí)候,車(chē)輛內(nèi)部發(fā)出「嘀嘀嘀」的警報(bào)聲,并且采取了緊急制動(dòng)措施,最終在距離氣球車(chē)約 50cm 時(shí)停下來(lái)。
 車(chē)輛在氣球車(chē)面前自動(dòng)停下來(lái) | 現(xiàn)場(chǎng)拍攝
車(chē)輛在氣球車(chē)面前自動(dòng)停下來(lái) | 現(xiàn)場(chǎng)拍攝
車(chē)對(duì)車(chē)的 AEB 完整測(cè)試過(guò)程就是這樣。作為 L2 級(jí)別自動(dòng)輔助駕駛系統(tǒng)當(dāng)中非常重要的一項(xiàng)功能,因?yàn)樗鼙WC主動(dòng)安全性,在符合條件的情況下,司機(jī)面對(duì)危機(jī)狀況并未采取任何措施,機(jī)器可自主做出應(yīng)急舉動(dòng)。也正因如此,AEB 甚至被一些人稱為「輔助駕駛之光」。
AEB 到底能不能配得上這項(xiàng)稱號(hào)呢?
AEB 的上級(jí)——PEBS
要問(wèn)是不是,先看為什么。要說(shuō)今天的主角 AEB,還要從 PEBS 談起。
Predictive Emergency Brking System,預(yù)測(cè)性緊急制動(dòng)(輔助)系統(tǒng),簡(jiǎn)稱 PEBS,屬于 L2 級(jí)別自動(dòng)輔助駕駛系統(tǒng)的主動(dòng)安全系統(tǒng)。你可以把它看作各個(gè)安全功能的集合,包括 PCW(預(yù)測(cè)性碰撞報(bào)警)、AEB(自動(dòng)緊急制動(dòng)),以及 EBA(緊急制動(dòng)輔助)。
當(dāng)車(chē)輛有潛在危險(xiǎn)的可能時(shí),就是 PEBS 放開(kāi)手腳的時(shí)候。不過(guò),對(duì)于「潛在危險(xiǎn)」的判斷標(biāo)準(zhǔn),則要由機(jī)器自己來(lái)判斷。以 L2 級(jí)別自動(dòng)輔助駕駛系統(tǒng)供應(yīng)商博世的說(shuō)法,機(jī)器判斷潛在危險(xiǎn)大致有 4 個(gè)階段,比如距離相對(duì)較遠(yuǎn)速度卻比較快的時(shí)候,車(chē)輛會(huì)發(fā)出聲音警告,同時(shí)制動(dòng)系統(tǒng)預(yù)充壓;當(dāng)與前車(chē)距離較近,隨時(shí)可能撞上時(shí),系統(tǒng)會(huì)自動(dòng)采取緊急制動(dòng),如果配備安全帶收緊功能也會(huì)使用。
當(dāng)然,這只是大致的標(biāo)準(zhǔn),在實(shí)際情況當(dāng)中,機(jī)器的判斷會(huì)因各種因素的不同而改變,如本車(chē)與前方車(chē)輛行駛的速度,司機(jī)是否采取相應(yīng)措施等等,傳感器可以自行判斷需不需要,以及采取何種方式提醒駕駛員。
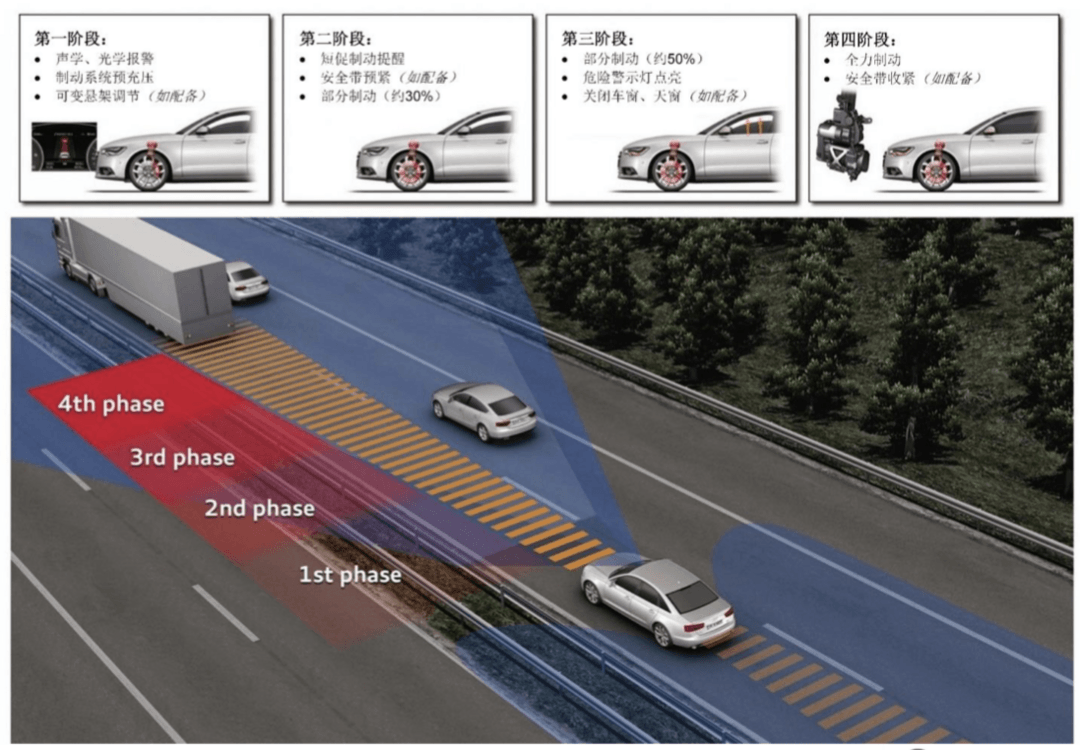 、
AEB 功能觸發(fā)的幾個(gè)階段 | 博世
、
AEB 功能觸發(fā)的幾個(gè)階段 | 博世
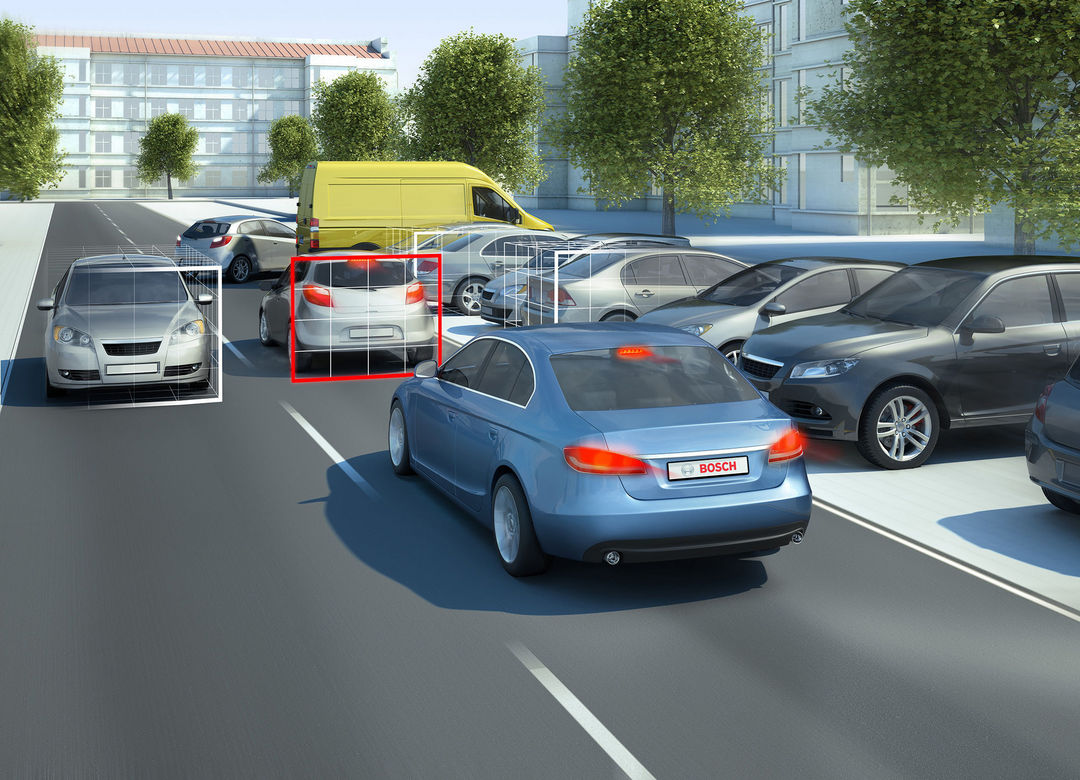
在設(shè)備方面,L2 級(jí)別自動(dòng)輔助駕駛系統(tǒng)需要車(chē)輛前方的毫米波雷達(dá)與攝像頭來(lái)實(shí)現(xiàn)預(yù)測(cè)性緊急制動(dòng)功能。
毫米波雷達(dá)的工作原理也容易理解。簡(jiǎn)單來(lái)說(shuō),雷達(dá)會(huì)捕捉到目標(biāo)物體的電磁波,將其處理為信號(hào),再通過(guò)算法呈現(xiàn)為圖,使機(jī)器描繪出物體的形狀,方便之后進(jìn)行各式各樣的功能操作。
攝像頭就更加容易理解,由于雷達(dá)收到的信息并不能完全幫助機(jī)器「認(rèn)識(shí)」目標(biāo)物體,而攝像頭采集到圖像之后,通過(guò)內(nèi)置在攝像頭中圖像信息處理單元(ISP)對(duì)圖像進(jìn)行分析,從而實(shí)現(xiàn)對(duì)畫(huà)面中的車(chē)輛及其燈光、行人、車(chē)道線等目標(biāo)的探測(cè)。攝像頭又分單目,雙目等,現(xiàn)階段,大多數(shù) L2 級(jí)別自動(dòng)輔助駕駛系統(tǒng)還是以毫米波雷達(dá)+單目攝像頭的方式完成,這里不再贅述。
 ? ? ? ? ?通過(guò)車(chē)身的傳感器與攝像頭可以達(dá)到 L2 級(jí)別的自動(dòng)輔助駕駛系統(tǒng) | 博世
? ? ? ? ?通過(guò)車(chē)身的傳感器與攝像頭可以達(dá)到 L2 級(jí)別的自動(dòng)輔助駕駛系統(tǒng) | 博世
博世方面透露,其 L2 自動(dòng)輔助駕駛系統(tǒng)也正在逐步搭載到整車(chē)。威馬 EX5、名爵 ZS,吉利博瑞等車(chē)型均有搭載,2019 年,博世預(yù)計(jì)在中國(guó)落地 40 款車(chē)型,目前已有數(shù)十款車(chē)型搭載,具體數(shù)字博世方面則并未說(shuō)明。
因?yàn)楹撩撞ɡ走_(dá)與攝像頭都具有獨(dú)特的優(yōu)劣勢(shì),二者需要互補(bǔ),共同增加系統(tǒng)的安全系數(shù),后面會(huì)分別詳細(xì)講解。值得說(shuō)明的是,要把這兩個(gè)性質(zhì)完全不同的傳感器組合在一起,可不是 1+1=2 這么簡(jiǎn)單的事。
什么是輔助駕駛的關(guān)鍵點(diǎn)?
與氣球車(chē)測(cè)試不同的是,針對(duì)行人橫穿的 AEB 功能測(cè)試看起來(lái)要更加復(fù)雜一些。
在低速駕駛的情況下(時(shí)速約 30km/h),汽車(chē)駕駛道上一個(gè)仿真人從車(chē)輛前方經(jīng)過(guò),同樣,在即將撞上的時(shí)候車(chē)輛一個(gè)急剎,在行人經(jīng)過(guò)時(shí)停穩(wěn),此時(shí)人與車(chē)之間的距離大約只有 20cm。
盡管距離非常近,車(chē)輛在 AEB 測(cè)試方面還是很好地完成了任務(wù)。如果說(shuō)困難程度的話,前方行人的檢測(cè)要比前方車(chē)輛的檢測(cè)更考驗(yàn)輔助駕駛系統(tǒng)的反應(yīng)能力。
 針對(duì)行人橫穿的 AEB 功能測(cè)試 | 現(xiàn)場(chǎng)拍攝
針對(duì)行人橫穿的 AEB 功能測(cè)試 | 現(xiàn)場(chǎng)拍攝
為什么會(huì)是這樣的結(jié)果?如果在真實(shí)的場(chǎng)景下,行人的安全還可以保證嗎?
人類的體積比汽車(chē)要小很多,這是肉眼可見(jiàn)的事實(shí)。對(duì)于毫米波雷達(dá)的探測(cè)來(lái)講,人類對(duì)雷達(dá)的反射強(qiáng)度也要弱許多。這就使毫米波雷達(dá)對(duì)前方行人的探測(cè)造成一定的困難。
博世底盤(pán)控制系統(tǒng)中國(guó)區(qū)駕駛員輔助系統(tǒng)業(yè)務(wù)單元工程部門(mén)經(jīng)理杜宇告訴包括極客公園在內(nèi)的媒體,毫米波雷達(dá)的優(yōu)點(diǎn)在于對(duì)前方物體探測(cè)時(shí),對(duì)于其在縱向方向上的相對(duì)速度、距離等屬性探測(cè)非常精準(zhǔn)。而攝像頭在判斷物體的特征,如是什么類型的物體上,有先天的優(yōu)勢(shì),同時(shí)基于視覺(jué)的算法對(duì)于物體在橫向方向上的位移判斷又相對(duì)雷達(dá)來(lái)說(shuō)更加精準(zhǔn)。
通過(guò)雙重判定,系統(tǒng)才可以確定前方的路況,進(jìn)而決定用不用執(zhí)行其他操作,這就是所謂的「數(shù)據(jù)融合」,輔助駕駛系統(tǒng)的關(guān)鍵點(diǎn)。在打造系統(tǒng)的時(shí)候,二者的數(shù)據(jù)融合基本上是必須考慮的事情。
 ? ? ? ? ?針對(duì)行人騎自行車(chē)的場(chǎng)景進(jìn)行 AEB 功能測(cè)試 | 博世
? ? ? ? ?針對(duì)行人騎自行車(chē)的場(chǎng)景進(jìn)行 AEB 功能測(cè)試 | 博世
就像上文說(shuō)到的,這是個(gè) 1+1>2 的結(jié)果。更重要的是,數(shù)據(jù)融合會(huì)增加探測(cè)目標(biāo)存在概率的可信度。數(shù)據(jù)融合將不同類型傳感器所探測(cè)到同一個(gè)屬性目標(biāo)的存在概率進(jìn)行疊加。尤其在某一種傳感器受內(nèi)部或外部因素影響,如攝像頭受強(qiáng)光、極端天氣等影響時(shí),可避免因其而帶來(lái)的系統(tǒng)性能降低,保證系統(tǒng)可靠的運(yùn)行。
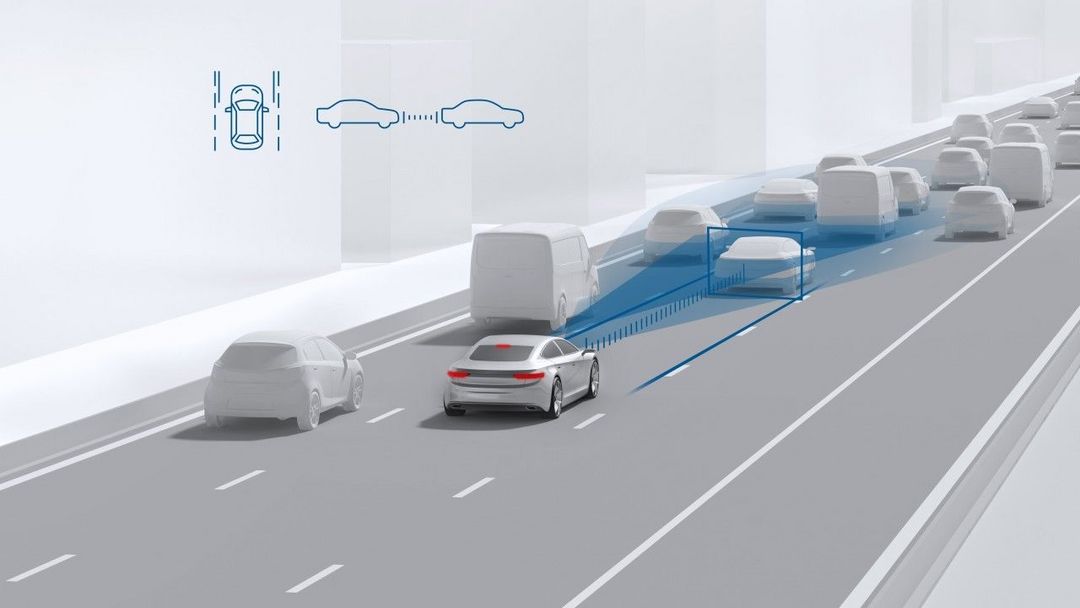
在 L2 級(jí)別自動(dòng)輔助駕駛系統(tǒng)當(dāng)中,數(shù)據(jù)融合的例子隨處可見(jiàn)。如通過(guò)雷達(dá)與攝像頭的融合,可以實(shí)現(xiàn) L2 級(jí)別自動(dòng)輔助駕駛的交通擁堵輔助及智能巡航輔助功能。通過(guò)引入更多的傳感器(如四個(gè)角雷達(dá))還可實(shí)現(xiàn)在駕駛員監(jiān)控下的自動(dòng)變道。
 ? ? ? ? ?駕駛員輔助系統(tǒng)當(dāng)中,數(shù)據(jù)融合是關(guān)鍵點(diǎn) | 博世
? ? ? ? ?駕駛員輔助系統(tǒng)當(dāng)中,數(shù)據(jù)融合是關(guān)鍵點(diǎn) | 博世
回到開(kāi)頭的話題,車(chē)對(duì)行人的 AEB 功能能不能避免車(chē)禍的發(fā)生?
答案是否定的。在國(guó)際最為嚴(yán)格的歐洲新車(chē)安全測(cè)試體系 Euro NCAP 當(dāng)中明確給 AEB 功能下了定義:車(chē)輛在探測(cè)到極有可能發(fā)生碰撞時(shí)所自動(dòng)施加的制動(dòng),用以降低車(chē)輛的速度并盡可能的避免碰撞的發(fā)生。
降低車(chē)輛速度,而不是讓車(chē)輛停下來(lái);「盡可能避免」,而不是完全避免。這些字眼都表明一件事,機(jī)器在目前的確無(wú)法替代人類。
測(cè)試現(xiàn)場(chǎng)的工作人員告訴極客公園,一般來(lái)說(shuō)在檢測(cè)到行人并觸發(fā) AEB 功能時(shí),車(chē)輛將時(shí)速降低 40km/h 是比較符合標(biāo)準(zhǔn)的,假如車(chē)輛以 60km/ h 的速度行駛,觸發(fā) AEB 功能后短時(shí)間內(nèi)降到 20km/h,就能算得上合格。
另外一點(diǎn),即便是觸發(fā) AEB 功能,也需要一定的條件。
和電腦手機(jī)一樣,如果我們要在設(shè)備上達(dá)到某種目的,就必須要觸發(fā)那個(gè)達(dá)到目的的條件。在汽車(chē)上也一樣,即便設(shè)備擁有人工智能,即便它的探測(cè)距離可以達(dá)到前方幾百米,但 AEB 功能的觸發(fā)條件也有著諸多限制。
 ? ? ? ? ?即便是主動(dòng)安全功能,也存在許多限制 | 博世
? ? ? ? ?即便是主動(dòng)安全功能,也存在許多限制 | 博世
現(xiàn)場(chǎng)的工作人員告訴極客公園,車(chē)輛在時(shí)速 4km/h 以上才可以開(kāi)啟 AEB 功能,如果在該時(shí)速之下,傳感器的判斷是不精準(zhǔn)的,因此默認(rèn)不開(kāi)啟;遭遇前方車(chē)輛緊急制動(dòng)從而啟動(dòng) AEB 功能后 2 秒鐘,如果司機(jī)依然沒(méi)有作為的話,車(chē)輛會(huì)重新啟動(dòng)進(jìn)行怠速行駛,因?yàn)檐?chē)輛靜止后主動(dòng)安全功能也就停止運(yùn)行,不存在 AEB 功能;車(chē)輛需要在行駛平穩(wěn)時(shí) AEB 功能才大概率會(huì)開(kāi)啟,如果司機(jī)不斷調(diào)整方向,或者行駛速度非常不均,機(jī)器就沒(méi)有辦法工作……類似的限制條件還有很多。
2019 年 9 月,美國(guó)汽車(chē)協(xié)會(huì)(AAA)針對(duì) AEB 和行人檢測(cè)警告兩個(gè)功能進(jìn)行了一系列測(cè)試。結(jié)果顯示,這些號(hào)稱可以檢測(cè)到行人并自動(dòng)剎車(chē)的系統(tǒng),還遠(yuǎn)未達(dá)標(biāo)。在低速駕駛的情況下(時(shí)速約 32km/h),四款搭載 L2 級(jí)別自動(dòng)輔助駕駛系統(tǒng)的車(chē)輛僅有 40% 的概率可以避免碰撞,如果速度提高,或者把行人換成小孩,發(fā)生事故的概率大大增加。(詳情可見(jiàn)極客公園之前的報(bào)道:直到今天,我們?nèi)匀粺o(wú)法信任輔助駕駛)
 四款車(chē)在測(cè)試自動(dòng)緊急制動(dòng)系統(tǒng) | 美國(guó)汽車(chē)協(xié)會(huì)
四款車(chē)在測(cè)試自動(dòng)緊急制動(dòng)系統(tǒng) | 美國(guó)汽車(chē)協(xié)會(huì)
可想而知,認(rèn)準(zhǔn)僅僅擁有自動(dòng)剎車(chē)輔助(AEB)的 L2 級(jí)別自動(dòng)輔助駕駛系統(tǒng)的人們敢在道路上撒開(kāi)方向盤(pán),用一瓶水來(lái)蒙騙機(jī)器,是多么危險(xiǎn)的事情。對(duì)于車(chē)企或者供應(yīng)商來(lái)說(shuō),在保證安全的同時(shí),也必須兼顧駕駛體驗(yàn)。而對(duì)于消費(fèi)者,認(rèn)清現(xiàn)實(shí)情況,是對(duì)個(gè)人安全最大的負(fù)責(zé)。
責(zé)任編輯:王訓(xùn)魁
來(lái)源:極客公園
本文地址:http://m.155ck.com/news/shichang/104758
以上內(nèi)容轉(zhuǎn)載自極客公園,目的在于傳播更多信息,如有侵僅請(qǐng)聯(lián)系admin#d1ev.com(#替換成@)刪除,轉(zhuǎn)載內(nèi)容并不代表第一電動(dòng)網(wǎng)(m.155ck.com)立場(chǎng)。
文中圖片源自互聯(lián)網(wǎng),如有侵權(quán)請(qǐng)聯(lián)系admin#d1ev.com(#替換成@)刪除。




先估價(jià)再買(mǎi)車(chē),買(mǎi)的放心開(kāi)的安心
您的詢價(jià)信息
已經(jīng)成功提交我們稍后會(huì)聯(lián)系您進(jìn)行報(bào)價(jià)!

 京公網(wǎng)安備
11010502033163號(hào)
京公網(wǎng)安備
11010502033163號(hào)