蓋世汽車訊 據外媒報道,東京大學(the University of Tokyo)JSK實驗室的研究團隊成功開發了兩個肌肉電機,并將其整合到一個單一模塊內,通過共享部件實現了空間效率的最大化。該模塊同時扮演了骨骼結構的角色。此外,該團隊采用了小型電機,并研發了一種方法,可通過該骨骼結構有效地散發電機產生的熱量。
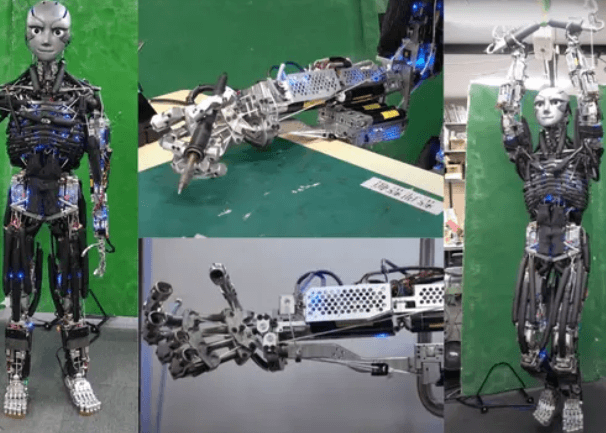
機器人前臂(圖片來源:東京大學JSK實驗室)
據研究人員所說,此類方法促成他們研發了一種帶有橈尺關節的機器人前臂,而且其模仿了人類手臂的比例、重量、肌肉分布和關節功能。該機器人前臂完成了焊接、翻閱書籍以及揮羽毛球拍等任務,展示了該機器人能夠使用橈尺結構執行進行熟練且類似人類的動作。
微型肌肉模塊
近年來,人形機器人得到了蓬勃發展,如本田研發的ASIMO機器人,擁有兩條手臂和兩條腿,可以模仿人類的動作。
目前,研究人員的研究范圍已經擴展到肌腱驅動的肌肉骨骼人形機器人,可以復制人體的比例、關節結構、驅動系統、肌肉分布以分析和實現與人類類似的動作。
來源:第一電動網
作者:蓋世汽車
本文地址:http://m.155ck.com/news/shichang/244019
以上內容轉載自蓋世汽車,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號