撰文:朱 琳
編輯:張霖郁
設計:杜 凱
來源:TechXplore,作者:Ingrid Fadelli、Simon Le Cleac'h
盡管許多自動駕駛汽車在模擬或初始測試中取得了令人矚目的表現,但當在真實街道上測試時,它們往往無法根據周圍其他車輛或行動者的軌跡或運動來調整自己的軌跡或運動。在需要一定程度協商的情況下更是如此,例如在十字路口或有多條車道的街道。
斯坦福大學的研究人員最近創建了LUCIDGames,這是一種計算技術,可以預測和規劃自動駕駛汽車的自適應軌跡。他們在arXiv上發表的一篇論文中,提出了一種基于博弈論的算法和一種估算方法。
“隨著過去幾年自動駕駛技術的發展,我們注意到,某些駕駛操作,例如在無人保護的十字路口處左轉,改變車道或合并到擁擠的高速公路上,對于自動駕駛仍然具有挑戰性,而人類卻可以很容易地執行它們。”進行這項研究的研究人員之一西蒙·勒克萊克(Simon Le Cleac'h)告訴TechXplore。“我們認為,這些互動涉及自動駕駛汽車與其周圍汽車之間的重要交涉。”
人類通常能夠找出其他司機在他們周圍駕駛車輛的目標,并進行決策,比如在給定的十字路口誰先走。在他們的研究中,勒克萊克和他的同事們試圖在自動駕駛汽車上復制這種能力,以及支持這種能力的復雜行為。他們的總體目標是讓自動駕駛汽車識別周圍其他車輛的目標,以便在涉及某種協商的情況下規劃出更合適的軌跡。
“我們的工作結合了兩種主要工具,一種是基于博弈論的算法,另一種是估算技術。”勒克萊克說。“基于博弈論的組件允許自動駕駛汽車在目標可能與自身目標不完全一致時,對與其他行動者(車輛、行人、騎自行車者等)的互動進行推理。另一方面,估算技術是允許自動駕駛汽車在與其他行動者互動時迅速發現潛在目標,例如,期望的速度、期望的車道或每輛車與自動駕駛汽車互動的攻擊性程度。”
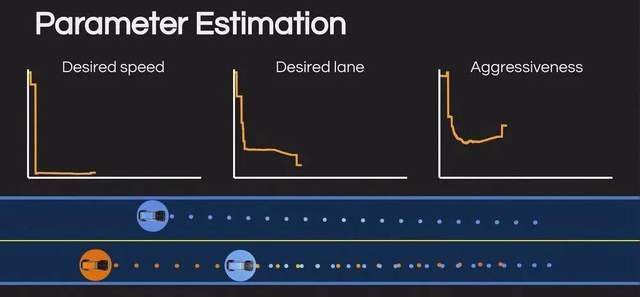
參數估算:期望的速度、期望的車道、車輛攻擊性
LUCIDGames是由勒克萊克和他的同事們提出的技術,旨在讓自動駕駛汽車能夠快速識別附近車輛和行人的目標。這使他們能夠預測這些行動者未來的行為,并在它們周圍安全操作,即使是在復雜的情況下也可以如此。
研究人員創建的系統由“評估者”和“決策者”組成。“評估者”是一種識別駕駛員目標的技術,而“決策者”是一種控制自動駕駛汽車轉向角度和加速度的算法。決策者根據評估者收集的信息確定最適合車輛的軌跡。
“一開始,自動駕駛汽車并不知道旁邊車輛的目標,因此評估者只能猜測車輛的目標。”勒克萊克解釋道。“每猜一次,自動駕駛汽車就會預測汽車在接下來幾秒內的軌跡,然后將預測結果與現實情況進行比較。在預測未來時最準確的猜測被保留了下來。”
在最初的訓練之后,LUCIDGames會對與保留猜測非常接近的其他行動者的軌跡進行新的猜測,并評估它們的預測表現。通過每秒重復幾次這個過程,它改進了自己的猜測,并最終預測出周圍其他行動者將如何移動。
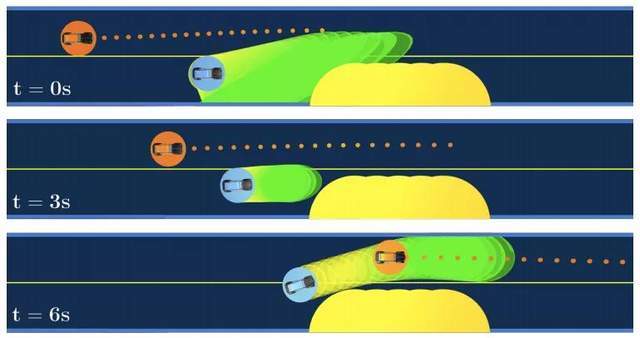
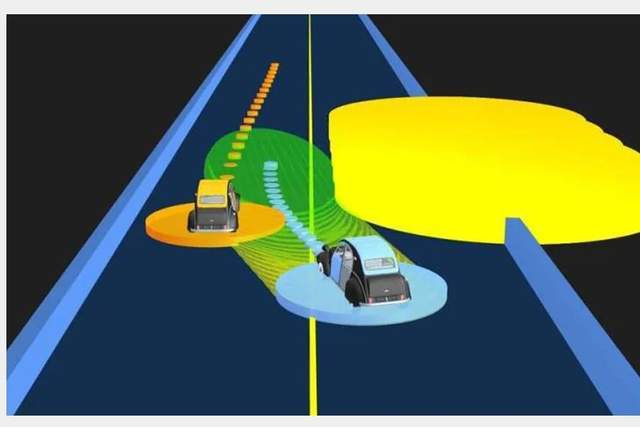
如上圖所示,測試提供了一種場景的三條可視化路線,其中自動駕駛汽車(橙色)和人類駕駛的汽車(藍色)必須在底部車道上越過較大的障礙物(黃色)。自動駕駛汽車根據LUCIDGames的要求,開始時,速度會減慢以避免不確定性的碰撞(綠色),包括兩個可能性:要么是人類超車,要么是人類避讓。
然后,通過觀察人類司機的行為,自動駕駛汽車會更好地估算其目標,并縮小碰撞避免區,選擇了第一個可能性。最后,自動駕駛車輛會在人類駕駛的汽車之前經過障礙物。自動駕駛汽車的計劃軌跡由橙色圓點表示。
“通過我們的技術,自動駕駛汽車還能意識到什么時候它可以對自己的猜測有信心,什么時候有太多不確定性而降低信心。”勒克萊克說。“在這種不確定的情況下,它會采取更加謹慎的行動,與其他車輛保持更大的安全距離。”
勒克萊克和他的同事們設計的這項技術的評估組件,還允許自動駕駛汽車根據在街道上遇到的司機類型調整決策。例如,它可以確定駕駛員是否特別具有攻擊性,從而允許決策組件相應地調整自動駕駛汽車的軌跡和運動(例如,與具有攻擊性的駕駛員駕駛的車輛保持更大的安全距離)。
如果沒有這種估算技術,不管周圍的駕駛員是小心謹慎還是咄咄逼人,自動駕駛汽車都將以同樣的方式移動,執行同樣的動作,這可能會增加事故的風險。
勒克萊克表示:“我們已經看到,在與其他司機互動和協商很關鍵的情況下,將博弈論和評估的概念結合起來,是為自動駕駛汽車生成復雜駕駛行為的有效方法。我們的算法能夠在現實的駕駛場景中,以足夠快的速度為自動駕駛汽車進行估算和做出決定,使其適用于實際。”
在未來,LUCIDGames可以幫助提高自動駕駛汽車的安全性和可靠性,通過預測周圍行動者的動作和行動,讓它們以適應的方式移動。到目前為止,勒克萊克和他的同事們只在模擬中評估了這項技術,但他們現在計劃在真正的自動駕駛汽車上進行測試。
勒克萊克表示:“我們的研究得到了豐田研究所(TRI)的部分資助,我們計劃與TRI合作,在他們的汽車上測試LUCIDGames。我們的實驗室(斯坦福大學的多機器人系統實驗室)已經通過與斯坦福大學汽車研究中心(CARS)合作,在小型模型汽車和全尺寸自動駕駛汽車上進行了博弈論交互實驗。”
來源:第一電動網
作者:汽車商業評論
本文地址:http://m.155ck.com/kol/134778
文中圖片源自互聯網,如有侵權請聯系admin#d1ev.com(#替換成@)刪除。




先估價再買車,買的放心開的安心
您的詢價信息
已經成功提交我們稍后會聯系您進行報價!












 京公網安備
11010502033163號
京公網安備
11010502033163號