
今天著名特斯拉黑客 Green 在推特上分享了特斯拉新版本軟件的功能介紹,時隔 3 個月,Autopilot 功能終于迎來了新的更新,看完版本介紹之后,我認為特斯拉向實現 Full Self-Driving Capability 又邁出了開創性的一步。

識別信號燈、停車標示并自動剎停
先來看這次更新的版本介紹。
原文過長,后臺回復 Autopilot TACC 獲得完整版本介紹
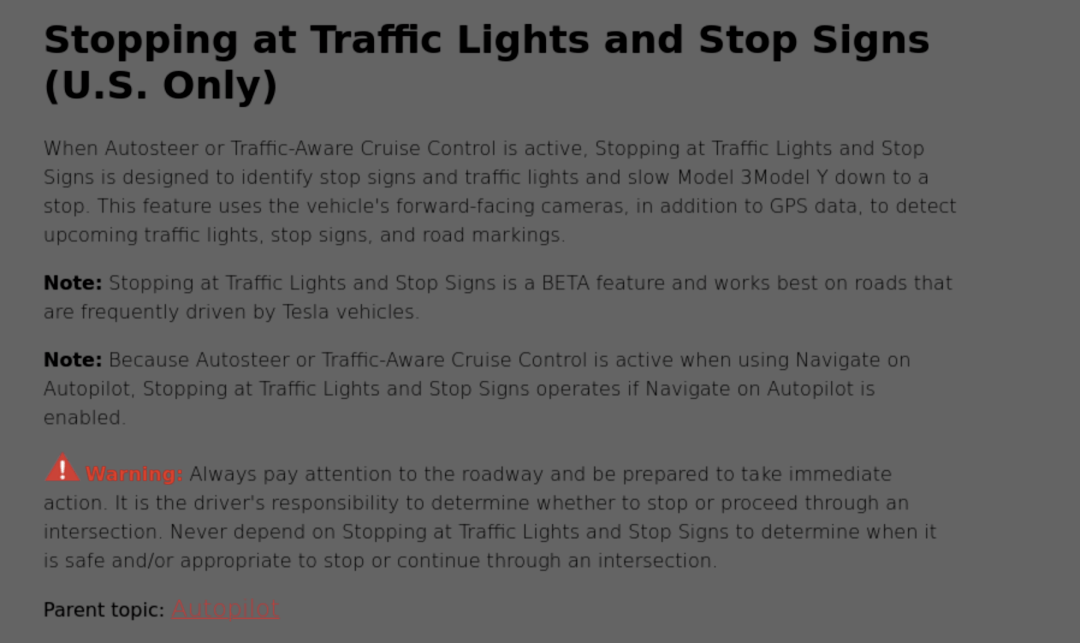
在新版本軟件中,車輛在 Autopilot(下文簡稱 AP)狀態下識別到「交通信號燈」、「停車標志」和「停車線」后,可以在停車線前自動剎停,并且在駕駛員給出確認信息后,車輛還可以自動通過十字路口。
這意味著 AP 已經可以主動通過一些沒有車道線的直行路口了,注意我加黑的 3 個關鍵詞,也就是說本次的軟件更新進一步拓展了 AP 在市區路況下的工作能力,逐漸擺脫了對車道線的強依賴,這是實現 Full Self-Driving Capability 的重要一步。
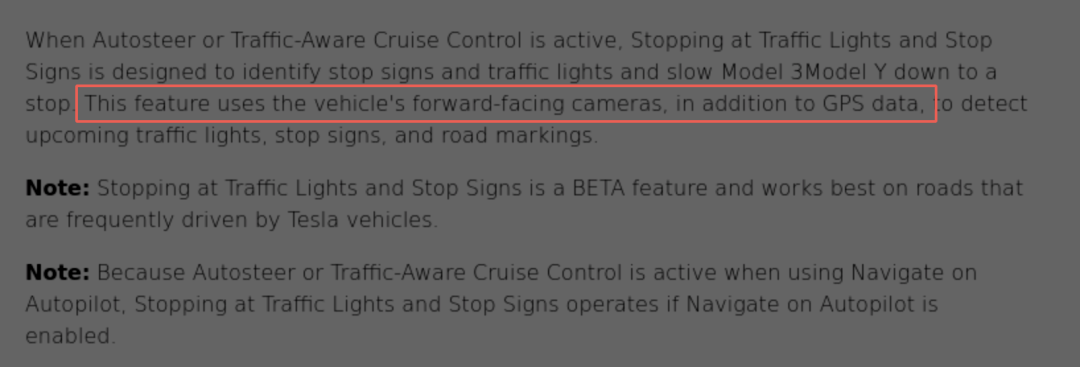
從以上幾個場景來看,目前只能支持短時間擺脫了對車道線,特斯拉在版本介紹中明確表示,該功能并不僅僅基于前置攝像頭的視覺感知識別,還會集合 GPS 地圖數據。
也就是說雖然短時間擺脫了對車道線的依賴,但是 GPS 地圖數據的依賴逐漸提高。
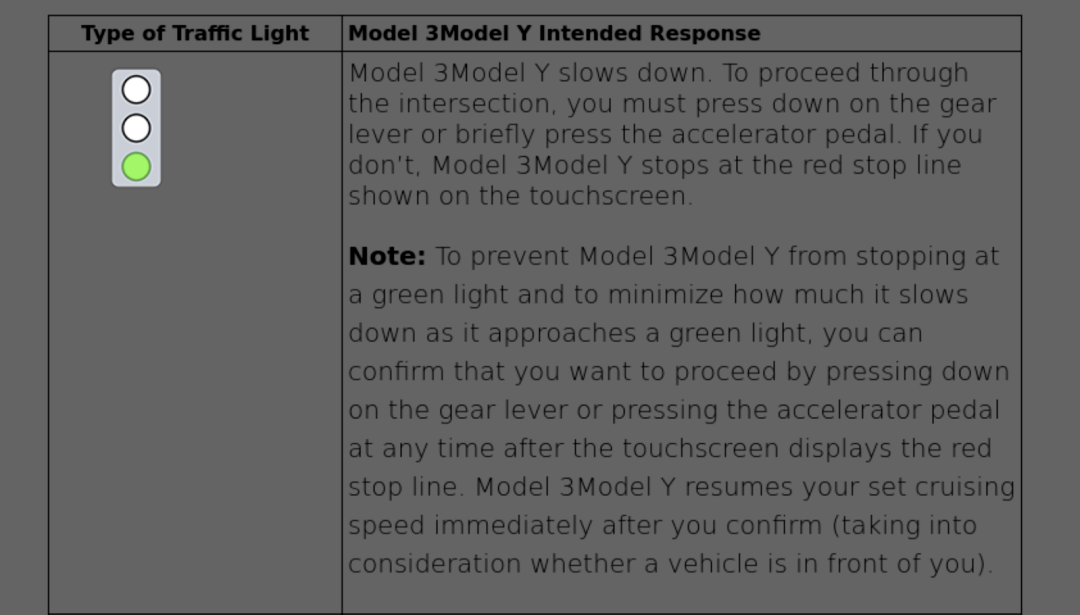
另外還有幾個細節是,車機屏幕上會提前顯示出識別到的紅綠燈和停車線,即使在綠燈情況下,車輛的第一決策仍然是減速,駕駛者需要通過「撥換擋桿」或者「輕點加速踏板」兩個方式,恢復巡航,車輛才會自動通過紅綠燈路口。
在黃燈或者綠燈閃爍的情況下,如果車輛還未駛過停車線,系統則會自動剎停,如果車輛駛過了停車線,則會正常通過。
在紅燈情況下,車輛會自動剎停,但是同樣需要駕駛者通過「撥換擋桿」或者「輕點加速踏板」兩個方式,恢復巡航。
這里的邏輯與目前高速路段中 NoA 狀態下的變道策略完全相同,車輛自動做出變道的決策,但是需要駕駛者給出確認信號,車輛才會執行。
就像一個在學過馬路的 3 歲的小朋友一樣,到了路口不管紅燈還是綠燈,先減速,再問爸媽可以過嗎?爸媽說可以,然后再過。
今天早上我們在微博上發布了這則信息之后,也有網友提出了質疑,例如:「經歷過北京春節滿街紅燈籠的洗禮嗎?」
(畫面大家可以腦補一下)
這就是特斯拉僅靠視覺識別判斷紅綠燈需要克服的一個重要問題,如何提高識別的正確率?
在 2019 年底,特斯拉推出全自動駕駛可視化界面預覽,意味著車輛已經可以識別紅綠燈、停車標示了,但是還不能判斷紅綠燈給出的信息到底是什么意思。
千奇百怪的紅綠燈造型,千奇百怪的執行邏輯,尤其是一些復雜的大型路口,對于路癡們來說,見了都得懵半天,更不要說啥都不懂的機器了。
為了教會機器如何判斷紅綠燈,特斯拉的方法是,通過「自監督學習」。簡單來說就是,系統看到了現在是紅燈,雖然系統不知道是什么意思,但是系統通過駕駛者剎車的操作可以判斷出,紅燈需要停車。
以特斯拉目前的水平顯然做不到 100% 的識別正確率,為了保證安全,每次執行自己的決策之前都會找駕駛者確認一遍,但每個確認的過程都是學習的過程。
這也是特斯拉無法完全放手讓系統自行通過路口的核心原因。
對于特斯拉來說,越多人使用意味著可以積累越多數據,但是對于駕駛者來說,AP 狀態下每次通過路口都需要增加一個「確認」的操作,很大程度降低了用戶體驗,尤其是綠燈場景下,每一輛開著 AP,但沒有及時確認的特斯拉都會是路口的一個大型路障。
今天下午,我兩位特斯拉車主介紹了新版本軟件的工作邏輯之后,得到了兩個評價。
其中一位認為特斯拉作為第一個實現「自動」通過十字路口的車型,給了所有車型一個很好的示范,很大程度簡化了「自動」通過路口的流程,面對復雜的紅綠燈路口,只需要通過「輕踩加速踏板」即可完成決策。
另一位則認為,我原來開著 AP 可以直接過紅綠燈,現在反而更麻煩了。
如果你問我這種犧牲短時間的用戶體驗來獲得一個快速成長的取舍值得嗎?
值得,為了獲得科技帶來的開創性體驗,我愿意犧牲短暫的體驗,我也期待在特斯拉完成了「量變」積累之后,使用體驗的「質變」。
下一個挑戰
這次的功能說明雖然很長,但是「警告」占了多半篇幅,看了兩遍之后,我弱弱地在群里問了一句:「特斯拉這個應該還不能實現自動轉彎吧?」
得到的答復是:「在通過路口時只能直行。」
而我期待的是,新版本軟件更新之后車輛可以根據設定的導航,自行通過簡單的十字路口或 T 型路口。
這也是特斯拉實現城市道路 NoA 的下一個重要挑戰,而在我看來,在十字路口實現左轉或者右轉,難度系數相比直行提升了不止一個數量級。
不如讓我們拆解下,完成自動轉彎需要那些支持。
車輛得獲得轉彎的指令
這一點并不難,只要在車機上設置好導航即可。
探測目標方向是否有其他參與者
從特斯拉感知硬件的布局來看,系統更擅長探測正前方及正后方的道路參與者,但是轉彎,尤其是在直角彎道以及掉頭的路況下,意味著車輛需要探測車身左右兩側的道路參與者,顯然在感知范圍層面來看,已經給系統提出了更高的難度。
判斷其他道路參與者的意圖
在十字路口,路權最高的是直行的車輛,其次是左轉,最后是右轉。
在通過直行的紅綠燈路口時,只要你確保你沒有違反信號燈的指令,并且不撞上前方車輛,即可保證「無責」,但是在左轉 or 右轉的情況下,系統需要判斷多個方向的道路參與者的意圖,并及時做出判斷。
執行決策-完成轉彎
所以通過開放道路的紅綠燈路口并不只是會看紅綠燈那么簡單。相比目前的 L2 輔助駕駛,「直行」通過紅綠燈路口只是在之前的基礎上做了一些加法,而「轉彎」則是乘法。
寫在最后:
作為一個自動駕駛擁簇者,在特斯拉推出智能召喚之后,我已經很久沒有如此期待一個新版本軟件的到來了。身邊支持 L2 輔助駕駛的車型越來越多,但能夠帶來新鮮感的卻寥寥無幾,所有人都在做特斯拉的跟隨者,而我們周圍需要的是更多的「開創者」,特斯拉是為數不多可以保持持續「開創」能力的車企。
來源:42號車庫
本文地址:http://m.155ck.com/carnews/xinche/112573
以上內容轉載自42號車庫,目的在于傳播更多信息,如有侵僅請聯系admin#d1ev.com(#替換成@)刪除,轉載內容并不代表第一電動網(m.155ck.com)立場。
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!

 京公網安備
11010502033163號
京公網安備
11010502033163號