
NOP航拍鏡頭
9月中旬,我們在北京搶先試駕了蔚來的 NOP 功能,也就是加入了高精地圖的領航輔助功能。
這是繼特斯拉推出 NOA 領航輔助功能之后,全球第二家推出這一「自動駕駛」高階功能的車企。
電動星球.蔚來NOP搶先體驗視頻
相關的體驗視頻,我們錄制如上。
但影像只是事實的一部分,在測試 NOP 期間,我們還多次與蔚來工程師進行了交流,于是就有了這么一篇文章,更為技術地去解讀蔚來的 NOP ,此外也對視頻做一些圖文補充。
那么,到底蔚來的 NOP 表現怎樣?對比特斯拉的 NOA,又怎樣?
看完上面的視頻,可以接著看下面的圖文。
以下,Enjoy!
1
NOP全解讀

蔚來產品經理張楠在workshop上
(1)、從NP 到 NOP
全球范圍內來看,視覺識別技術、多傳感器融合技術和神經網絡算法等與自動駕駛強關聯的技術正在迅速迭代。這使得圍繞智能電動汽車的競爭逐步加劇。
蔚來的 NOP 正是在這樣的大背景下完成研發的。
蔚來產品經理張楠在 Workshop 說,NOP 本質上是蔚來 NIO Pilot 自動駕駛包里的一個新功能,但正式立項研發是在去年年中。決定要研發,除了硬件冗余、技術進步帶來了功能實現的可能,還在于很多用戶反饋時提出了這樣的需求。
NIO Pilot (以下簡稱 NP)是蔚來的高級輔助駕駛系統,在 NOP 功能推出后,大致可以說接近了大家認知中的 L3。但蔚來依然將其定義為 L2 級的自動駕駛。
NP 的很多核心功能,是從去年 3 月份開始逐步釋放的,至今一年多。

一年多來, NP 的用戶反饋總體不錯。從數據來看,有超過 50% 的蔚來用戶選擇了NIO Pilot 包,目前行駛里程已經超過了 7000 萬公里、100 萬個小時。

但 NIO Pilot 功能推出后,很多車主提出反饋。比較多的意見是,Pilot 雖然很好,但希望能在場景上多一些拓展、在功能體驗上進一步迭代。于是,蔚來在 2019 年年中開始立項開發 NOP 。
短短一年從立項到完成開發、即將釋放,NOP 的進展很快。張楠認為,這得益于兩個方面。
1、自主研發;2、硬件冗余。
自主研發,指的是在涉及自動駕駛的傳感器融合、算法、標定、策略等關鍵環節上,蔚來都是自己干的。
用官方話術來說:
「蔚來通過獨立正向研發,掌握智能電動汽車的六項核心技術——包括“三電”系統的電機、電控、電池包,“三智”系統的智能網關、智能座艙、自動輔助駕駛系統。這六項核心技術,蔚來都擁有完全的自主知識產權。世界上同時掌握這六項核心技術的車企,只有兩家,另一家是特斯拉。」

蔚來自動駕駛負責人章建勇在workshop上
蔚來自動駕駛、 NIO Pilot 系統開發負責人之一章建勇透露,他們團隊目前有 100 多人,主要工作在上海。
章建勇在 Workshop 上表示,NOP 是一個持續進化的系統。
「人開車用導航輔助完成的動作,領航系統都可以逐步地在個人駕駛過程中把它完善,包括導航和高精地圖、以及自動輔助駕駛的深度結合,以及在高速和快速路上實現自動進出匝道、自動換道、自動調整車速和超車的過程。」
至于硬件冗余,則指的是蔚來目前所有車型標配的 23 個硬件傳感器,以及芯片、算力、識別系統等等。
NP 硬件具體包括:1 個 Mobileye EyeQ4處理器,1個前向三?攝像頭,4 個環視攝像頭,5 個毫?波雷達, 12 個超聲波雷達,1 個駕駛員監測攝像頭。
正因為所有在售車型都標配了這些硬件,蔚來才能夠在有用戶需求、有新技術迭代或升級、或新的交通法規釋放的時候,有能力基于現代車型,讓新、老用戶都可以升級這些新功能。
「有的品牌隨著自動駕駛包功能迭代升級之后,可能會有一定價格調整,甚至會漲價,而我們不會,我們會給所有的老用戶、新用戶在價格不變的情況下都可以推送這樣的功能。」
此外,高精地圖對于 NOP 的意義也非常重大。
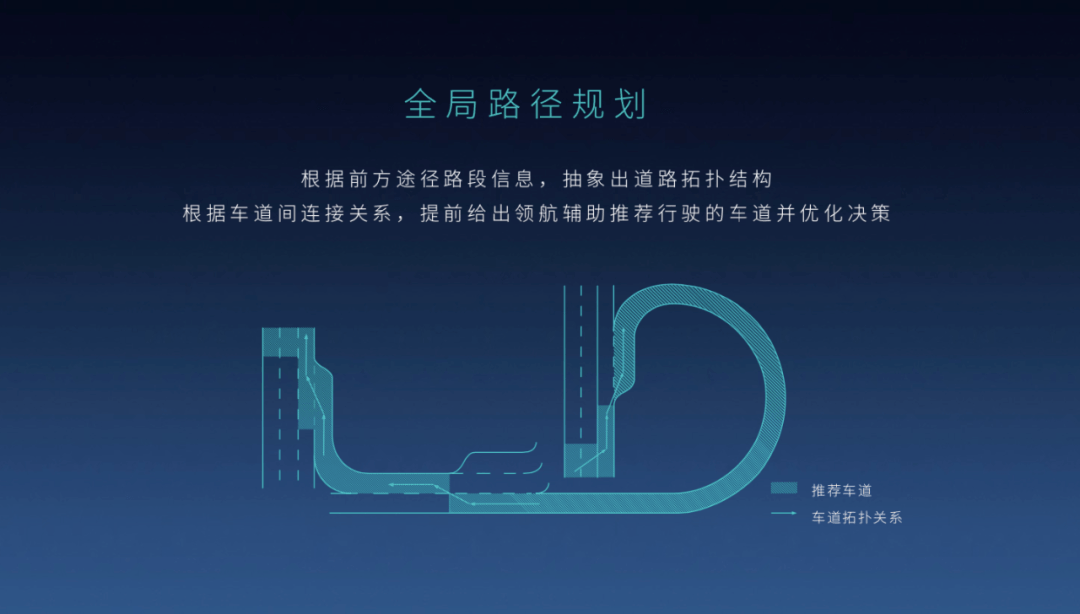
從大的方面來看,沒有高精地圖就不會有「全局路徑規劃」。
這樣的路徑規劃,指的是系統知道在下一個路口是否需要右拐?后面兩公里、三公里是什么路段、怎樣的道路結構?進而推斷出以什么速度并到哪條車道、在匝道口需要采取怎樣的方式等等。
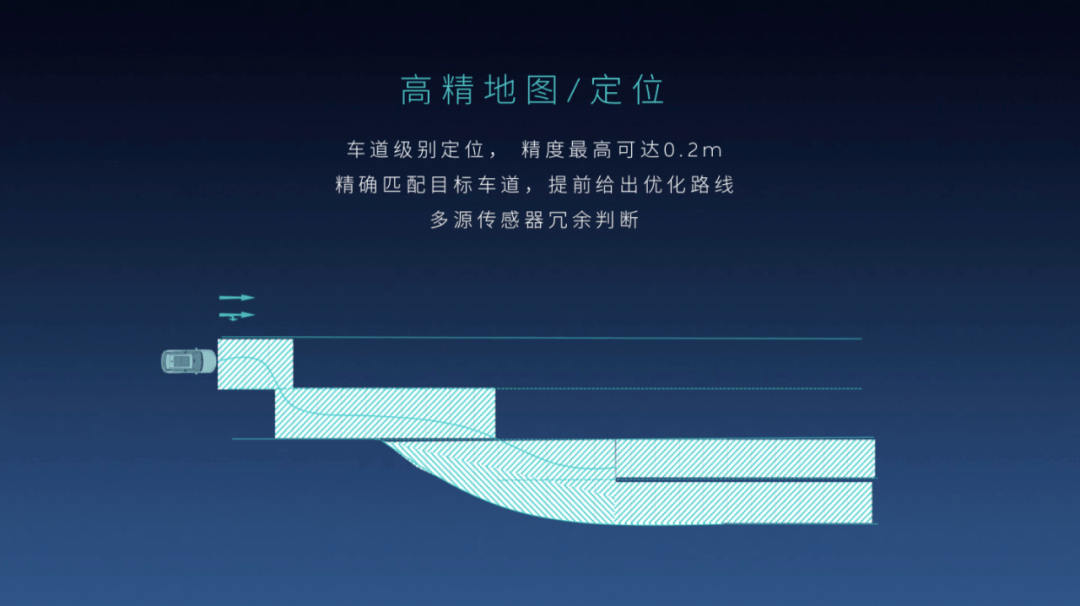
有了地圖信息,還需要知道「自己在那條車道、什么位置上」,也就是完成定位。
「我們在量產車上實現了車道級別的自定位,精度最高可以達到 20 厘米,意味著我精確地知道我這個車處于哪條車道上。」
章建勇說,中國路況非常復雜,有些地方可能 GPS 會信號不好,比如隧道等,還有一些地方比如車道線路不清楚,「而我們團隊在中國可以在超過98%的場景上實現定位和控制。」
(2)、中國適配
在討論自動駕駛時,我們常說一個詞——數據。數據,指的是自動駕駛輔助系統學習所必須使用的道路數據。
這包括絕對數,譬如蔚來過去一年 NP 所跑過的 7000 萬公里、100 萬個小時。
數量越大,代表 NP 可能遇到的 Corner Case (小概率事件)越多。通過學習,進而能夠覆蓋更多的場景。
它還包括適配的能力。
各國各地的交通場景都不一一樣,道路標線不同、紅綠燈形狀不同、甚至連錐筒都有紅色和綠色之分。
有針對性的提取特征點,形成更本地的識別能力和控制邏輯,是有效提升 Pilot 能力的方法。
在 NOP 上,蔚來就對中國場景進行了大量的適配。
1、范圍更廣。
章建勇說,他們不像特斯拉一樣只覆蓋了高速公路,蔚來的 NOP 還覆蓋了城市快速路,「這對在大城市里上下班的用戶而言,時間和場景的覆蓋率提升了非常多。」
我們進一步問區別在哪里?
他們以北京上海為例做了一個說明。在北京,蔚來能在五環開啟 NOP ,特斯拉 NOA 不能;在上海,蔚來能在南北高架開啟 NOP,特斯拉 NOA 不能。
2、本地標定
主要是進出匝道、第一車道路原則、和車速控制。
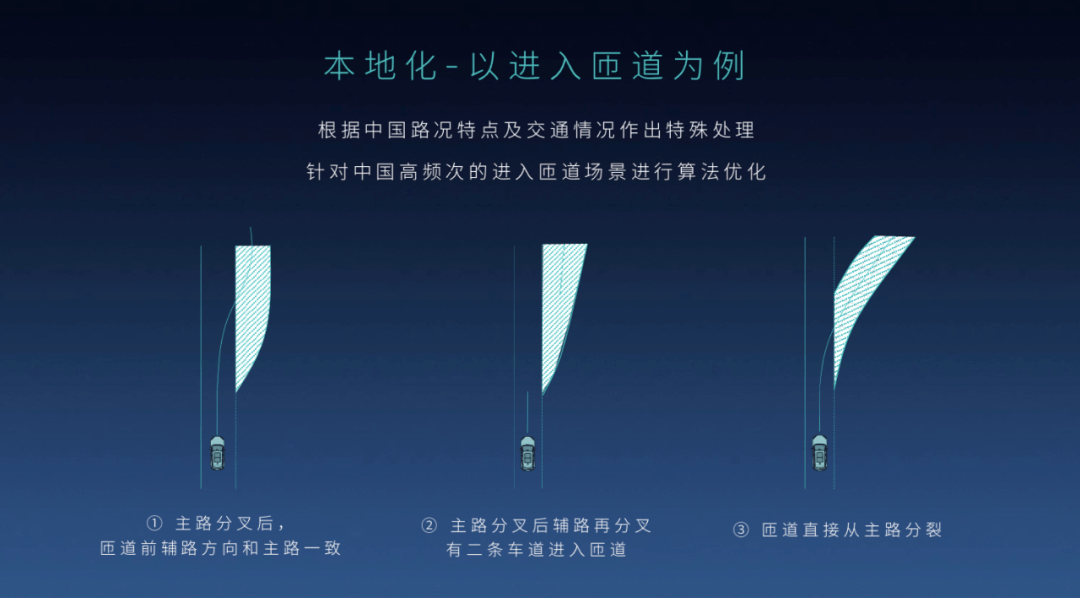
在中國,匝道場景非常多:
「有的路可能直接是匝道和主路方向一致,一條道并進去,還有的是輔路、匝道會分成兩條道,還有的是匝道會直接分裂出去。」
此外,匝道口的情況也不一樣的,有的匝道比較寬,還有的特別窄,每個匝道口的標志也都不一樣,「線有斜的、有順的,各種方式都有。」為此,蔚來團隊針對高頻詞的進入匝道場景進行了算法優化。
章建勇說他們在開發過程中采取非常多的技術手段和不同的策略,去不斷地優化和調整,從而「即要保證速度比較平和下降,又要保證整個車輛控制。」比如方向盤打的不能太猛,要比較平順地打。進入匝道以后,要看下面的匝道到底分成哪幾類匝道,去快速并入。
第一車道原則,指的是蔚來 NOP 在高路公路行駛時,如果在左側快車道時會盡量保持車道不變換,也盡量不右道超車。
當然,如果遇到「做了很多優化之后,看到在快車道上有慢車,我還得從右邊去變道。」
降速則是更為細節的東西。
舉個例子,如果左邊車道貨車多、低速行駛的車多,NOP 也會像人一樣,稍微把車輛速度降低點,以符合人的降速預期。
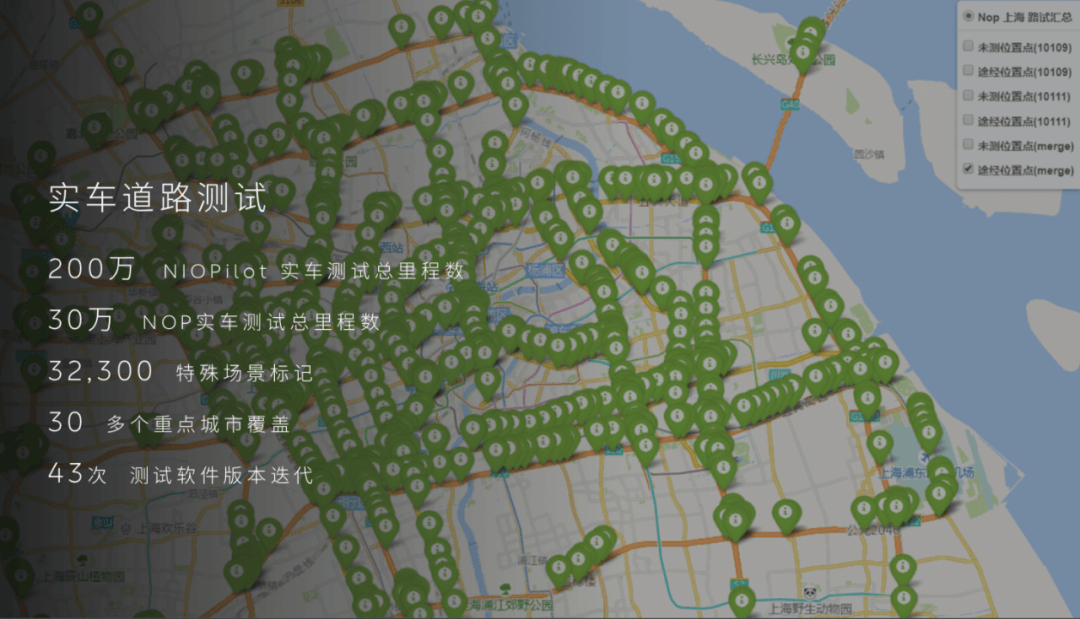
章建勇告訴我們,NOP 在路測時,所有的特殊場景都會做好標記。現在被標記的特殊場景數已經超過 32300 個。
譬如上面這個上海路測地圖,打好標的都是特殊場景標志。光上海就已經覆蓋14902 個特殊場景。蔚來在全國 30 多個重點測試城市做了測試覆蓋,整個測試軟件迭代了 43 次。
此外,由于有高精地圖的加持,NOP 全程都會實現全智能控速,并和 NOMI 結合,實現全場景的人機交互和提醒。
(3)平衡
在 Workshop 上,章建勇經常提到「平衡」。
所謂平衡,指的是執行策略的度——在流暢用戶體驗和技術安全之間取得平衡。在這方面,不同廠家執行時的理念會不一樣。
譬如,天氣對自動駕駛系統的影響。
小雨、中雨、大雨,策略都會不同。大雨時,人看不清機器也看不清。有的廠牌會干脆更加保守點推出系統,讓人自己慢慢去開;也有的廠牌往前進一步,盡可能做到少退出。
這樣的少退出,蔚來在「技術上也可以實現,但風險會加大——攝像頭看不清楚了,只靠毫米波雷達。」
為了確保安全,蔚來做了故障檢測系統,如果發現逆光了,比如攝像頭遮擋,起霧了,整個系統會做一些故障診斷、以及系統降級策略,「我們在技術上叫Failsafe。」
又譬如在換道時的策略。
攝像頭看到的信息,其實和人實際開車的信息是不完全一致的,比如攝像頭毫米波看到了車輛,但人可能看到的是前車的一些行為、顏色的判斷。
「實際上從傳感器的世界來說,看到的信息是沒有人這么豐富、主觀的。」
而人在超車變道時,會有一個競爭和博弈的過程,「有時候,轉向燈就是后車加速提示器。」
但對輔助駕駛系統來說,要不要主動去創造一個競爭和博弈的環境?
章建勇認為不要,「不能拿自己的車跟別人博弈,只能從設計角度來說保持一個相對安全、保守的策略。因此,大家可能會看到,相對人來說機器做的是比較保守的,因為畢竟還是處于輔助駕駛階段。」
基于這個設計理念出發,蔚來做了非常多理論化的處理。譬如上圖,蔚來的并線功能會根據不同的車流、交通流的狀況進行速度動態調整。
他說,如果把一個安全邊界往回退,雖然看起來會保守一些,但理論上來說也是降低了整個大范圍事故發生的概率系數。
2
體驗

體驗補充,主要是補充說明我們錄制的視頻。按場景來說,分三點。
(1)匝道

NOP 會根據路徑規劃,在距離匝道口大約兩公里時通過 NOMI 進行提醒,并開始執行變道策略。
如果是在中間道路,NOP 的執行能力會超越預期。如果是在四車道的最左車道,根據車流狀況的不同,就有人工干預的可能
此外,這時的自動變道無需人工確認,無論在設定時是「需要確認」還是「無需確認」。
視頻截圖,前方無車,進入匝道自動降速,尾燈亮起
進入匝道引線時,系統會自動將速度降到 60 公里每小時。在進入匝道后,會根據彎道曲率進行調整時速,以確保順利通過。蔚來 NOP 不存在沖匝道的情況。
但中國的匝道場景的確比較復雜。
首先部分匝道的引線很長。
如果車速較快,進入匝道后會有一個較長時間的慢車情況。人類司機會加一腳油門,直接超越前車再回到匝道引線,但系統不會。比較快速的降速,對于后方來車也并不友好。但如何平衡好這一百米的速度,從我們目前接觸過的類 NOP 功能來看,都是一道難題。
其次,有些路段進匝道一分二,出匝道二合一,也就是所謂的喇叭口。蔚來 NOP 雖然在車流量小時可以應對大部分情況,但在車流量大、車道線不清晰的情況下,系統會出現搖擺、退出的情況,建議最好人工介入。
(2)變道

自動超越慢車,是領航輔助功能的主要特征。
就蔚來 NOP 而言,如果前車時速低于本車設定時速 20 公里每小時,系統會執行自動超車。
如果設定時選擇了「需要確認」,則需要人工打轉向燈予以確認;如果設定時選擇了「無需確認」,系統則會根據路況自動執行。
從我們的體驗來看,「無需確認」的整體感受會好于「需要確認」

第二,NOP 自動變道有多種執行策略。
有加速變道的,也就是在側后方無車時,在變道過程中進行加速,快速超越前車;
也有減速變道的,當側方后有車快速逼近時,選擇適當減速,讓車后再變道。
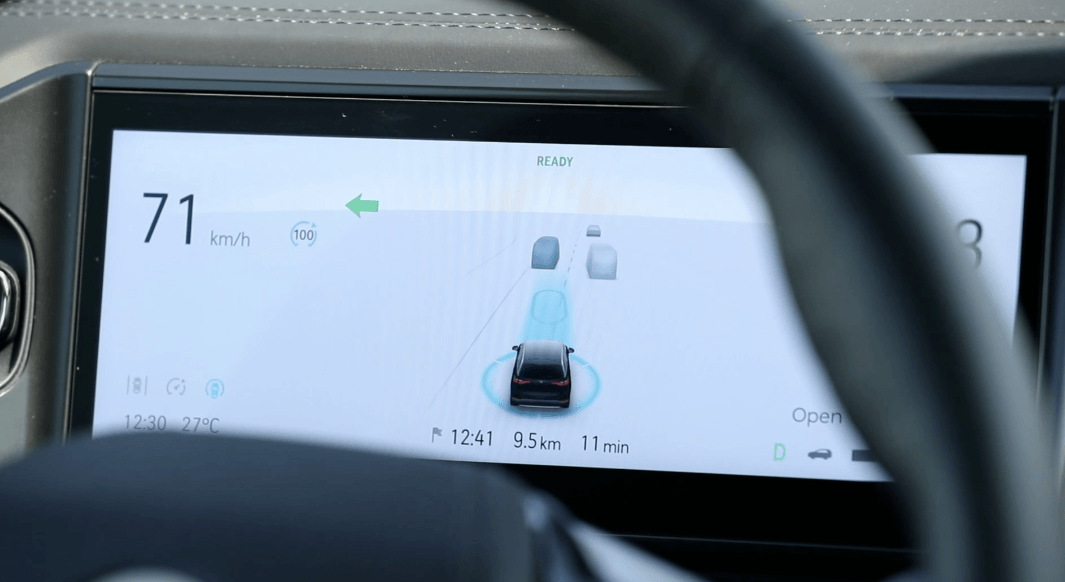
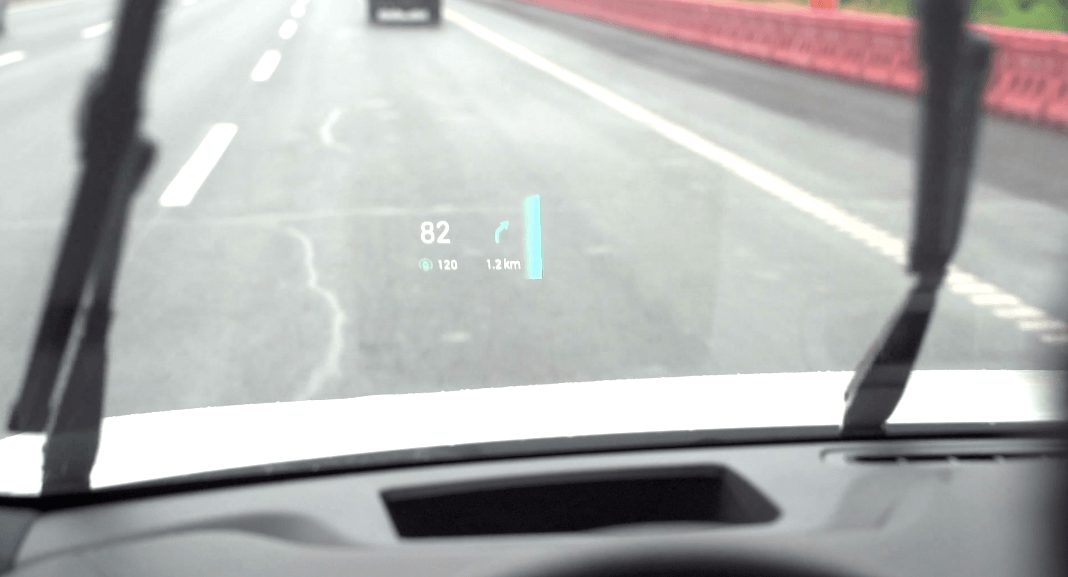
此外,NOP 在變道時,車輛儀表盤新增交互了效果。譬如上圖所顯示的「車輛虛位框」。HUD 也新增了光柱效果。
(3)車流

NOP 的表現依然受限于車流情況。
如果車流量小,NOP 的體驗會非常棒,絲毫不遜于特斯拉 NOA,而且還沒有特斯拉 NOA 早期意向不明的變道。無論是在雙車道、四車道,還是匝道中。
如果車流量大,NOP 的體驗會下降很多,也會遜于特斯拉的 NOA。
譬如在車流量大時超車,特斯拉 NOA 會顯得更大膽一點,一些路段可以執行變道。但蔚來NOP 的策略更為保守,需要人工介入。譬如在匝道并入主線時。
但是,無論是蔚來 NOP ,還是特斯拉的 NOA ,都會在車流量大時出現無法變道、在匝道匯入主線時被逼到引路盡頭的情況。
蔚來 NOP 更早放棄,特斯拉則會努力做到系統的極限。但放棄早,也意味著駕駛者有更多反應時間;做到系統極限,機器有可能成功,但如果失敗,留給駕駛者的時間就極少。
兩種策略,好與不好,大家各自評述。
(4)總結

從個人角度來看,蔚來的 NOP 是超越早前預期的。
不僅因為它是全球第二家推出此項功能的車企,還在于這項功能體現了蔚來敏捷開放的技術能力。
當下的 ES8 也好、ES6 也好,均是在四五年前開始定義的。如果不是在研發之初在硬件選擇、電子電氣架構上有足夠思考,就不會有現在的硬件冗余,不存在 NOP 推出的可能。
這是前瞻,也是從用戶需求出發的思考。而其實際體驗,也超出了我此前的預期。
3
Q&A
問題一:蔚來NOP 的覆蓋范圍和特斯拉 NOA 相比有什么不同?
章建勇:我們覆蓋了所有的城市高架路和高速公路,舉個例子,像上海、廣州所有的高架路和高速公路都是允許用的。像北京,比如五環上,我們的 NOP 領航輔助是可以用的,特斯拉可能五環不能用,但高速上也能用。至于高架路,特斯拉在高架上不能用NOA。
問題二:理想汽車說他們是全球第二家使用影子模式采集數據的車企,蔚來有沒有在做影子模式?
章建勇:影子模式其實大家都會去做,我們也會在一些有價值的場景上、一些特殊場景下去做。實際上在很多開發過程中,或路試的時候,如果這個系統沒有經過充分驗證,是不能隨意開啟的,一定會經過大量的影子模式測試.
但影子模式的數據采集,最后一定要和功能開發同步。如果光采集數據,不去做功能開發和發布,影子模式效果也不一定能真正發揮出來。這就跟你采集了所有的圖片和數據,但只是簡單地把圖像傳回來一樣。因為對數據的高效使用才是關鍵。數據收集越多,需要優化的點就會越來越多。
此外,影子模式也不是萬能的,比如有些場景下你用影子模式,采集回來的所有數據要判斷數據和算法是不是匹配,能不能優化整個算法,其實在技術上是需要一個增值系統的,就是你需要知道這個環境下它的判斷是真的還是假的。
舉個例子,比如 AEB 緊急制動可以很簡單判斷。就是你能看一下前面是不是真的有車,真的應該剎車,就會很容易判斷。但對一些進出匝道等一些復雜環境,其實沒有辦法用一個非常自動化的方式去判斷,如果沒有人工判斷,不太容易知道當時進這個匝道打的非常順還是非常不順。
問題三:國內做這樣的功能升級,是不是需要政策法規的批準,以及接下來整體的法規環境在這方面是否是比較開放的狀態?
章健勇:目前來說,整個輔助駕駛系統都是符合目前政策法規要求的,我們看到很多新的法規也在討論,包括政府會推一些試點,比如無人駕駛區域示范運行、以及特殊區域發一些路試牌照。
就我們的系統來說,如果從法律定義,它還是 L2,相對來說現在所有的法規都還適用,只不過還是需要駕駛員去關注和注意,它不是法律意義上的 L3、L4。
問題四:中國有很多地方,高精地圖是不開放的,尤其是一些特殊地方,像在這種地方,蔚來一般是怎么處理的?
章健勇:蔚來現在用的是百度的高精地圖,高精地圖在有些區域因為法規要求不允許開放,有些區域是因為現在所有高精地圖從采集到制作、到發布更新,不是實時在線的,包括采集的時候,在中國道路的更新和修改會很快,可能采集的時候發現這里是限速,過了半年之后,這個限速可能不對,這些狀況都可能會存在。
高精地圖相當于領航輔助一個更遠的傳感器,但這個傳感器,我們可以認為它不是100%都是準確的。所以,最后還是要依靠本車的視覺和信息。
比如說我在隧道里,非常長,有些場景下,地圖的定位不一定能夠匹配到,比如GPS 在非常長的隧道里可能會不準,其實沒問題,我們可以把領航輔助降級到Pilot 系統,還在車道內穩定行駛,但圖標從長條會變成 NIO Pilot 行駛模式,出來之后還會去嘗試重新定位,定位到的就會重新進入領航模式。
如果還沒有匹配完成,就提醒駕駛員現在還處于Pilot模式,你要進行超車變道、或進匝道,可能需要人手動去做。
(完)
來源:第一電動網
作者:電動星球News蟹老板
本文地址:http://m.155ck.com/kol/128844
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!












 京公網安備
11010502033163號
京公網安備
11010502033163號